1.本发明涉及无人机技术领域,具体为一种基于物联网的用于交通管理的智能无人机。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,无人机按应用领域,可分为军用与民用,民用方面,无人机+行业应用,是无人机真正的刚需,目前在航拍、农业、植保、微型自拍、灾难救援、观察野生动物、影视拍摄、交通管理等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.现有的无人机在交通管理方面有较大的利用空间,但现有的无人机设备在遇到交通系统瘫痪时,需要持续性飞行进行交通指挥,无法固定在信号灯上,导致其消耗较多的电量,不能够长时间进行交通指挥,且当不同路口下需要使用到不同的摄像头,现有的无法对不同的摄像头进行快速的更换,导致其使用具有局限性,所以我们提出一种基于物联网的用于交通管理的智能无人机。
技术实现要素:
4.针对现有技术的不足,本发明公开了一种基于物联网的用于交通管理的智能无人机,以解决上述背景技术中提出的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种基于物联网的用于交通管理的智能无人机包括:外壳,所述外壳的两侧均固定连接有两个旋翼连接轴,所述旋翼连接轴的上表面固定连接有旋翼,所述外壳的上方设置有临时信号灯,所述外壳的下方设置有两个固定块;升降组件,升降组件包括双向丝杆,所述双向丝杆转动连接在外壳的内壁上,所述双向丝杆上下方分别设置有下移动座和上移动座;两个固定组件,固定组件包括转动伞齿轮,所述转动伞齿轮的内壁上固定插接有转动杆,所述转动杆转动连接在外壳的内壁上;限位组件,限位组件包括双向螺纹杆,所述双向螺纹杆转动连接在下移动座的内壁上,所述双向螺纹杆外表面螺纹连接有两个夹紧块。
6.两个缓冲组件,转动组件包括固定轴,所述固定轴滑动连接在外壳的侧面。
7.优选的,所述外壳的下方设置有两个固定块,两个所述固定块的上表面均固定连接有两个连接块,所述连接块的上表面与外壳的下表面固定连接,所述上移动座和下移动座的两侧固定连接有两个滑块,所述上移动座和下移动座通过两侧的滑块滑动连接在外壳的内壁上,所述外壳的两侧设置有两个支撑架,两个所述支撑架分别滑动连接在外壳的两侧,所述临时信号灯固定连接在上移动座的上表面,所述下移动座的下方固定连接有摄像头。
8.优选的,所述上移动座的下表面固定连接有两个上移动块,所述下移动座的上表面固定连接有两个下移动块,所述上移动块和下移动块的内部分别固定连接有上连接轴和下连接轴,所述上连接轴和下连接轴的外表面分别转动连接有上连接杆和下连接杆,所述双向丝杆的外表面螺纹连接有两个第一螺母座,所述第一螺母座的上下端均固定连接有移动连接轴,所述上连接杆和下连接杆的另一端均转动连接在移动连接轴的外表面。
9.优选的,所述双向丝杆的外表面固定套接有从动伞齿轮,且从动伞齿轮处于双向丝杆的中心位置,所述从动伞齿轮的外表面啮合有主伞齿轮,所述外壳的内壁上固定连接有支撑座,所述支撑座的上表面固定连接有电机,所述电机的输出端与主伞齿轮固定套接,所述双向丝杆的外表面开设有旋向相反的螺纹槽,两个所述第一螺母座分别螺纹连接在旋向相反的螺纹槽内壁上,所述双向丝杆的前后两端分别固定套接有连动伞齿轮,两个所述连动伞齿轮通过双向丝杆转动连接在外壳的内部。
10.优选的,所述连动伞齿轮与转动伞齿轮相啮合,所述转动杆的另一端转动连接在固定块的上表面,所述转动杆的外表面固定套接有主齿轮,所述主齿轮通过转动杆转动连接在固定块的内部,所述主齿轮的外表面啮合有两个齿条,两个所述齿条相反的一侧均固定连接有第一限位块,所述第一限位块滑动连接在固定块的内壁上,所述齿条的下表面固定连接有连接条,所述连接条贯穿固定块的下表面向外延伸,且延伸的一端固定连接弧形夹块,两个所述弧形夹块对称分布在固定块的下方。
11.优选的,所述双向螺纹杆贯穿下移动座的正面向外延伸,且延伸的一端固定连接有第二转轮,所述双向螺纹杆的外表面螺纹连接有两个第二螺母座,所述双向螺纹杆的外表面开设有旋向相反的螺纹槽,两个所述第二螺母座分别螺纹连接在两个旋向相反的螺纹槽的内壁上,且两个所述第二螺母座均滑动连接在下移动座的下表面,所述第二螺母座的下表面与夹紧块的上表面固定连接。
12.优选的,两个所述夹紧块相对的一侧均固定连接有连接座,所述连接座的上表面与下移动座的下表面相贴合,所述夹紧块的相对的一侧均开设有第一限位槽,所述第一限位槽的内壁上滑动连接有第二限位块,两个所述第二限位块相对的一侧均固定连接有移动夹块,所述第二限位块的内壁上螺纹连接有单向螺纹杆,所述单向螺纹杆转动连接在夹紧块的内壁上。
13.优选的,所述单向螺纹杆贯穿夹紧块的下表面向外延伸,且延伸的一端固定连接有第一转轮,所述连接座的下表面开设有第二限位槽,所述第二限位槽的内壁上滑动连接有两个第三限位块,所述第三限位块的下表面固定连接有弹性移动块,两个所述第三限位块之间固定连接有第一弹簧,且所述第一弹簧处于拉伸状态。
14.优选的,所述固定轴的前后两端均固定连接有连接滑块,所述连接滑块滑动连接在外壳的内壁上,所述连接滑块的内壁上滑动连接有限位杆,所述限位杆固定连接在外壳的内壁上,所述限位杆的外表面套接有第二弹簧,所述第二弹簧的一端固定连接在连接滑块的上表面,且另一端固定连接在外壳的内壁上,所述第二弹簧始终处于压缩状态,所述固定轴的外表面与支撑架转动连接,所述另一端固定连接有螺纹连接轴,所述螺纹连接轴的前后均两端螺纹连接有缓冲块。
15.本发明公开了一种基于物联网的用于交通管理的智能无人机,其具备的有益效果如下:
(1)该基于物联网的用于交通管理的智能无人机,通过设置的升降组件和固定组件的作用下,从而使得上移动座和下移动座进行移动,从而使得临时信号灯和摄像头处于外界,从而进行交通疏导,在电机带动双向丝杆进行转动的同时,此时两个弧形夹块相向移动,对交通信号灯杆进行夹紧,从而使得外壳固定连接在交通信号灯杆上,此时即可停止旋翼的转动,使得其能够减小电量的消耗,便于进行长时间的交通疏导。
16.(2)该基于物联网的用于交通管理的智能无人机,在限位组件的作用下,两个移动夹块与摄像头相分离,再通过转动第二转轮使得夹紧块和弹性移动块与摄像头相分离,此时即可取下摄像头,当需要更换上摄像头时,进行上述相反运动,当夹紧块移动到合适的位置时,同时在第一弹簧的作用下,使得摄像头处于中心位置,此时通过反向转动第一转轮,使得两个移动夹块对摄像头进行夹紧固定,从而完成的对不同型号的摄像头的快速安装和拆卸。
17.(3)该基于物联网的用于交通管理的智能无人机,在缓冲组件的作用下,当外壳回落到地面时,首先缓冲块与地面接触,从而使得两个连接滑块受到力向上移动,随着连接滑块移动,从而使得第二弹簧被压缩,此时在第二弹簧的反作用力下,使得外壳的下移受到缓冲保护,当其落地平稳后,不受外界因素时,第二弹簧进行反弹,使得第二弹簧只受到外壳的重力作用,维持平稳状态,从而使得外壳落地时受到保护。
附图说明
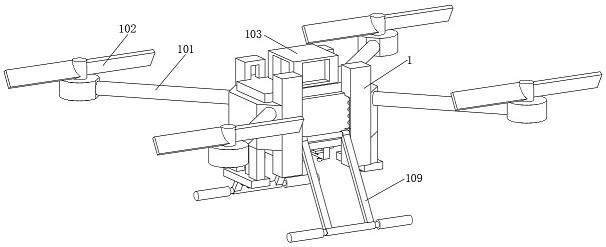
18.图1为本发明实施例中的无人机结构示意图。
19.图2为本发明实施例中的无人机的剖视图。
20.图3为本发明实施例中的升降组件结构示意图。
21.图4为本发明实施例中的升降组件爆炸图。
22.图5为本发明实施例中的升降组件拆分示意图。
23.图6为本发明实施例中的固定组件示意图。
24.图7为本发明实施例中的固定组件拆分示意图。
25.图8为本发明实施例中的限位组件结构示意图。
26.图9为本发明实施例中的限位组件爆炸图。
27.图10为本发明实施例中的限位组件拆分示意图。
28.图11为本发明实施例中的限位组件缓冲组件示意图。
29.图中:1、外壳;101、旋翼连接轴;102、旋翼;103、临时信号灯;104、摄像头;105、连接块;106、固定块;107、上移动座;108、下移动座;109、支撑架;2、双向丝杆;201、从动伞齿轮;202、主伞齿轮;203、电机;204、第一螺母座;205、移动连接轴;206、上连接杆;207、下连接杆;208、上连接轴;209、下连接轴;210、上移动块;211、下移动块;212、支撑座;3、转动伞齿轮;301、转动杆;302、主齿轮;303、齿条;304、第一限位块;305、连接条;306、弧形夹块;307、连动伞齿轮;4、双向螺纹杆;401、第二螺母座;402、夹紧块;403、第一限位槽;404、第二限位块;405、移动夹块;406、单向螺纹杆;407、第一转轮;408、连接座;409、第二限位槽;410、第三限位块;411、弹性移动块;412、第一弹簧;413、第二转轮;5、固定轴;501、连接滑块;502、第二弹簧;503、限位杆;504、螺纹连接轴;505、缓冲块。
具体实施方式
30.下面结合说明书附图对本发明的技术方案做进一步的详细说明。
31.如图1
‑
3所示,包括外壳1,外壳1的两侧均固定连接有两个旋翼连接轴101,旋翼连接轴101的上表面固定连接有旋翼102,外壳1的下方设置有两个固定块106,两个固定块106的上表面均固定连接有两个连接块105,连接块105的上表面与外壳1的下表面固定连接,外壳1的内部设置有上移动座107和下移动座108,上移动座107和下移动座108的两侧固定连接有两个滑块,上移动座107和下移动座108通过两侧的滑块竖向滑动连接在外壳1的内壁上。
32.外壳1的两侧设置有两个支撑架109,两个支撑架109分别滑动连接在外壳1的两侧,上移动座107的上表面固定连接有临时信号灯103,下移动座108的下方固定连接有摄像头104,当路面交通信号灯发生故障时,首先通过旋翼102带动外壳1飞行到指定位置,在物联网的控制下通过临时信号灯103进行交通疏导,通过摄像头104起到正常的违规拍照,起到临时疏导交通的作用。
33.如图4和图5所示,包括双向丝杆2,双向丝杆2的两端横穿外壳1的内壁两侧向内延伸,且双向丝杆2的两端转动连接在外壳1的内壁上,双向丝杆2处于下移动座108和上移动座107之间,上移动座107的下表面固定连接有两个上移动块210,下移动座108的上表面固定连接有两个下移动块211,上移动块210和下移动块211的内部分别固定连接有上连接轴208和下连接轴209,上连接轴208和下连接轴209的外表面分别转动连接有上连接杆206和下连接杆207,双向丝杆2的外表面螺纹连接有两个第一螺母座204,第一螺母座204的上下端均固定连接有移动连接轴205,上连接杆206和下连接杆207的另一端均转动连接在移动连接轴205的外表面。
34.双向丝杆2的外表面固定套接有从动伞齿轮201,且从动伞齿轮201处于双向丝杆2的中心位置,从动伞齿轮201的外表面啮合有主伞齿轮202,外壳1的内壁上固定连接有支撑座212,支撑座212的上表面固定连接有电机203,电机203的输出端与主伞齿轮202固定套接;双向丝杆2的外表面开设有旋向相反的螺纹槽,两个第一螺母座204分别螺纹连接在旋向相反的螺纹槽内壁上,双向丝杆2的前后两端分别固定套接有连动伞齿轮307,两个连动伞齿轮307通过双向丝杆2转动连接在外壳1的内部。
35.当外壳1进行飞行时,临时信号灯103和摄像头104处于外壳1的内部,使得其在飞行过程中不会受到外界事物的碰撞导致其损坏,当外壳1飞行到指定位置后,通过电机203启动带动了主伞齿轮202进行转动,当主伞齿轮202进行转动的时候,从而使得从动伞齿轮201随之进行转动,此时双向丝杆2在外壳1的内壁上进行转动,随着双向丝杆2的转动,其外表面的两个第一螺母座204进行相反方向的移动,此时带动了上连接杆206和下连接杆207进行转动,随着上连接杆206和下连接杆207的转动,从而使得上移动座107和下移动座108进行移动,从而使得临时信号灯103和摄像头104处于外界,从而进行交通疏导,当疏导完成后,进行上述相反运动,使得临时信号灯103和摄像头104回到外壳1的内部,从而便于其飞行时,临时信号灯103和摄像头104受到保护,不易损坏。
36.如图6和图7所示,包括转动伞齿轮3,转动伞齿轮3的内壁上固定插接有转动杆301,转动杆301竖直贯穿外壳1的下表面向外壳1的内部延伸,且转动杆301转动连接在外壳1的内壁上,连动伞齿轮307与转动伞齿轮3相啮合,转动杆301的另一端转动连接在固定块
106的上表面,转动杆301的外表面固定套接有主齿轮302,主齿轮302通过转动杆301转动连接在固定块106的内部,主齿轮302的外表面啮合有两个齿条303,两个齿条303相反的一侧均固定连接有第一限位块304,第一限位块304滑动连接在固定块106的内壁上,齿条303的下表面固定连接有连接条305,连接条305贯穿固定块106的下表面向外延伸,且延伸的一端固定连接弧形夹块306,两个弧形夹块306对称分布在固定块106的下方。
37.当外壳1飞行到指定位置时,随着电机203带动双向丝杆2进行转动的同时,使得连动伞齿轮307进行转动,从而带动了转动伞齿轮3进行转动,此时转动杆301在外壳1的内壁上和固定块106的上表面进行转动,从而带动了主齿轮302进行转动,随着主齿轮302的转动,使得其两侧的齿条303进行相向移动,从而带动了第一限位块304和连接条305在固定块106的内壁上进行相向滑动,此时两个弧形夹块306相向移动,对交通信号灯杆进行夹紧,从而使得外壳1固定连接在交通信号灯杆上,此时即可停止旋翼102的转动,使得其能够减小电量的消耗,便于进行长时间的交通疏导。
38.如图8
‑
10所示,包括双向螺纹杆4,双向螺纹杆4转动连接在下移动座108的内壁上,双向螺纹杆4横向贯穿下移动座108的内部,并且穿过下移动座108的正面向外延伸,且延伸的一端固定连接有第二转轮413,双向螺纹杆4的外表面螺纹连接有两个第二螺母座401,双向螺纹杆4的外表面开设有旋向相反的螺纹槽,两个第二螺母座401分别螺纹连接在两个旋向相反的螺纹槽的内壁上,且两个第二螺母座401均滑动连接在下移动座108的下表面,第二螺母座401的下表面固定连接有夹紧块402。
39.两个夹紧块402相对的一侧均固定连接有连接座408,连接座408的上表面与下移动座108的下表面相贴合,夹紧块402的相对的一侧均开设有第一限位槽403,第一限位槽403的内壁上滑动连接有第二限位块404,两个第二限位块404相对的一侧均固定连接有移动夹块405,第二限位块404的内壁上螺纹连接有单向螺纹杆406,单向螺纹杆406转动连接在夹紧块402的内壁上。
40.单向螺纹杆406贯穿夹紧块402的下表面向外延伸,且延伸的一端固定连接有第一转轮407,连接座408的下表面开设有第二限位槽409,第二限位槽409的内壁上滑动连接有两个第三限位块410,第三限位块410的下表面固定连接有弹性移动块411,两个第三限位块410之间固定连接有第一弹簧412,且第一弹簧412处于拉伸状态,摄像头104分别与两个连接座408、两个移动夹块405和四个弹性移动块411相贴合。
41.当需要对摄像头104进行拆卸时,首先通过转动第一转轮407带动了单向螺纹杆单向螺纹杆406进行转动,从而使得第二限位块404在第一限位槽403的内壁上进行滑动,从而带动了移动夹块405进行移动,此时两个移动夹块405与摄像头104相分离,此时一手托住摄像头104,再通过转动第二转轮413带动了双向螺纹杆4进行转动,使得两个夹紧块402进行相反方向的移动,从而使得夹紧块402和弹性移动块411与摄像头104相分离,此时即可取下摄像头104,当更换上摄像头104时,摄像头104的大小型号不同不影响其操作流程。
42.首先将摄像头104放置在两个夹紧块402之间,此时通过反向转动第二转轮413,进行上述相反运动,使得两个夹紧块402相向移动,从而使得此时随着两个夹紧块402的移动,可以将摄像头104的底部与两个连接座408相贴合,此时随着两个夹紧块402的持续移动,使得弹性移动块411与摄像头104相接触,从而使得两个弹性移动块411在连接座408的内壁上进行相反方向的滑动,当夹紧块402移动到合适的位置时,同时在第一弹簧412的作用下,使
得摄像头104处于中心位置,此时通过反向转动第一转轮407,进行上述相反运动,从而使得两个移动夹块405对摄像头104进行夹紧固定,从而完成的对不同型号的摄像头104的快速安装和拆卸。
43.如图11所示,包括固定轴5,固定轴5滑动连接在外壳1的侧面,固定轴5的前后两端均固定连接有连接滑块501,连接滑块501滑动连接在外壳1的内壁上,连接滑块501的内壁上滑动连接有限位杆503,限位杆503固定连接在外壳1的内壁上,连接滑块501套接在限位杆503的外表面,从而使得连接滑块501竖向滑动连接在限位杆503的外表面,限位杆503的外表面套接有第二弹簧502,第二弹簧502的一端固定连接在连接滑块501的上表面,且另一端固定连接在外壳1的内壁上,第二弹簧502始终处于压缩状态,固定轴5的外表面与支撑架109转动连接,另一端固定连接有螺纹连接轴504,螺纹连接轴504的前后均两端螺纹连接有缓冲块505。
44.当外壳1需要飞行到地面时,首先缓冲块505与地面接触,从而使得螺纹连接轴504受到向上的力,从而对支撑架109进行一个力,此时支撑架109对固定轴5进行一个受到,从而使得两个连接滑块501受到力向上移动,随着连接滑块501移动,从而使得第二弹簧502被压缩,此时在第二弹簧502的反作用力下,使得外壳1的下移受到缓冲保护,当其落地平稳后,不受外界因素时,第二弹簧502进行反弹,使得第二弹簧502只受到外壳1的重力作用,维持平稳状态,从而使得外壳1落地时受到保护。
45.工作原理:路面交通信号灯发生故障时,需要进行临时疏导交通时,首先通过旋翼102带动外壳1飞行到指定位置,通过电机203启动带动了主伞齿轮202进行转动,当主伞齿轮202进行转动的时候,从而使得从动伞齿轮201随之进行转动,此时双向丝杆2在外壳1的内壁上进行转动,随着双向丝杆2的转动,其外表面的两个第一螺母座204进行相反方向的移动,此时带动了上连接杆206和下连接杆207进行转动,随着上连接杆206和下连接杆207的转动,从而使得上移动座107和下移动座108进行移动,从而使得临时信号灯103和摄像头104处于外界,从而进行交通疏导。
46.在电机203带动双向丝杆2进行转动的同时,电机203为现有成熟组件,电机203的型号为90yt60wgv22,本发明不在此进行阐述,使得连动伞齿轮307进行转动,从而带动了转动伞齿轮3进行转动,此时转动杆301在外壳1的内壁上和固定块106的上表面进行转动,从而带动了主齿轮302进行转动,随着主齿轮302的转动,使得其两侧的齿条303进行相向移动,从而带动了第一限位块304和连接条305在固定块106的内壁上进行相向滑动,此时两个弧形夹块306相向移动,对交通信号灯杆进行夹紧,从而使得外壳1固定连接在交通信号灯杆上,此时即可停止旋翼102的转动,使得其能够减小电量的消耗,便于进行长时间的交通疏导。
47.当疏导完成后,首先启动旋翼102,再进行上述相反运动,使得临时信号灯103和摄像头104回到外壳1的内部,从而便于其飞行时,临时信号灯103和摄像头104受到保护,同时两个弧形夹块306进行相反方向的移动,使得外壳1与信号灯杆相分离,当外壳1回落到地面时,首先缓冲块505与地面接触,从而使得螺纹连接轴504受到向上的力,从而对支撑架109进行一个力,此时支撑架109对固定轴5进行一个受到,从而使得两个连接滑块501受到力向上移动,随着连接滑块501移动,从而使得第二弹簧502被压缩,此时在第二弹簧502的反作用力下,使得外壳1的下移受到缓冲保护,当其落地平稳后,不受外界因素时,第二弹簧502
进行反弹,使得第二弹簧502只受到外壳1的重力作用,维持平稳状态,从而使得外壳1落地时受到保护。
48.当需要对摄像头104进行拆卸更换时,首先通过转动第一转轮407带动了单向螺纹杆单向螺纹杆406进行转动,从而使得第二限位块404在第一限位槽403的内壁上进行滑动,从而带动了移动夹块405进行移动,此时两个移动夹块405与摄像头104相分离,此时一手托住摄像头104,再通过转动第二转轮413带动了双向螺纹杆4进行转动,使得两个夹紧块402进行相反方向的移动,从而使得夹紧块402和弹性移动块411与摄像头104相分离,此时即可取下摄像头104,当需要更换上摄像头104时,摄像头104的大小型号不同不影响其操作流程。
49.首先将摄像头104放置在两个夹紧块402之间,此时通过反向转动第二转轮413,进行上述相反运动,使得两个夹紧块402相向移动,从而使得此时随着两个夹紧块402的移动,可以将摄像头104的底部与两个连接座408相贴合,此时随着两个夹紧块402的持续移动,使得弹性移动块411与摄像头104相接触,从而使得两个弹性移动块411在连接座408的内壁上进行相反方向的滑动,当夹紧块402移动到合适的位置时,同时在第一弹簧412的作用下,使得摄像头104处于中心位置,此时通过反向转动第一转轮407,进行上述相反运动,从而使得两个移动夹块405对摄像头104进行夹紧固定,从而完成的对不同型号的摄像头104的快速安装和拆卸。
50.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
51.以上所述仅为本发明的较佳实施方式,本发明的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本发明所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。