1.本发明涉及一种飞行体的驱动装置,更加详细地涉及一种飞行体的驱动装置,使得施加了电流的磁性体沿着上下及左右方向旋转,从而可向着所期望的方向飞行。
背景技术:
2.通常,陆地及海上的移动、运输装置被大量的进行研究开发并用于实际生活,但在空中负责移动、运输的装置开发及现实化确实欠缺。
3.近来,以无人机为中心的用于小规模运输及/或摄影的飞行体被研究和开发,并活跃起来,但为了人类的移动,不存在可代替现有飞机的适当的装置。
4.尤其,以往一般的飞机都使用航空油等化石燃料,导致由于空气污染而引发的环境问题,并且为了驱动而使用发动机,由此存在伴有噪音、振动的问题,因此低噪音的环保飞行装置的必要性正在突显。
5.为此,研究出各种种类的飞行体,作为这种现有技术的一个例子,有飞行装置。
6.所述现有技术包括:主体部,其包括下部主体、上部主体及轻量部,其中,下部主体包括垂直排出口,垂直排出口将从外部流入内部的空气向下部方向排出,上部主体位于下部主体的上部,轻量部包括磁性磁铁和线圈,磁性磁铁和线圈分别设置于上部主体和下部主体,选择性地发挥彼此斥力,使得上部主体和下部主体的重量减轻;主风扇,其设置于主体部的下部主体,为了在主体部产生浮力,使得外部的空气流入主体的内部,因此构成为在不使用石油等燃料的情况下实现运输,从而可减少环境污染。
7.但所述现有技术形成为很难实现实际飞行的结构,例如,以借助于主风扇从下部主体的下部吸入空气后再次朝下部排出的形式构成,叶片的旋转通过被太阳能模块转换的电源而实现,因此问题在于,在太阳照射不到的夜间很难运行。
8.磁铁是指,把吸引铁片或对电流起作用的性质称为磁性,那么具有这种磁性的物体则称为磁铁,磁铁根据外部磁场的磁性可分为暂时磁铁和永久磁铁。
9.换句话说,暂时磁铁如同电磁铁的铁芯,如果去除外部磁场就会失去磁性,而永久磁铁一旦具有磁性,即使去除外部磁场也会长时间保持磁性。按照磁铁的形态进行分类的话,可分为以条状形成的条形磁铁、u字形马蹄磁铁等,此外还有磁针,其像指南针一样可以使得小型的永久磁铁在水平面上自由旋转。
10.另外,即使将磁铁一分为二,也分别保持作为磁铁的性质,即使在此基础上再将磁铁一分为二,各片段也会继续保持磁性。像这样,磁铁无论怎么分割,总是会呈现出磁性。
11.并且,电磁铁是指在软铁芯周围缠上好几层不通电的线圈,虽然是只在线圈通过电流时才出现磁力的暂时磁铁,但能够获得比永久磁铁更强的磁力。
12.另外,优点在于,还可以根据电流的强度调节磁力的强度。
13.由于这种理由,电磁铁广泛应用于电话听筒、粒子加速器等需要强磁场的领域。
14.这种磁铁和电磁铁正在广泛用于整个事业中,其原理也普遍化了。
15.尤其,可以说是马达或发电机的基本原理。
16.另外,随着科学技术的发展,如磁悬浮列车一样,列车可以利用磁场在空中悬浮的状态下行驶。
17.同时,通常浮力意味着展翅飞翔的鸟从空气中获得支撑其体重的力,飞向高空的大型喷气式飞机也从空气中获得支撑数百吨重量的力。
18.像这样,在流体内水平运动的物体从流体中获得的、朝向相对于行进方向垂直的上侧的力称为浮力。
19.例如,飞机的机翼截面是速度较快时从流体受到的阻力最小的形状,即,流线型,但上面和下面速度较慢,因此机翼下面所受的压力比上面所受的压力更大,因此机翼利用这个压力差异,从下往上升。
20.还有飞行体通常是指用于飞上天的器具,这种飞行体一般指飞机、直升机等飞行体。
21.这种飞行体为了产生用于飞上天的推进力,借助于螺旋桨旋转产生浮力或引擎的推进力和翅膀产生的浮力在天空飞行。
22.尤其,直升机可以借助于螺旋桨旋转产生的浮力垂直飞行。
23.但是,就现有的螺旋桨而言,由于通过发动机的驱动使得螺旋桨旋转,因此其大小较大,噪音及燃料的消耗较大。
24.例如,以下专利文献1中公开了一种“利用磁铁产生浮力的飞行体”。
25.根据以下专利文献1的利用磁铁产生浮力的飞行体包括:本体,其形成可少受空气阻力的流线的圆形,并且设置有在外周周围上排列有多个磁铁及电磁铁的连接部;旋转机翼,其设置于所述本体外周面,至少2个以上机翼形状的机翼形成为一体,设置有在内侧周围以与所述连接部相对应的形式排列有磁铁的旋转部,所述本体的连接部形成为或形状,所述旋转机翼的旋转部以与所述连接部相互对应的形式形成为或者形状。
26.电磁铁以形成圆形带形态的形式排列在所述本体的连接部中央,永久磁铁在上、下部以圆形带或等间隔的形式设置,所述旋转机翼的旋转部还包括永久磁铁,其以与所述连接部相对应的形式以圆形带或等间隔的形态排列;在本体内设置有发电部、供给部、控制部,其中,发电部由生成电源的发电机或电池构成,供给部借助于所述发电部获得电源的供给后,供给电源到连接部的电磁铁,控制部控制所述发电部和供给部;还设置有发电装置,其可在旋转机翼旋转时实现发电,并且设置有充电部,其用借助于所述发电装置自我发电得到的电进行充电。
27.就所述发电部而言,本体连接部的形成圆形带或等间隔的电磁铁中的一部分或永久磁铁中的一部分,以等间隔排列的形式设置有用于发电的线圈,当旋转机翼进行驱动时,不向电磁铁中的一部分供给电源,或者借助于线圈以等间隔的形式排列的永久磁铁,能够在旋转机翼进行旋转时实现发电,所述旋转机翼的旋转部以与所述本体的连接部相对应的形式隔开规定的距离,并以间隔开的形式结合,从而借助于永久磁铁磁力引起的推拉来保持平衡的同时,形成相互规定的间隔,使旋转机翼以无摩擦地可旋转的形式固定。
28.以下专利文献2中公开了“飞行体”。
29.根据以下专利文献2的飞行体包括:环形的外侧主体,其外周侧侧面一部分和中心侧侧面一部分沿着周围贯通形成;叶片部,其包括至少一个以上的叶片,以可旋转的形式设
置于所述外侧主体的内部,以通过旋转使得空气从所述外侧主体的外周侧侧面移动到中心侧侧面的形式形成;第一磁力装置,其包括分别设置于外侧主体及叶片部的磁性体,所述叶片部借助于磁力与外侧主体保持间隔,实现悬浮状态;第二磁力装置,其包括设置于所述外侧主体的电磁铁和设置于叶片部的磁性体,使得叶片部通过磁力进行旋转;中心侧主体,其包括控制部和电源供给部,其中,控制部设置为被所述外侧主体的中心侧侧面包围的形态,控制所述叶片部的旋转和转向部的动作,电源供给部供给电源给所述控制部及电磁铁;以及转向部,其沿着中心侧主体的周围设置于外侧,以使得借助于所述叶片部移动并向外侧主体的中心侧侧面排出的空气向上或向下可排出的形式构成。
30.【先行技术文献】
31.【专利文献】
32.(专利文献0001)韩国专利公开号第10-2015-0057364号
33.(专利文献0002)韩国专利登记号第10-1716430号
34.(专利文献0003)韩国专利公开号第10-2019-0012848号
技术实现要素:
35.本发明的目的是用于解决如上所述的问题,提供一种飞行体的驱动装置,可借助于随着向磁性体供给的电流的方向产生的力使得飞行体驱动。
36.本发明的另一个目的在于提供一种飞行体的驱动装置,使得获得电流供给的磁性体朝上下及左右方向旋转,可对因电流产生的力的方向进行控制。
37.为了实现如上所述的目的,根据本发明的飞行体的驱动装置,其包括以可少受空气阻力的流线型形成的飞行体本体10,飞行体的驱动装置的特征在于,包括:支撑部件20,其以可旋转的形式设置于所述飞行体本体10的内部;第一旋转操作部30,其沿着一个方向设置于所述支撑部件;第二旋转操作部40,其沿着与第一旋转操作部30相交叉的方向设置;以及磁性体50,其借助于所述第一旋转操作部30和第二旋转操作部40沿着上下方向及左右方向旋转。
38.特征在于,所述第一旋转操作部30以所述支撑部件20为基准以可旋转的形式设置,所述第二旋转操作部40以所述第一旋转操作部为基准以可旋转的形式设置,为了能够使得所述磁性体50沿上下及左右方向旋转,所述第一旋转操作部30及所述第二旋转操作部40沿着相互交叉的方向设置。
39.第一旋转操作部30包括:第一旋转轴31,其以可旋转的形式设置于所述支撑部件20;第一旋转马达32,其为了使得所述第一旋转轴31能够旋转,设置于所述第一旋转轴31的一侧;半球旋转体35,其在所述第一旋转轴31使得所述第二旋转操作部40能够旋转,
40.所述第一旋转操作部30借助于第一旋转马达32以支撑部件20为基准往返旋转180
°
。
41.特征在于,第二旋转操作部40包括:半球旋转体35,其以可旋转的形式设置于第一旋转操作部30;第二旋转轴41,其以可旋转的形式设置于所述半球旋转体35的上部;第二旋转马达42,其为了使得所述第二旋转轴41能够旋转,设置于第二旋转轴41的一侧。
42.所述第二旋转操作部40借助于第二旋转马达42以第一旋转操作部30为基准往返旋转180
°
。
43.所述磁性体50包括:半球旋转体51,其设置于第二旋转操作部40的上部;电流体52,其设置于所述半球旋转体51内,并获得电流的供给;第一极磁性体53,其以所述电流体52为基准设置于电流体52的一侧;第二极磁性体54,其以电流体52为基准设置于电流体52的另一侧;以及连接部55,其连接于第一极磁性体53和第二极磁性体54之间。
44.如上所述,根据本发明的飞行体的驱动装置,可以以支撑部件为基准使得第一旋转操作部旋转,可以以第一旋转操作部为基准使得第二旋转操作部旋转,通过这些旋转操作部可以使磁性体朝所期望的方向及角度旋转,从而达到可以使磁性体向所期望的方向及角度旋转的效果。
45.另外,根据本发明的飞行体的驱动装置,向磁性体施加电流,能够产生电流引起的力,由此达到可以使飞行体朝着所期望的方向和角度飞行的效果。
附图说明
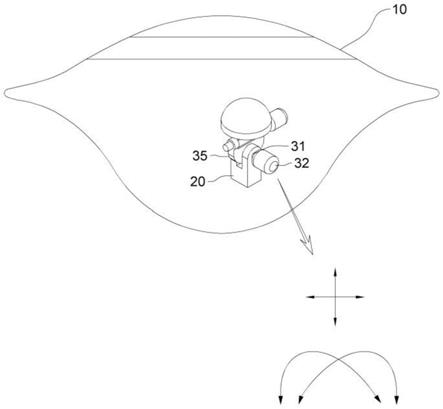
46.图1是概略地示出根据本发明的优选实施例的飞行体的驱动装置的立体图。
47.图2是概略地示出根据本发明的优选实施例的飞行体的驱动装置的正面图。
48.图3是概略地示出根据本发明的优选实施例的飞行体的驱动装置的侧面图。
49.图4是示出根据本发明的优选实施例的飞行体的驱动装置的立体图。
50.图5是示出根据本发明的优选实施例的飞行体的驱动装置的正面图。
51.图6是示出根据本发明的优选实施例的飞行体的驱动装置的底面立体图。
52.图7是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的平面图。
53.图8是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的正面图。
54.图9是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的侧面图。
55.标号说明
56.10:飞行体本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:支撑部件
57.21:本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22:结合孔
58.23:旋转空间部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30:第一旋转操作部
59.31:第一旋转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32:第一旋转马达
60.35:半球旋转体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40:第二旋转操作部
61.41:第二旋转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42:第二旋转马达
62.50:磁性体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51:半球旋转体
63.52:电流体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53:第一极磁性体
64.54:第二极磁性体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
55:连接部
具体实施方式
65.下面以附图为参考,为了使得在本发明所属的技术领域中具有一般知识的人可以容易地实施,对本发明的实施例进行详细说明。
66.但是,关于本发明的说明只不过是用于结构性或者功能性说明的实施例,因此本
发明的权利范围不能被解释为受本文说明的实施例的限制。
67.例如,由于实施例可以进行多样的变更,而且可以拥有多种形态,因此本发明的权利范围应该被理解为包括能够实现技术性思想的均等物。
68.另外,在本发明中提出的目的或效果,并不意味着特定实施例必须包含所有这些目的或者效果,或仅包括那样的效果,因此本发明的权利范围不应受此限制。
69.在本说明书中,本实施例使本发明的公开完整,是为了向本发明所属的技术领域中具有一般知识的人完整地告知发明的范畴而提供的。并且,本发明仅通过权利要求的范畴来定义。
70.因此,在几个实施例中,为了避免本发明被模糊地解释,不对熟知的构成要素、熟知的动作及熟知的技术进行具体的说明。
71.下面,参照附图对本发明的优选实施例的飞行体的驱动装置进行详细的说明。
72.根据本发明的优选实施例的飞行体的驱动装置,包括以可少受空气阻力的流线型形成的飞行体本体10,所述飞行体的驱动装置包括:支撑部件20,其以可旋转的形式设置于所述飞行体本体10的内部;第一旋转操作部30,其沿着一个方向设置于所述支撑部件;第二旋转操作部40,其沿着与第一旋转操作部30相交叉的方向设置;磁性体50,其借助于所述第一旋转操作部30和第二旋转操作部40沿着上下方向及左右方向旋转。
73.图1是概略地示出根据本发明的优选实施例的飞行体的驱动装置的立体图,图2是概略的示出根据本发明的优选实施例的飞行体的驱动装置的正面图,图3是概略地示出根据本发明的优选实施例的飞行体的驱动装置的侧面图。
74.如图1至图3所示,根据本发明的实施例的飞行体的驱动装置设置在飞行体本体10内,产生飞行体本体10可以飞行的力。
75.所述飞行体本体10是飞机、无人机等实现飞行的总称,在所述飞行体本体10内部设置有磁性体50,以便借助于施加的电流实现飞行体本体10的飞行。
76.图2是示出根据本发明的优选实施例的飞行体的驱动装置的立体图,图3是示出根据本发明的优选实施例的飞行体的驱动装置的正面图,图4是示出根据本发明的优选实施例的飞行体的驱动装置的底面立体图,
77.图3至图5是示出根据本发明的实施例的飞行体的驱动装置,图3是示出驱动装置的立体图,图4是示出驱动装置的正面图,图5是示出驱动装置的底面立体图。
78.设置有支撑部件20,以便所述飞行体本体10和驱动装置以相互稳定的形式设置。
79.当然,所述支撑部件20在飞行体本体10的内部可自由地设置于后尾部位或中央部位等想要设置的位置。
80.所述驱动装置包括:支撑部件20;第一旋转操作部30,其以可旋转的形式设置于所述支撑部件20;第二旋转操作部40,其以第一旋转操作部30为基准沿着交叉的方向设置;以及磁性体50,其借助于所述第一旋转操作部30和第二旋转操作部40调节力的方向,并借助于所述第一旋转操作部30和第二旋转操作部40沿着上下方向及左右方向旋转。
81.所述支撑部件20包括:本体21,其以规定的高度设置;结合孔22,其形成于所述本体21的上面,以便设置第一旋转操作部30;旋转空间部23,其形成为使得第一旋转操作部30以可旋转的形式设置。
82.在所述本体21的上面形成有结合孔22,以便使得第一旋转操作部30以可旋转的形
式设置,在所述本体21的上部以使得第一旋转操作部30能够旋转的形式形成有旋转空间部23。
83.换句话说,所述旋转空间部23的截面大致形成为“u”字形状,第一旋转操作部30的半球旋转体35以可旋转的形式设置在所述旋转空间部23。
84.另一方面,所述第一旋转操作部30以所述支撑部件20为基准以可旋转的形式设置,所述第二旋转操作部40以所述第一旋转操作部为基准以可旋转的形式设置,为了使得所述磁性体50能够沿上下及左右方向旋转,所述第一旋转操作部30及所述第二旋转操作部40沿相互交叉的方向设置。
85.所述第一旋转操作部30在与支撑部件20相交叉的方向上设置,所述第二旋转操作部40在相对于第一旋转操作部30交叉的方向上设置。
86.如图1所示,所述第一旋转操作部30如箭头所示,朝水平方向旋转,所述第二旋转操作部40朝垂直方向旋转。
87.同时,所述第一旋转操作部30以180
°
的角度进行往返旋转,第二旋转操作部40以180
°
的角度进行往返旋转。
88.如图2至图4所示,在所述支撑部件20的结合孔22以可旋转的形式设置有第一旋转操作部30。
89.所述第一旋转操作部30包括:第一旋转轴31,其以可旋转的形式设置于所述支撑部件20;第一旋转马达32,其为了使得所述第一旋转轴31能够旋转,设置于所述第一旋转轴31的一侧;半球旋转体35,其在所述第一旋转轴31使得所述第二旋转操作部40能够旋转,所述第一旋转操作部30借助于第一旋转马达32以支撑部件20为基准往返旋转180
°
。
90.第一旋转操作部30的第一旋转轴31以可旋转的形式结合在所述结合孔22,在所述第一旋转轴31的一端设置有第一旋转马达32。
91.另外,在所述第一旋转轴31设置有大概以半圆形状形成的半球旋转体35,所述半球旋转体35借助于第一旋转轴31以180
°
的角度进行往返旋转。
92.在所述半球旋转体35的上部设置有第二旋转操作部40。
93.第二旋转操作部40包括:半球旋转体35,其以可旋转的形式设置于第一旋转操作部30;第二旋转轴41,其以可旋转的形式设置于所述半球旋转体35的上部;第二旋转马达42,其为了使得所述第二旋转轴41能够旋转,设置于第二旋转轴41的一侧,所述第二旋转操作部40借助于第二旋转马达42以第一旋转操作部30为基准往返旋转180
°
。
94.在所述半球旋转体35的上部以可旋转的形式设置有第二旋转操作部40,在所述半球旋转体35以可旋转的形式设置有第二旋转操作部40的第二旋转轴41,在所述第二旋转轴41的一侧设置有第二旋转马达42。
95.同时,在所述第二旋转操作部40的上部设置有磁性体50。
96.图7是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的平面图,图8是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的正面图,图9是示出在根据本发明的优选实施例的飞行体的驱动装置设置的磁性体的侧面图。
97.所述磁性体50包括:半球旋转体51,其设置于第二旋转操作部40的上部;电流体52,其设置于所述半球旋转体51内,并获得电流的供给;第一极磁性体53,其以所述电流体52为基准设置于电流体52的一侧;第二极磁性体54,其以电流体52为基准设置于电流体52
的另一侧;以及连接部55,其连接于所述第一极磁性体53和第二极磁性体54之间。
98.如图7至图9所示,根据本发明的实施例的飞行体的驱动装置包括以半球形状形成的半球旋转体51和在所述半球旋转体51内部设置的磁性体50。
99.换句话说,所述半球旋转体51形成为内部空的中空形状,在其内部设置有电流流动的电流体52。
100.所述电流体52形成为一字形,在所述电流体52的一侧设置有第一极磁性体53,在所述电流体52的另一侧设置有第二极磁性体54。
101.所述第一极磁性体53由n极组成,第二极磁性体54由s极组成。
102.另一方面,在所述第一极磁性体53和第二极磁性体54之间,连接部55以一体的形式连接,以便保持第一极磁性体53和第二极磁性体54以稳定的形式设置的状态。
103.以下对根据本发明的优选实施例的飞行体的驱动装置的结合关系进行说明。
104.正如图1至图9所示,根据本发明的实施例的飞行体的驱动装置,当借助于在飞行体本体10内沿上下及左右方向进行旋转的第一旋转操作部30和第二旋转操作部40使得磁性体50朝所期望的方向旋转时,通过施加至磁性体50的电源来实现飞行。
105.在所述飞行体本体10内部设置有驱动装置,所述驱动装置以使得第一旋转操作部30和第二旋转操作部40能够沿相互交叉的方向旋转的形式设置于支撑部件20。
106.这些第一旋转操作部30和第二旋转操作部40使得设置于第二旋转操作部40的磁性体50向水平及垂直方向旋转,由此可以利用电流产生的力使得飞行体飞行。
107.换句话说,在所述飞行体本体10内部设置有支撑部件20,在所述支撑部件20的旋转空间部23以可旋转的形式设置有第一旋转操作部30的第一旋转轴31。
108.所述第一旋转轴31借助于设置在一侧的第一旋转马达32进行旋转,如图4至图6所示,所述第一旋转操作部30设置为沿着以支撑部件20为基准交叉的方向可借助于第一旋转马达32进行旋转。
109.同时,在所述第一旋转操作部30的上部设置有第二旋转操作部40,所述第二旋转操作部40设置在与第一旋转操作部30交叉的方向上。
110.这是为了使得设置在第二旋转操作部40上部的磁性体50能够朝上下及左右方向旋转。
111.换句话说,第一旋转操作部30和第二旋转操作部40可以使得磁性体50朝所期望的方向旋转,从而对施加至磁性体50的电流产生的力的方向进行调节。
112.另一方面,所述第一旋转操作部30以支撑部件20为基准,在180
°
的角度内以可旋转的形式设置,第二旋转操作部40以第一旋转操作部30为基准,在180
°
的角度内以可旋转的形式设置。
113.像这样,磁性体50不仅借助于第一旋转操作部30和第二旋转操作部40朝上下及左右方向自由旋转,而且借助于第一旋转轴31和第二旋转轴41在相互交叉的180
°
的角度内自由旋转。
114.换句话说,所述磁性体50与图1一样,不仅朝水平及垂直方向旋转,而且以各旋转轴31、41为基准进行旋转,因此以虚拟的水平面为基准,在半球形状内自由旋转。
115.如图7至图9所示,所述磁性体50设置有电流体52,电流从电池(未示出)传导至电流体52,在所述电流体52的一侧设置有第一极磁性体53,在电流体52的另一侧设置有第二
极磁性体54。
116.从电池施加的电流在所述电流体52中流动,根据电流流动的方向,通过弗莱明右手定则产生力f。
117.所述磁性体50不仅借助于第一旋转操作部30和第二旋转操作部40沿着上下及左右或垂直及水平方向旋转,而且以虚拟的水平面为基准,在半球形状内进行旋转。
118.因此,借助于随着电流体52产生的力,可以使得飞行体本体10朝着所期望的方向飞行。
119.虽然以上是根据所述实施例对由本发明人完成的发明进行的具体说明,但本发明并不限于所述实施例,当然可以在不脱离其要旨的范围内进行多种变更。