1.本发明涉及无人机领域,具体为一种无人飞行器的起落架。
背景技术:
2.与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面是无人机真正的刚需;在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.无人机一般都配备有支撑底部的起落架,部分无人机采用固定起落架,另一部分采用可变动起落架,可变动起落架一般采用额外动力设备带动起落架进行升降或折叠,其中可变动起落架一般分为采用电机带动起落架折叠的电动折叠起落架,或采用液压杆折叠或伸缩的液压起落架。
4.但目前采用自动起落架的无人机在给螺旋桨提供动力的电机以外,还需要配备多个额外的电机或气缸来带动起落架升降,由于电机和气缸的重量较大,比较影响无人机整体的重量,使得无人机的续航时间减少,且由于整体重量的提高,无人机的惯性变大,操控变得更加困难,从而使无人机变得笨重;并且目前的无人机多需要人工手动操作控制键来控制无人机的起落架,当操作不熟练或疏忽时,容易导致在起落架未放下的情况下进行降落,进而导致无人机底部受损。
技术实现要素:
5.基于此,本发明的目的是提供一种无人飞行器的起落架,以解决目前起落架需要额外动力、需要人工操作的技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种无人飞行器的起落架,包括多组单元外壳,所述单元外壳内部设置有电机,所述电机内部贯穿有与其配合的电机轴,所述单元外壳内部滑动连接有起落架,所述电机轴下方设置有与其配合的连轴,所述连轴底部设置有第二离心盘,所述第二离心盘内部滑动连接有多组升降滑块,所述第二离心盘外侧转动连接有与所述升降滑块及所述起落架配合的升降滑环。
7.通过采用上述技术方案,设置的电机带动电机轴转动,通过电机轴带动螺旋桨、第一离心盘及连轴转动,通过起落架进行起落支撑,通过第二离心盘带动升降滑块转动,通过升降滑块带动升降滑环转动,通过升降滑环带动起落架升降。
8.本发明进一步设置为,所述电机轴顶部设置有螺旋桨。
9.通过采用上述技术方案,设置的螺旋桨使无人机可以飞行。
10.本发明进一步设置为,所述单元外壳外侧设置有连杆,多组所述单元外壳通过所述连杆连接有主体。
11.通过采用上述技术方案,设置的连杆使多组单元外壳与主体相连。
12.本发明进一步设置为,所述单元外壳底部铰接有多组底板,所述底板顶部设置有联动板,所述联动板两侧上端设置有凸起。
13.通过采用上述技术方案,设置的底板对单元外壳底部进行保护,避免飞行中有异物进入,通过联动板使底板跟随起落架进行同步开合,通过凸起使联动板与起落架滑槽滑动连接。
14.本发明进一步设置为,所述单元外壳内部设置有多组限位凸条,所述起落架外侧开设有多组与所述限位凸条及所述联动板配合的联动滑槽。
15.通过采用上述技术方案,设置的凸条与联动滑槽配合,使起落架只能上下滑动,不能转动。
16.本发明进一步设置为,所述起落架与所述单元外壳之间连接有支撑弹簧,所述起落架内侧上端开设有凹槽,所述凹槽上端设置有止推轴承。
17.通过采用上述技术方案,设置的支撑弹簧使起落架自动复位,并且在着陆时提供缓冲,通过止推轴承使起落架在收起时能加大部分受力传递至支撑滑块本发明进一步设置为,所述电机轴外侧设置有第一离心盘,所述第一离心盘内部滑动连接有一对与所述止推轴承配合的支撑滑块,所述支撑滑块与所述第一离心盘之间连接有第一弹簧。
18.通过采用上述技术方案,设置的第一离心盘转动支撑滑块转动,通过支撑滑块承载起落架升起时的下压力,通过第一弹簧使支撑滑块自动复位。
19.本发明进一步设置为,所述升降滑块与所述第二离心盘之间连接有第二弹簧,所述第二离心盘与所述升降滑环之间连接有多组转动轴承。
20.通过采用上述技术方案,设置的第二弹簧使升降滑块自动复位,通过转动轴承使第二离心盘与升降滑环转动连接。
21.本发明进一步设置为,所述起落架内壁上部设置有与所述升降滑环配合的螺纹段,所述起落架内壁下部设置有与所述升降滑环配合的平滑段。
22.通过采用上述技术方案,设置的螺纹段使起落架可以被升降滑环带动升降,通过平滑段使起落架升起至最高点后,升降滑环仍可以空转。
23.综上所述,本发明主要具有以下有益效果:1、本发明根据电机的转动自动调控起落架,当无人机起飞时,带动螺旋桨转动的电机,转速大幅提高,进而由电机轴带动连轴转动,从而带动第二离心盘转动,当第二离心盘转速较快时,升降滑块在离心力的作用下伸出,并与升降滑环契合,利用内部的齿槽契合带动升降滑环转动,进而带动起落架升起,免除了传统设备所需要的额外动力,使设备整体的重量减轻,进而提高无人机的续航能力,并使无人机更加的轻盈灵活;2、本发明降落时电机的转速下降,此时离心力不足以抗衡第二弹簧的拉力,升降滑块在第二弹簧的作用下回缩并脱离与升降滑环的契合,此时起落架在支撑弹簧的作用下自动弹出,进行着陆准备,避免了传统无人机需要人工手动操作起落架的弊端,使飞手操作无人机时,不用再分心操作起落架,能够更加专心的进行降落操作,也避免了忘记在降落前放下起落架而导致无人机底部受损的情况出现。
附图说明
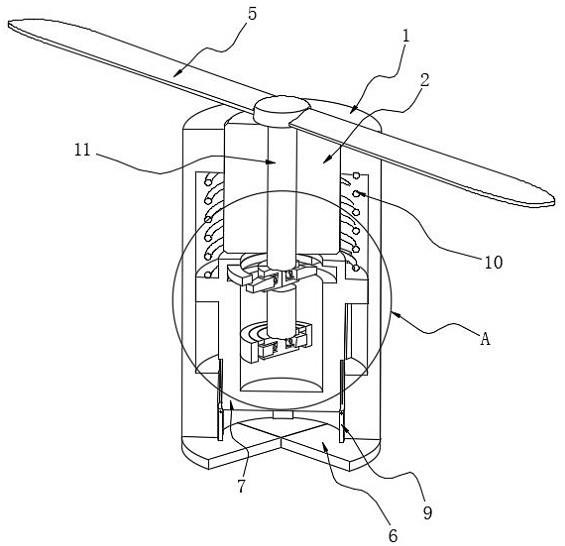
24.图1为本发明的内部剖视图;图2为本发明图1的a细节放大图;图3为本发明的整体示意图;图4为本发明的飞行单元示意图;图5为本发明的降落状态示意图;图6为本发明的底部支撑示意图。
25.图中:1、单元外壳;2、电机;3、连杆;4、主体;5、螺旋桨;6、底板;7、起落架;8、联动滑槽;9、联动板;10、支撑弹簧;11、电机轴;12、第一离心盘;13、止推轴承;14、支撑滑块;15、螺纹段;16、升降滑环;17、平滑段;18、第二离心盘;19、第二弹簧;20、升降滑块;21、转动轴承;22、连轴;23、第一弹簧。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
27.下面根据本发明的整体结构,对其实施例进行说明。
28.一种无人飞行器的起落架,如图1和图2所示,包括多组单元外壳1,单元外壳1内部设置有电机2,通过电机轴11带动螺旋桨5、第一离心盘12及连轴22转动,电机2内部贯穿有与其配合的电机轴11,单元外壳1内部滑动连接有起落架7,当需要降落时,电机2的转速下降,此时离心力不足以抗衡第二弹簧19的拉力,升降滑块20在第二弹簧19的作用下回缩并脱离与升降滑环16的契合,此时起落架7在支撑弹簧10的作用下自动弹出,使设备进入备降状态,电机轴11下方设置有与其配合的连轴22,连轴22底部设置有第二离心盘18,第二离心盘18内部滑动连接有多组升降滑块20,第二离心盘18外侧转动连接有与升降滑块20及起落架7配合的升降滑环16,当无人机起飞时,电机2的转速大幅提高,进而通过电机轴11带动连轴22转动,从而带动第二离心盘18转动,当第二离心盘18转速较快时,升降滑块20在离心力的作用下伸出,并与升降滑环16契合,利用内部的齿槽契合带动升降滑环16转动,进而带动起落架7升起。
29.请参阅图1,电机轴11顶部设置有螺旋桨5,飞行时通过电机2带动电机轴11,进而使螺旋桨5旋转,从而实现无人机的飞行功能。
30.请参阅图3,单元外壳1外侧设置有连杆3,多组单元外壳1通过连杆3连接有主体4,通过设置的连杆3使多组单元外壳1与主体4相连。
31.请参阅图5和图5,单元外壳1底部铰接有多组底板6,底板6顶部设置有联动板9,联动板9两侧上端设置有凸起,在起落架7升起的同时,联动板9两侧凸起在起落架7外侧滑槽中滑动,当凸起滑动至尽头时,起落架7带动联动板9转动,进而带动底板6合拢。
32.请参阅图2,单元外壳1内部设置有多组限位凸条,起落架7外侧开设有多组与限位凸条及联动板9配合的联动滑槽8,通过设置的凸条与联动滑槽8配合,使起落架7只能上下滑动,不能转动。
33.请参阅图2,起落架7与单元外壳1之间连接有支撑弹簧10,当需要降落时,电机2的
转速下降,此时离心力不足以抗衡第二弹簧19的拉力,升降滑块20在第二弹簧19的作用下回缩并脱离与升降滑环16的契合,此时起落架7在支撑弹簧10的作用下自动弹出,且弹出的同时带动底板6张开,使设备进入备降状态,起落架7内侧上端开设有凹槽,凹槽上端设置有止推轴承13,第一离心盘12在电机轴11的带动下,利用离心力使支撑滑块14滑出,进而使支撑滑块14插入止推轴承13底部,使起落架7的下压力通过止推轴承13传递至支撑滑块14,从而在止推轴承13的作用下减少起落架7对电机2转速的干扰。
34.请参阅图2,电机轴11外侧设置有第一离心盘12,第一离心盘12内部滑动连接有一对与止推轴承13配合的支撑滑块14,第一离心盘12在电机轴11的带动下,利用离心力使支撑滑块14滑出,进而使支撑滑块14插入止推轴承13底部,使起落架7的下压力通过止推轴承13传递至支撑滑块14,从而在止推轴承13的作用下减少起落架7对电机2转速的干扰,支撑滑块14与第一离心盘12之间连接有第一弹簧23,通过第一弹簧23使支撑滑块14自动复位。
35.请参阅图2,升降滑块20与第二离心盘18之间连接有第二弹簧19,通过设置的第二弹簧19使升降滑块20自动复位,第二离心盘18与升降滑环16之间连接有多组转动轴承21,通过转动轴承21使第二离心盘18与升降滑环16转动连接,并利用转动轴承21使升降滑环16与第二离心盘18之间的摩擦力降低。
36.请参阅图2,起落架7内壁上部设置有与升降滑环16配合的螺纹段15,当第二离心盘18转速较快时,升降滑块20在离心力的作用下伸出,并与升降滑环16契合,进而在螺纹段15的配合下使起落架7被升降滑环16带动升起,起落架7内壁下部设置有与升降滑环16配合的平滑段17,起落架7升起至顶部后升降滑环16进入平滑段17,此时升降滑环16开始空转,同时第一离心盘12在电机轴11的带动下,利用离心力使支撑滑块14滑出,进而使支撑滑块14插入止推轴承13底部,使起落架7的下压力通过止推轴承13传递至支撑滑块14,从而在止推轴承13的作用下减少起落架7对电机2转速的干扰。
37.本发明的工作原理为:先在主体4内部安装电源,通过电源进行供电,飞行时通过电机2带动电机轴11,进而使螺旋桨5旋转,从而实现无人机的飞行功能,使用时根据电机2的转动自动调控起落架7,当无人机起飞时,电机2的转速大幅提高,进而通过电机轴11带动连轴22转动,从而带动第二离心盘18转动,当第二离心盘18转速较快时,升降滑块20在离心力的作用下伸出,并与升降滑环16契合,利用内部的齿槽契合带动升降滑环16转动,进而带动起落架7升起,起落架7升起至顶部后升降滑环16进入平滑段17,此时升降滑环16开始空转,同时第一离心盘12在电机轴11的带动下,利用离心力使支撑滑块14滑出,进而使支撑滑块14插入止推轴承13底部,使起落架7的下压力通过止推轴承13传递至支撑滑块14,从而在止推轴承13的作用下减少起落架7对电机2转速的干扰,且在起落架7升起的同时,联动板9两侧凸起在起落架7外侧滑槽中滑动,当凸起滑动至尽头时,起落架7带动联动板9转动,进而带动底板6合拢,当需要降落时,电机2的转速下降,此时离心力不足以抗衡第二弹簧19的拉力,升降滑块20在第二弹簧19的作用下回缩并脱离与升降滑环16的契合,此时起落架7在支撑弹簧10的作用下自动弹出,且弹出的同时带动底板6张开,使设备进入备降状态。
38.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变
型等,但只要在本发明的权利要求范围内都受到专利法的保护。