1.本实用新型属于轨道分析及测量技术领域,具体涉及了一种轨道图像采集小车。
背景技术:
2.轨道是铁路运输业的基础设备,常年裸露在大自然中,受轨道自身损耗、列车荷载、风雨冻融、地质变化等因素的影响,导致轨道几何尺寸不断变化,钢轨、连接件及软枕等不断磨损,因此,铁路管理部门需要及时检测线路状态,以便及时维修,保证运输安全。
3.随着现代科学技术的发展,运用图像处理方式结合数据分析技术进行轨道状态检测也逐渐兴起,而现有技术的对轨道的图像采集存在图像采集不完整,采集效率低下的问题,有待进一步改进。
技术实现要素:
4.本实用新型的目的就在于为解决现有技术的不足而提供一种轨道图像采集小车。
5.本实用新型的目的是以下述技术方案实现的:
6.一种轨道图像采集小车,包括车架以及与所述车架连接的行走装置;
7.所述行走装置包括可沿所述轨道行走的主动轮以及缓冲轮;
8.所述车架上设有可围绕轨道中心进行圆周运动的回转支撑系统,所述回转支撑系统上设有延长臂,所述延长臂上设有图像采集设备,所述图像采集设备上携带有位置、角度采集系统。
9.优选的,所述图像采集设备,在所述延长臂的位置与所述轨道位置重合或位于所述轨道外侧。
10.优选的,所述回转支撑系统包括第一齿轮、第二齿轮以及驱动电机;
11.所述第一齿轮与所述驱动电机的输出轴连接;
12.所述第二齿轮与所述第一齿轮啮合,且其半径大于所述第一齿轮,所述第二齿轮的圆心与所述轨道中心重合;
13.所述延长臂位于所述第二齿轮上;
14.在所述驱动电机驱动所述第一齿轮、所述第一齿轮驱动第二齿轮的作用下,所述延长臂携带所述图像采集设备围绕所述轨道中心作圆周运动。
15.优选的,所述图像采集设备数量为3个,沿轨道中心向外一字形排列;在水平方向上,3个所述图像采集设备的镜头均向所述轨道中心倾斜,且由内之外,3个所述图像采集设备的倾斜角度逐渐递增,在垂直方向上,图像采集设备的镜头朝向角度与所述轨道夹角为30~60
°
,相邻所述图像采集设备采集的图像重叠率不小于60%;所述图像采集设备距离所述轨道的高度为所述轨道之间最大距离的0.8~1.2倍。
16.优选的,所述位置、角度采集系统为组合惯性导航系统。
17.优选的,所述主动轮前后两侧均设有缓冲轮。
18.优选的,所述主动轮内置有微型电机。
19.通过本实用新型提供的图像采集小车,可实现自动行走、自动旋转对轨道进行360
°
拍摄的功能,图像采集效率较高,且采集得到的轨道信息全面完整,提高检测准确度。
附图说明
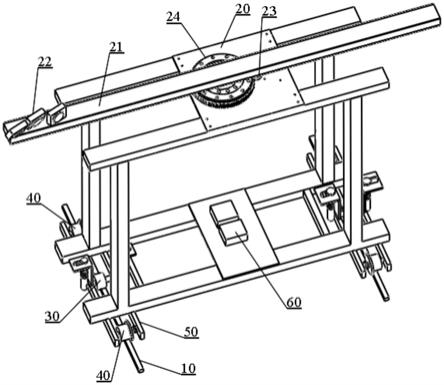
20.图1是本实用新型提供的轨道图像采集小车的结构示意图;
21.图2是图1另一视角的结构示意图。
22.其中,10-轨道,20-回转支撑系统,21-延长臂;22-采集设备,23-第一齿轮,24-第二齿轮,30-主动轮,31-垂直减震组件,40-缓冲轮;41-水平接触部,42-卡接部,43-水平弹性件,50-车轮架;60-驱动器。
具体实施方式
23.本实用新型提供的一种轨道图像采集小车,包括车架、以及与车架连接的行走装置;
24.行走装置包括可沿轨道10行走的主动轮30以及缓冲轮40;
25.车架上设有可围绕轨道中心进行圆周运动的回转支撑系统20,回转支撑系统上设有延长臂21,延长臂21上设有图像采集设备22;在回转支撑系统的作用下,图像采集设备可围绕轨道中心进行圆周运动,运动过程中可对轨道进行拍摄;图像采集设备22,在延长臂的位置与轨道位置重合或位于轨道外侧,可从轨道外围向整个轨道进行拍摄,获取完整的轨道信息;图像采集设备上携带有位置、角度采集系统,可获得图像拍摄的位置、角度信息。
26.通过本实用新型提供的图像采集小车,可实现自动行走、自动旋转对轨道进行360
°
拍摄的功能,图像采集效率较高,且采集得到的轨道信息全面完整,提高检测准确度。
27.优选的,图像采集设备,在延长臂的位置与轨道位置重合或位于轨道外侧,可从轨道外围对整个轨道进行拍摄,利于获得完整的轨道图像信息。
28.优选的,回转支撑系统包括第一齿轮23、第二齿轮24以及驱动电机;
29.第一齿轮与驱动电机的输出轴连接;
30.第二齿轮与第一齿轮啮合,且其半径大于第一齿轮,第二齿轮的圆心与轨道中心重合;
31.延长臂21位于第二齿轮上;
32.在驱动电机驱动第一齿轮、第一齿轮驱动第二齿轮的作用下,延长臂携带图像采集设备围绕轨道中心作圆周运动,实现图像采集设备的自动旋转拍摄。通过设置半径较大的第二齿轮,可减少驱动电机输出功率。
33.优选的,图像采集设备数量为3个,沿轨道中心向外一字形排列;在水平方向上,3个图像采集设备的镜头均向轨道中心倾斜,且由内之外,3个图像采集设备的倾斜角度逐渐递增,在垂直方向上,图像采集设备的镜头朝向角度与轨道夹角为30~60
°
,相邻图像采集设备采集的图像重叠率不小于60%。图像采集时采用多个相机同时进行拍摄,且各相机摆放角度有所不同,获得的图像具有一定的重叠和区别,便于各图像数据进行比对,更好的对轨道边缘进行划分。递增角度优选为15
°
。图像采集设备距离轨道的高度优选为轨道之间最大距离的0.8~1.2倍,在此高度下,有助于获得清晰完整的图像。。
34.优选的,位置、角度采集系统为组合惯性导航系统。
35.优选的,主动轮30前后两侧均设有缓冲轮40。
36.优选的,行走小车还包括车轮架50,车轮架组包括左车轮臂、右车轮臂,主动轮以及缓冲轮通过连接轴70连接于左车轮臂和右车轮臂之间;主动轮内置有微型电机,可提供行走动力,设置缓冲轮可有效缓冲主动轮与轨道之间的硬接触力,提高行走小车行走的稳定性。
37.如本领域技术人员可以理解的,本实用新型主动轮为一对,分别沿一条轨道进行行走,相应的车轮架也为一对,缓冲轮为2对。
38.主动轮与车轮架之间设有垂直减震组件31;进一步减少主动轮与轨道的刚性接触力;
39.缓冲轮包括平面接触部41以及卡接在轨道外侧的卡接部42,卡接部与车轮臂之间的连接轴上设有水平弹性件43,通过卡接部,缓冲轮可卡接在轨道一侧行走,有助于小车姿态稳定;通过设置水平弹性件,当轨道轨距发生变化时,水平弹性件可提供弹性,使缓冲轮可适应轨距变化,继续卡接在轨道一侧进行行走。
40.本实用新型提供的采集小车还包括其他常规组件,如驱动器60、相机安装支架等。
41.以世界通用的标准轨为例,下面给出一优选的图像采集小车设置以及图像采集实施例:
42.标准轨,轨距(内距)为1435mm,本实用新型图像采集小车采用3个全画幅相机,其中最外侧相机中心位置距离运动圆心(轨道中心)1.4m,其它两个相机以15cm间距向圆心逐个排列,3个相机距离轨道(轨道中心位置)高度为1.5m,在水平方向上,由外之内,3个相机向圆心倾斜角度依次为45
°
、30
°
、15
°
,在垂直方向上,3个相机的镜头朝向角度与轨道夹角均为45
°
。
43.在待测轨道上,随着延长臂的旋转,每隔20
°
,3个相机同步拍摄一次,旋转一圈后,完成一个周期的拍摄,主动轮驱动行走小车向前行走2m,继续下一个周期的拍摄,直至完成轨道全部距离的图像采集,获得全部拍摄图像信息,并通过携带的组合惯性导航系统,同步获得每次拍摄的位置、角度信息(imu信息),结合采集得到的图像信息以及拍摄角度、位置信息可对轨道进行进一步分析,得到轨道全状态。
44.尽管已描述了本实用新型的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型范围的所有变更和修改。显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。