1.本实用新型涉及无人机领域,具体涉及一种油气田地面工程输送管道巡线无人机。
背景技术:
2.在现有技术中,无人机是一种先进的无人驾驶自行飞行器,无人机输电巡线系统是一个复杂的集航空、输电、电力、气象、遥测遥感、通信、地理信息(gis)、图像识别、信息处理的一体系统,涉及飞行控制技术、机体稳定控制技术、数据链通讯技术、现代导航技术、机载遥测遥感技术、快速对焦摄像技术以及故障诊断等多个高尖技术领域。现代无人机具备高空、远距离、快速、自行作业的能力,可以穿越高山、河流对输电线路进行快速巡线,对架空线的铁塔、支架、导线、绝缘子、防震锤、耐张线夹、悬垂线夹等进行全光谱的快速摄像和故障监测。
3.由于油气田地面工程输送管道较长,在巡线的过程中也需要一种无人机。目前,申请号为cn202020285653.x的中国专利公开了一种油气田地面工程输送管道巡线无人机。但是,现有的油气田管道巡线无人机依旧存在如下技术缺陷:现有的油气田管道多数铺设在户外,而户外的环境地形复杂,无人机在巡检时摄像头容易粘附户外空气的灰尘从而影响整体的监测效果。针对上述问题,本实用新型设计了一种油气田地面工程输送管道巡线无人机。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种油气田地面工程输送管道巡线无人机,以解决上述背景技术中提出的现有的油气田管道巡线无人机依旧存在如下技术缺陷:现有的油气田管道多数铺设在户外,而户外的环境地形复杂,无人机在巡检时摄像头容易粘附户外空气的灰尘从而影响整体的监测效果的问题。
5.为实现上述目的,一种油气田地面工程输送管道巡线无人机,包括无人机本体和摄像头,无人机本体底部固定连接安装框架,安装框架正面贯穿设置有安装槽,摄像头通过安装杆安装于安装槽内,所述安装框架外侧固定连接有固定框,所述固定框正面从上至下依次设置有安装板、进风口,安装板外侧固定连接有对接摄像头的喷嘴,且喷嘴连通进风口,所述固定框正面设置有对接摄像头正面的清扫杆,所述固定框内置动力端固定连接清扫杆的第一电机,所述清扫杆外侧贯穿设置有多组转轴,且转轴内侧端均固定连接有清理板,所述清理板内侧面均匀设有对接摄像头外侧的毛刷,所述清扫杆外侧还固定安装有驱动转轴转动的第二电机。
6.优选的,所述进风口延伸至固定框的内部,且进风口从外至内口径依次减小,所述进风口内侧端通过连接管连通对接喷嘴。
7.优选的,所述连接管的连接端均设置有密封垫。
8.优选的,所述安装槽的上端以及底部均设置有电连接第一电机的限位开关,所述
清扫杆设置于两组限位开关之间,且清扫杆与限位开关接触配合。
9.优选的,所述无人机本体底部的安装框架外侧面设置有控制面板,控制面板包括处理器和开关,所述无人机本体上端设置有信号收发器,且处理器电连接信号收发器、限位开关。
10.优选的,一组所述转轴外侧端固定连接第二电机的动力端,所述转轴外侧端均固定套设有传动轮,且传动轮之间均通过传动带连接。
11.本实用新型的技术效果和优点:
12.本实用新型基于现有的管道巡线无人机结构设计并且在此基础上进行改进,通过在安装摄像头的安装框架外侧设置对接的固定框将摄像头除尘机构进行安装,一方面通过无人机飞行时将气流压缩经过喷嘴喷出对摄像头表面进行持续清理,另一方面通过电机驱动传动的结构对多组清理板进行转动对摄像头表面进行清理,并且清理板通过清扫杆进行安装并且可往返运动增加整体的清理效果,可有效避免户外巡线时无人机摄像头粘附户外空气的灰尘从而影响整体的监测效果,其整体结构设置简单合理,实用效果佳,值得现有市场作推广使用。
附图说明
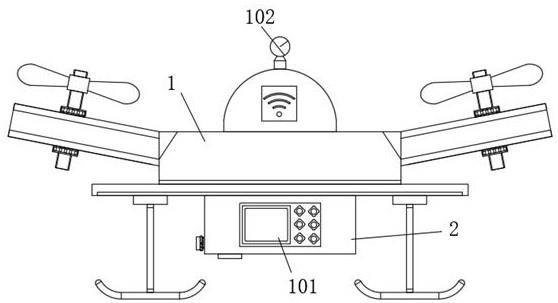
13.图1为本实用新型结构示意图;
14.图2为本实用新型图1中安装框架结构侧面示意图;
15.图3为本实用新型图2中固定框结构侧面示意图;
16.图4为本实用新型图2中清扫杆及连接结构俯视示意图。
17.附图标记为:
[0018]1‑
无人机本体,101
‑
控制面板,102
‑
信号收发器,2
‑
安装框架,3
‑
安装槽,4
‑
摄像头,5
‑
安装杆,6
‑
固定框,7
‑
进风口,701
‑
连接管,8
‑
安装板,9
‑
喷嘴,10
‑
第一电机,11
‑
清扫杆,1101
‑
限位开关,12
‑
转轴,13
‑
清理板,1201
‑
传动轮,1202
‑
传动带,14
‑
毛刷,15
‑
第二电机。
具体实施方式
[0019]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0020]
如图1
‑
4所示,一种油气田地面工程输送管道巡线无人机,包括无人机本体1和摄像头4,无人机本体1底部固定连接安装框架2,安装框架2正面贯穿设置有安装槽3,摄像头4通过安装杆5安装于安装槽3内,安装框架2外侧固定连接有固定框6,固定框6正面从上至下依次设置有安装板8、进风口7,安装板8外侧固定连接有对接摄像头4的喷嘴9,且喷嘴9连通进风口7,固定框6正面设置有对接摄像头4正面的清扫杆11,固定框6内置动力端固定连接清扫杆11的第一电机10,清扫杆11外侧贯穿设置有多组转轴12,且转轴12内侧端均固定连接有清理板13,清理板13内侧面均匀设有对接摄像头4外侧的毛刷14,清扫杆11外侧还固定安装有驱动转轴12转动的第二电机15。
[0021]
其中,进风口7延伸至固定框6的内部,且进风口7从外至内口径依次减小,进风口7内侧端通过连接管701连通对接喷嘴9,连接管701的连接端均设置有密封垫,无人机飞行时,空气气流经过进风口7并且随着进风口7内部的内径逐步变小实现对空气进行压缩,压缩后的空气经过连接管701从喷嘴9喷出对摄像头4表面进行清理,另外密封垫可增加整体的连接密封性。
[0022]
其中,安装槽3的上端以及底部均设置有电连接第一电机10的限位开关1101,清扫杆11设置于两组限位开关1101之间,且清扫杆11与限位开关1101接触配合,一组限位开关1101启动第一电机10带动清扫杆11转动,清扫杆11转动时会接触到另一组限位开关1101,另一组限位开关1101驱动第一电机10反转,如此往复,实现第一电机10带动清扫杆11在两组限位开关1101之间往返转动进行清理。
[0023]
其中,无人机本体1底部的安装框架2外侧面设置有控制面板101,控制面板101包括处理器和开关,无人机本体1上端设置有信号收发器102,且处理器电连接信号收发器102、限位开关1101。
[0024]
其中,一组转轴12外侧端固定连接第二电机15的动力端,转轴12外侧端均固定套设有传动轮1201,且传动轮1201之间均通过传动带1202连接,第二电机15转动后驱动一组转轴12转动,该组转轴12外侧的传动轮1201通过传动带1202驱动其他转轴12随之同步转动,进而使得多组转轴12内侧的清理板13配合毛刷14对摄像头4进行清理。
[0025]
本实用新型的实施例为:本实用新型在清理灰尘时,一方面通过无人机飞行时,空气气流经过进风口7并且随着进风口7内部的内径逐步变小实现对空气进行压缩,压缩后的空气经过连接管701从喷嘴9喷出对摄像头4表面进行清理。当摄像头4表面经过气流清理而效果不佳时,此时摄像头4显示画面就会模糊,工作人员通过地面控制将信号发送至无人机本体1的信号收发器102中,信号收发器102接收到信号后通过控制面板101内置的处理器启动一组限位开关1101和第二电机15,一组限位开关1101启动第一电机10带动清扫杆11转动,清扫杆11转动时会接触到另一组限位开关1101,另一组限位开关1101驱动第一电机10反转,如此往复,实现第一电机10带动清扫杆11在两组限位开关1101之间往返转动,与此同时第二电机15转动后驱动一组转轴12转动,该组转轴12外侧的传动轮1201通过传动带1202驱动其他转轴12随之同步转动,进而使得多组转轴12内侧的清理板13配合毛刷14对摄像头4进行清理,并且在清扫杆11的往返运动下实现对摄像头4进行更为彻底的清理。
[0026]
以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。