1.本发明涉及空间飞行器的技术领域,具体地,涉及空间飞行器舱门零重力平衡展收试验装置及使用方法。
背景技术:
2.空间飞行器在太空轨道工作时,其所处的重力环境与地球表面差异很大,如近地轨道飞行器在轨时几乎处于失重状态。对于一些空间飞行器在轨时,必须保证飞行器舱门在轨顺利展收到位,以便为后续航天员及货物载荷的进出舱试验提供窗口,虽然在轨的零重力状态可补偿舱门重量对其展收产生的阻力矩,但为舱门展收提供驱动力矩的铰链机构的可靠性,无疑是制约空间飞行器舱门在轨能否成功展收的核心因素。
3.在公告号为cn103587720b的专利文献中公开了一种空间飞行器对开式舱门展收机构,用于完成舱门的开闭动作,具有定位和制动功能,属于空间机构技术领域。该展收机构包括舱门隔框、舱门大梁、舱门锁、左舱门、右舱门、舱门防热结构、机体防热结构、机构驱动轴系、舱门铰链和机构连杆组件。所述的机构驱动轴系包括步进电机、减速器、绝对式测角器、测角器固定座、左轴承座、右轴承座、轴承座安装板、测角器联轴节、电机转接轴、支撑轴承和调节环。所述的机构连杆组件包括异型曲柄、连杆、舱门铰链座、关节球轴承、销轴螺钉。
4.为保证空间飞行器在轨时舱门的顺利展收,首先必须保证飞行器舱门展收驱动机构的可靠性,故在空间飞行器发射前的地面研制阶段,需模拟在轨时的零重力状态下充分验证驱动机构(铰链)驱动飞行器舱门顺利展收的可靠性。因此,需要设计并研制一套具备结构简单、操作方便、对舱门重力补偿充分、且旋转机构自身阻力矩小等特点的飞行器舱门零重力平衡展收试验工装,并对零重力状态设置到位后的驱动机构(铰链)驱动飞行器舱门顺利展收的可靠性进行充分验证,以便为空间飞行器舱门的零重力平衡展收试验提供一条新的方案。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种空间飞行器舱门零重力平衡展收试验装置及使用方法。
6.根据本发明提供的一种空间飞行器舱门零重力平衡展收试验装置,包括二维调节机构、旋转机构、吊梁、直线导轨、调节螺钉、钢丝绳、电子秤配重及安装螺钉;
7.所述二维调节机构与通用龙门架顶部连接,所述旋转机构与吊梁连接,且所述旋转机构与吊梁整体与二维调节机构连接;所述吊梁端部下方安装有直线导轨、调节螺钉及钢丝绳。
8.优选地,所述二维调节机构通过x向手动调节装置、y向手动调节装置进行平面内的二维手动调节。
9.优选地,所述旋转机构由上法兰、深沟球轴承、衬板、平面轴承、衬板、筒体、轴承挡
圈、下法兰及转轴组成;所述深沟球轴承位于平面轴承两端。
10.优选地,所述吊梁与旋转机构之间通过法兰刚性连接。
11.优选地,所述吊梁端部的直线导轨根据吊梁下方钢丝绳的受力方向自行移动,寻找并达到钢丝绳与舱门吊点的同轴。
12.本发明还提供一种空间飞行器舱门零重力平衡展收试验装置的使用方法,所述方法应用上述中的空间飞行器舱门零重力平衡展收试验装置,所述方法包括如下步骤:
13.步骤s1:二维调节机构与通用龙门架顶部连接;
14.步骤s2:采用激光跟踪仪精测并调节旋转机构达到要求的垂直度后,在吊梁两处钢丝绳下方放置理论计算后的配重;
15.步骤s3:在测试吊梁转动的初始阻力矩及过程阻力矩满足要求后,去除钢丝绳处的配重,并正式连接空间飞行器闭合状态下的舱门;
16.步骤s4:连接舱门前,调整吊梁下方两个调节螺钉留出等长的调节余量,且钢丝绳上电子秤均处于零位;
17.步骤s5:采用激光跟踪仪精测并调节舱门阻尼稳速机构的垂直度达到要求值;
18.步骤s6:通过对二维调节机构及舱门吊点的手动调节;
19.步骤s7:通过调节两端钢丝绳上端的调节螺钉使两处电子秤读数达到理论要求值;
20.步骤s8:状态精测调节到位后,空间飞行器舱门驱动机构铰链驱动下的零重力平衡展收。
21.优选地,所述步骤s1还包括旋转机构通过下法兰与吊梁法兰盘连接后再整体通过旋转机构上端法兰与二维调节机构底面中心法兰面连接。
22.优选地,所述步骤s2还包括采用精密拉力器在吊梁端部钢丝绳固定处,沿吊梁旋转的切线方向将吊梁缓慢平滑拉动一圈,测试吊梁转动的初始阻力矩及过程阻力矩。
23.优选地,所述步骤s4还包括将两根钢丝绳分别与舱门两端的吊点连接,通过调节螺杆使两端钢丝绳轻微拉紧,且电子秤处于相同的读数。
24.优选地,所述步骤s7在调整调节螺钉过程中连接舱门吊点的钢丝绳的垂直度会通过直线导轨的移动而自动调节到位。
25.与现有技术相比,本发明具有如下的有益效果:
26.1、本发明提供了一种空间飞行器舱门零重力平衡展收试验装置及使用方法,工装具有结构形式简单、操作方便、对舱门重力补偿充分、且自身阻力矩小等特点;
27.2、本发明可有效实现飞行器舱门的零重力平衡状态,并充分验证零重力状态下驱动机构铰链驱动飞行器舱门展收的可靠性;
28.3、本发明为空间飞行器舱门的零重力平衡展收试验提供了一条新的方案。
附图说明
29.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
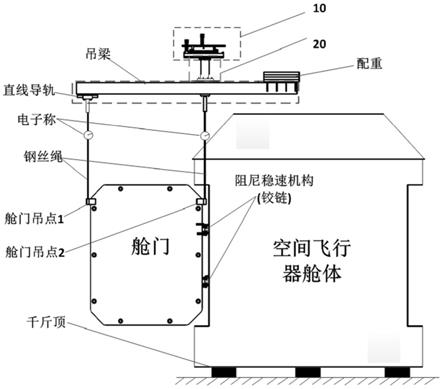
30.图1为本发明空间飞行器舱门零重力状态展收至90度位置示意图;
31.图2为本发明空间飞行器舱门零重力展收工装示意图;
32.图3为本发明空间飞行器舱门零重力展收工装旋转机构示意图。
33.其中:
34.二维调节机构10
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一衬板23
35.x向手动调节装置11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
平面轴承24
36.y向手动调节装置12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二衬板25
37.旋转机构20
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
筒体26
38.上法兰21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
轴承挡圈27
39.深沟球轴承22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
下法兰28
40.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转轴29
具体实施方式
41.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
42.本发明提供了一种空间飞行器舱门零重力平衡展收试验装置及使用方法,工装包括二维调节机构10、旋转机构20、吊梁、直线导轨、调节螺钉、钢丝绳、电子秤配重及安装螺钉;使用时,二维调节机构10与通用龙门架顶部连接,旋转机构20通过下法兰28与吊梁法兰盘连接后,再整体通过旋转机构20上端法兰与二维调节机构10底面中心法兰面连接,采用激光跟踪仪精测并调节旋转机构20达到要求的垂直度;随后在吊梁端部下方安装直线导轨、调节螺钉及钢丝绳,并在两处钢丝绳下方加载理论计算后的配重,采用精密拉力器在吊梁端部钢丝绳固定处,沿吊梁旋转的切线方向将吊梁缓慢平滑拉动一圈,在测试吊梁转动的初始阻力矩及过程阻力矩满足要求后,卸下钢丝绳处的配重,并正式连接空间飞行器闭合状态下的舱门。
43.连接舱门前,先调整吊梁下方两个调节螺钉留出等长的调节余量,且钢丝绳上电子秤均处于零位,再将两根钢丝绳分别与舱门两端的吊点连接,通过调节螺杆使两端钢丝绳轻微拉紧,且电子秤处于相同的读数;在舱门阻尼稳速机构的垂直度已调节到位的情况下,通过舱体下方的三个千斤顶调节,再通过二维调节机构10及舱门吊点的手动调节,保证旋转机构20、舱门吊点及阻尼稳速机构的同轴度满足精测指标要求,最后通过调节两端钢丝绳上端的调节螺钉使两处电子秤读数达到理论要求值,在调整调节螺钉过程中连接舱门吊点的钢丝绳的垂直度会通过直线导轨的移动而自动调节到位。上述状态精测调节到位后,可实现该空间飞行器舱门在阻尼稳速机构驱动下的零重力平衡展收,本实施例中阻尼稳速机构为铰链。
44.二维调节机构10可通过x向手动调节装置11、y向手动调节装置12完成平面内的二维手动调节,可有效实现旋转机构20与舱门吊点及阻尼稳速机构的同轴度,避免同轴度偏差给舱门展收产生阻力矩。
45.旋转机构20由上法兰21、深沟球轴承22、第一衬板23、平面轴承24、第二衬板25、筒体26、轴承挡圈27、下法兰28及转轴29组成。该旋转机构20对转轴29具有良好的轴向及径向承载能力,且两个深沟球轴承22位于平面轴承24两端的结构布局,既有效避免转轴29受偏
载时的挠度变形,也可使旋转机构20承受较小的旋转阻力矩。
46.吊梁与旋转机构20之间通过法兰的刚性连接方式,保证了即使在与舱门连接及理论配重施加状态下吊梁仍存在一定的偏载时,吊梁的旋转轨迹仍可保持在同一平面内,从而避免了吊梁弯曲给舱门展收带来阻力矩。
47.吊梁端部的直线导轨可根据其下方钢丝绳的受力方向来自行移动,并可靠寻找并达到钢丝绳与舱门吊点的同轴,从而有效避免了钢丝绳倾斜的吊挂力对阻尼稳速机构产生扭矩而导致舱门展收的阻力矩增大。
48.调节螺钉及电子秤的使用,可在有效调节钢丝绳拉紧长度的过程中,通过电子秤示数的监测来可靠保证吊挂系统对舱门理论重力的平衡,从而避免钢丝绳拉紧力无法平衡舱门重力而导致舱门展收的阻力矩增大。
49.一种空间飞行器舱门零重力平衡展收试验装置使用方法,包括如下步骤:
50.步骤s1:二维调节机构10与通用龙门架顶部连接,旋转机构20通过下法兰28与吊梁法兰盘连接后,再整体通过旋转机构20上端法兰与二维调节机构10底面中心法兰面连接。
51.步骤s2:采用激光跟踪仪精测并调节旋转机构20达到要求的垂直度后,在吊梁两处钢丝绳下方放置理论计算后的配重,并采用精密拉力器在吊梁端部钢丝绳固定处,沿吊梁旋转的切线方向将吊梁缓慢平滑拉动一圈,测试吊梁转动的初始阻力矩及过程阻力矩。
52.步骤s3:在测试吊梁转动的初始阻力矩及过程阻力矩满足要求后,去除钢丝绳处的配重,并正式连接空间飞行器闭合状态下的舱门。
53.步骤s4:连接舱门前,先调整吊梁下方两个调节螺钉留出等长的调节余量,且钢丝绳上电子秤均处于零位,再将两根钢丝绳分别与舱门两端的吊点连接,通过调节螺杆使两端钢丝绳轻微拉紧,且电子秤处于相同的读数。
54.步骤s5:采用激光跟踪仪精测并调节舱门阻尼稳速机构的垂直度达到要求值。
55.步骤s6:通过对二维调节机构10及舱门吊点的手动调节,保证旋转机构20、舱门吊点及阻尼稳速机构的同轴度满足精测指标要求。
56.步骤s7:通过调节两端钢丝绳上端的调节螺钉使两处电子秤读数达到理论要求值,在调整调节螺钉过程中连接舱门吊点的钢丝绳的垂直度会通过直线导轨的移动而自动调节到位。
57.步骤s8:上述状态精测调节到位后,可实现该空间飞行器舱门驱动机构铰链驱动下的零重力平衡展收。
58.本发明提供了一种空间飞行器舱门零重力平衡展收试验装置及使用方法,工装具有结构形式简单、操作方便、对舱门重力补偿充分、且自身阻力矩小等特点;可有效实现飞行器舱门的零重力平衡状态,并充分验证零重力状态下驱动机构铰链驱动飞行器舱门展收的可靠性;为空间飞行器舱门的零重力平衡展收试验提供了一条新的方案。
59.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可
以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
60.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
61.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。