1.本发明涉及飞行器领域,更具体的是涉及微型折叠飞行器。
背景技术:
2.现阶段四轴无人飞行器可以自由实现悬停和灵活飞行,因此它可以实现很多其它飞行器无法实现的功能,且成本低廉性价比很高,在各行各业中都可以应用。但是由于四轴飞行器其旋翼占用空间较大,在日常存放、携带不便,没有把四轴无人飞行器的功能最大化。
3.因此,针对上述问题,提出一种四轴折叠翼微型无人机。
技术实现要素:
4.本发明的目的在于针对已有的技术现状,提供一种可压缩折叠的四轴飞行器。
5.本发明采用的技术方案是:
6.设计四轴无人飞行器的机臂末端为齿轮形,齿轮形中心位置预留有通孔,将四个机臂按末端齿轮配合安装,其中处于对角位置的两个机臂通过螺柱分别安装在两个舵机盘上,且在机臂与舵机盘接触面涂有粘合剂以确保二者之间不会出现相对偏移。两个舵机盘通过螺柱分别安装在两个舵机上,两个舵机分别嵌入安装在底座内,另外两个机臂通过螺柱安装在底座上,底座的舵机安装位置预留合适深度以保持四个机臂在同一水平面上,以实现四个机臂相互配合工作。并且四个配合好的机臂齿轮形中心通孔与机身底板预留通孔位置一致,四颗螺柱穿过机身底板连接机臂及舵机,底座部分,使其成为一个整体。为方便机臂的灵活转动,两个动力臂与机身底板使用螺柱连接时应采用间隙配合,两个从动臂与螺柱的连接也应为间隙配合。
7.该四轴折叠翼微型无人机通过飞行遥控器对舵机的旋转角度量的设置实现舵机带动两个机臂旋转设定角度,另外两个机臂在齿轮的带动下也旋转相同的设定角度,以实现四个机臂的折叠与展开。由舵机自带的自锁性保证机臂折叠状态和展开状态下工作位置的固定。
8.本发明结构简单,易于控制机臂旋转角度,可大幅降低四轴无人机所需的收纳空间,大大增加其便携性,折叠的自动性,在四轴无人机的折叠中具有较好的实用性。
附图说明
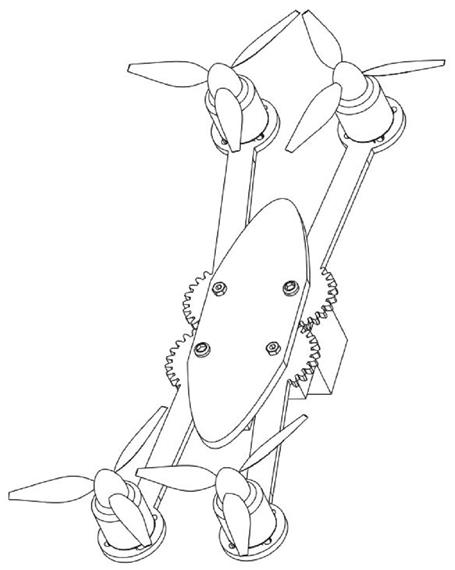
9.图1是本发明一种四轴折叠翼微型无人机的展开状态结构示意图。
10.图2是本发明一种四轴折叠翼微型无人机的折叠状态结构示意图。
11.图3是图1的侧视图。
12.图4是图1的仰视图。
13.图5是本发明一种四轴折叠翼微型无人机的底座结构示意图。
14.图6是本发明一种四轴折叠翼微型无人机的机臂俯视图。
15.图中:1.机臂,2.舵机,3.螺柱,4.底座,5.螺母,6.机身底板,7.舵机盘,8.垫片,9.拆卸孔,10.舵机穿线孔。
具体实施方式
16.下面结合附图对本发明做进一步说明。
17.本发明一种四轴折叠翼微型无人机主要由机臂1、舵机2、螺柱3、底座4、螺母5、机身底板6、舵机盘7、垫片8、拆卸孔9和舵机穿线孔10组成。所述的机臂1末端设计为齿轮形,齿轮形中心位置预留有通孔,将四个机臂1按末端齿轮配合安装,其中处于对角位置的两个机臂1通过螺柱3分别安装在两个舵机盘7上,且在机臂1与舵机盘7接触面涂有粘合剂以确保二者之间不会出现相对偏移。两个舵机盘7通过螺柱3分别安装在两个舵机2上,两个舵机2分别嵌入安装在底座4内,另外两个机臂1通过螺柱3安装在底座4上,底座4的舵机2安装位置预留合适深度以保持四个机臂1在同一水平面上,以实现四个机臂1相互配合工作。并且四个配合好的机臂1齿轮形中心通孔与机身底板6预留通孔位置一致,四颗螺柱3穿过机身底板6连接机臂1及舵机2,底座4部分,使其成为一个整体。为方便两个主动机臂1的灵活转动,机身底板6与螺柱3之间应采用间隙配合。同理,两个从动机臂1与螺柱3之间也应为间隙配合。
18.本发明一种四轴折叠翼微型无人机通过飞行遥控器对舵机2旋转角度量的设置实现舵机2带动两个机臂1旋转设定角度,另外两个机臂1在齿轮的带动下也旋转相同的设定角度,由此实现四个机臂1的折叠与展开。由舵机2的自锁性保证机臂1折叠状态和展开状态下工作位置的固定。
技术特征:
1.一种四轴折叠翼微型无人机,主要由机臂(1)、舵机(2)、螺柱(3)、底座(4)、螺母(5)、机身底板(6)、舵机盘(7)、垫片(8)、以及底座上的拆卸孔(9)、舵机穿线孔(10)组成,其特征在于:所述机臂(1)是末端为齿轮形的可相互配合的机臂,齿轮形的中心位置设有开孔便于螺柱(3)连接,其中处于对角位置的两个机臂(1)通过螺柱(3)与装有舵机盘(7)的舵机(2)连接为主动臂,其余两个机臂(1)通过螺柱(3)与底座(4)连接为从动臂,两个舵机(2)嵌入安装在底座(4)内。2.根据权利要求1所述的一种四轴折叠翼微型无人机,其特征在于:为保证机臂(1)的灵活转动,连接主动机臂(1)的螺柱(3)与机身底板(6)的连接孔应为间隙配合,连接从动机臂(1)的螺柱(3)与从动机臂(1)的连接孔应为间隙配合,主动机臂(1)通过螺柱(3)与装有舵机盘(7)的舵机连接。3.根据权利要求2所述的一种四轴折叠翼微型无人机,其特征在于:舵机盘(7)与主动机臂(1)的接触面还要采用粘合剂粘合以固定,使其在舵机(2)的转动过程中不会错位,从动机臂(1)的安装需加装垫片(8),使得四个机臂(1)在同一水平面工作。4.根据权利要求3所述的一种四轴折叠翼微型无人机,其特征在于:舵机(2)嵌入安装在底座(4)内,并且底座(4)设计有舵机线穿孔(10)和拆卸孔(9)方便安装和拆卸,设有放置螺母(5)的凹槽以便进一步固定从动机臂(1)的位置。
技术总结
本发明公开了一种四轴折叠翼微型无人机。为了增大微型无人机的便携性,实现微型无人机机翼的自动化折叠。本发明将四个机臂末端设计为相互配合的齿轮形,并使用舵机为其提供转动的动力和限制其转动的角度。四个机臂中有两个动力臂,通过螺柱连接两个舵机。其余两个机臂为从动臂依靠齿轮传动,通过螺柱安装在底座上。舵机嵌入安装在底座上,底座上设有舵机的拆卸孔和舵机穿线孔方便舵机的安装与拆卸。机身与整个折叠结构通过螺柱连接,并且为方便机臂的灵活转动,连接主动臂的螺柱与机身连接孔之间应为间隙配合,从动臂连接孔与螺柱之间也应为间隙配合。本发明结构简单,实现了无人机的自动化折叠,方便收纳,携带。携带。携带。
技术研发人员:严志平 华媛媛 屈念蒙 谢唯佳 王英子彤
受保护的技术使用者:西南石油大学
技术研发日:2021.11.18
技术公布日:2022/1/4