1.本实用新型涉及玻璃加工技术领域,具体为一种玻璃切割用定位装置。
背景技术:
2.玻璃是非晶无机非金属材料,一般是用多种无机矿物为主要原料,另外加入少量辅助原料制成的,它的主要成分为二氧化硅和其他氧化物,是一种无规则结构的非晶态固体,玻璃在生产过程中,为了方便生产,生产出来的玻璃的面积都较大,因此在玻璃生产出来后,需要根据客户的需求将玻璃切割成相应的尺寸;
3.但是目前市场上的玻璃切割用定位装置由于缺少便于放料的机构,导致待切割的玻璃板在被固定后,每进行一次切割就需要对玻璃板的夹紧位置进行调节,从而降低了玻璃的切割效率。
技术实现要素:
4.本实用新型提供一种玻璃切割用定位装置,可以有效解决上述背景技术中提出的玻璃切割用定位装置由于缺少便于放料的机构,导致待切割的玻璃板在被固定后,每进行一次切割就需要对玻璃板的夹紧位置进行调节,从而降低了玻璃的切割效率的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种玻璃切割用定位装置,包括支撑平台,所述支撑平台顶部设置有便捷式伸缩夹持机构;
6.所述便捷式伸缩夹持机构包括安装横架、转动电机、驱动丝杠、驱动横杆、夹紧架、液压伸缩杆和橡胶锥;
7.所述支撑平台内侧顶端中部焊接有安装横架,所述安装横架一端中部固定连接有转动电机,所述转动电机的输入端与外部电源的输出端电性连接,所述转动电机的输出轴一端固定连接有驱动丝杠,所述驱动丝杠外侧对应安装横架内侧位置处通过螺纹连接有驱动横杆,所述驱动横杆顶部两端对应支撑平台顶端位置处固定连接有夹紧架,所述夹紧架两端顶部均贯穿固定连接有液压伸缩杆,所述液压伸缩杆底端中部固定连接有橡胶锥。
8.优选的,所述夹紧架底部贯穿支撑平台顶部,且夹紧架与支撑平台之间为滑动连接,所述驱动横杆底部与安装横架之间紧密贴合。
9.优选的,所述支撑平台顶部一侧设置有快速定位导向机构;
10.所述快速定位导向机构包括导向方盒、驱动滑块、滑移横杆、定位吸盘、限位刻度条、抽气盒、抽气桶、螺纹控制杆和橡胶塞;
11.所述支撑平台顶部一侧两端对称固定连接有导向方盒,所述导向方盒内侧滑动连接有驱动滑块,所述驱动滑块一端固定连接有滑移横杆,所述滑移横杆顶端中部嵌入安装有定位吸盘,所述滑移横杆一侧顶部固定连接有限位刻度条,所述定位吸盘一侧对应滑移横杆另一侧位置处通过管道连接有抽气盒,所述抽气盒顶部两端中部均固定连接有抽气桶,所述抽气桶内侧顶部通过螺纹连接有螺纹控制杆,所述螺纹控制杆底端对应抽气桶内侧位置处固定连接有橡胶塞。
12.优选的,所述定位吸盘、抽气盒和抽气桶内部空间相连通,所述橡胶塞外侧与抽气桶内壁之间紧密贴合。
13.优选的,所述支撑平台内侧底部设置有切屑收集机构;
14.所述切屑收集机构包括支撑底板、限位拐板、收集箱、连接侧板和导料弯斗;
15.所述支撑平台内侧底部焊接有支撑底板,所述支撑底板顶端两侧均固定安装有限位拐板,所述支撑底板顶部对应限位拐板一侧位置处放置有收集箱,所述支撑平台内侧两端位置处对称固定连接有连接侧板,所述连接侧板底端焊接有导料弯斗。
16.优选的,所述收集箱侧面与限位拐板之间紧密贴合,所述导料弯斗的出口位于收集箱的顶部。
17.与现有技术相比,本实用新型的有益效果:本实用新型结构科学合理,使用安全方便:
18.1.设置了便捷式伸缩夹持机构,通过支撑横条对玻璃板进行辅助支撑,通过液压伸缩杆带动橡胶锥下压,通过橡胶锥对玻璃板进行夹持,从而实现了对玻璃板的固定,通过转动电机带动驱动丝杠进行转动,通过驱动丝杠的转动带动驱动横杆沿安装横架顶部进行滑动,从而在驱动横杆的运动过程中带动夹紧架进行运动,通过夹紧架的运动带动玻璃板沿支撑横条顶部进行滑动,从而将玻璃板切割完一段后,进行快速的放料,从而有效的提高了玻璃切割的便捷性,优化了定位装置的使用过程,提高了定位装置的使用性能。
19.2.设置了快速定位导向机构,通过手动拨动滑移横杆带动驱动滑块沿导向方盒内壁进行滑动,通过导向方盒和驱动滑块对滑移横杆之间的引导,有效的防止了滑移横杆在滑移过程中出现偏移,在滑移横杆滑动的过程中会带动限位刻度条一起滑动,待限位刻度条滑动到合适的位置后,通过转动螺纹控制杆带动橡胶塞沿抽气桶内壁上升,在橡胶塞上升的过程中会在抽气桶和抽气盒内部形成负压,从而在负压的作用下使定位吸盘与玻璃板之间紧密贴合,完成对滑移横杆和限位刻度条的固定,通过限位刻度条在玻璃切割过程中对玻璃切割刃进行引导,从而有效的提高了切割的精度。
20.3.设置了切屑收集机构,通过连接侧板将导料弯斗固定到支撑平台的边部,通过导料弯斗对玻璃板切割过程中产生的切削进行收集,并将切屑导入收集箱内部,通过限位拐板对收集箱的位置进行限位,从而确保收集箱放置在支撑底板上时可以正好位于导料弯斗的出口位置处,通过对玻璃板切割过程中产生的切屑进行主动的收集,有效的防止了切屑四散污染了定位装置周围的环境,优化了定位装置的使用过程。
附图说明
21.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
22.在附图中:
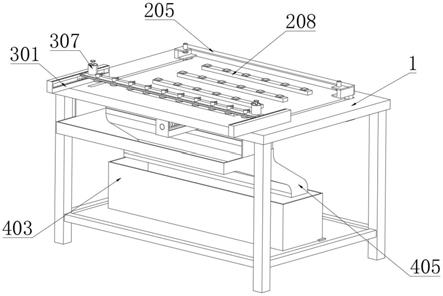
23.图1是本实用新型的结构示意图;
24.图2是本实用新型便捷式伸缩夹持机构的结构示意图;
25.图3是本实用新型快速定位导向机构的结构示意图;
26.图4是本实用新型切屑收集机构的结构示意图;
27.图中标号:1、支撑平台;
28.2、便捷式伸缩夹持机构;201、安装横架;202、转动电机;203、驱动丝杠;204、驱动横杆;205、夹紧架;206、液压伸缩杆;207、橡胶锥;208、支撑横条;
29.3、快速定位导向机构;301、导向方盒;302、驱动滑块;303、滑移横杆;304、定位吸盘;305、限位刻度条;306、抽气盒;307、抽气桶;308、螺纹控制杆;309、橡胶塞;
30.4、切屑收集机构;401、支撑底板;402、限位拐板;403、收集箱;404、连接侧板;405、导料弯斗。
具体实施方式
31.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
32.实施例:如图1-4所示,本实用新型提供一种技术方案,一种玻璃切割用定位装置,包括支撑平台1,支撑平台1顶部设置有便捷式伸缩夹持机构2;
33.便捷式伸缩夹持机构2包括安装横架201、转动电机202、驱动丝杠203、驱动横杆204、夹紧架205、液压伸缩杆206和橡胶锥207;
34.支撑平台1内侧顶端中部焊接有安装横架201,安装横架201一端中部固定连接有转动电机202,转动电机202的输入端与外部电源的输出端电性连接,转动电机202的输出轴一端固定连接有驱动丝杠203,驱动丝杠203外侧对应安装横架201内侧位置处通过螺纹连接有驱动横杆204,驱动横杆204顶部两端对应支撑平台1顶端位置处固定连接有夹紧架205,夹紧架205两端顶部均贯穿固定连接有液压伸缩杆206,液压伸缩杆206底端中部固定连接有橡胶锥207,夹紧架205底部贯穿支撑平台1顶部,且夹紧架205与支撑平台1之间为滑动连接,驱动横杆204底部与安装横架201之间紧密贴合,通过支撑横条208对玻璃板进行辅助支撑,通过液压伸缩杆206带动橡胶锥207下压,通过橡胶锥207对玻璃板进行夹持,从而实现了对玻璃板的固定,通过转动电机202带动驱动丝杠203进行转动,通过驱动丝杠203的转动带动驱动横杆204沿安装横架201顶部进行滑动,从而在驱动横杆204的运动过程中带动夹紧架205进行运动,通过夹紧架205的运动带动玻璃板沿支撑横条208顶部进行滑动,从而将玻璃板切割完一段后,进行快速的放料,从而有效的提高了玻璃切割的便捷性,优化了定位装置的使用过程,提高了定位装置的使用性能;
35.支撑平台1顶部一侧设置有快速定位导向机构3;
36.快速定位导向机构3包括导向方盒301、驱动滑块302、滑移横杆303、定位吸盘304、限位刻度条305、抽气盒306、抽气桶307、螺纹控制杆308和橡胶塞309;
37.支撑平台1顶部一侧两端对称固定连接有导向方盒301,导向方盒301内侧滑动连接有驱动滑块302,驱动滑块302一端固定连接有滑移横杆303,滑移横杆303顶端中部嵌入安装有定位吸盘304,滑移横杆303一侧顶部固定连接有限位刻度条305,定位吸盘304一侧对应滑移横杆303另一侧位置处通过管道连接有抽气盒306,抽气盒306顶部两端中部均固定连接有抽气桶307,抽气桶307内侧顶部通过螺纹连接有螺纹控制杆308,螺纹控制杆308底端对应抽气桶307内侧位置处固定连接有橡胶塞309,定位吸盘304、抽气盒306和抽气桶307内部空间相连通,橡胶塞309外侧与抽气桶307内壁之间紧密贴合,通过手动拨动滑移横杆303带动驱动滑块302沿导向方盒301内壁进行滑动,通过导向方盒301和驱动滑块302对滑移横杆303之间的引导,有效的防止了滑移横杆303在滑移过程中出现偏移,在滑移横杆
303滑动的过程中会带动限位刻度条305一起滑动,待限位刻度条305滑动到合适的位置后,通过转动螺纹控制杆308带动橡胶塞309沿抽气桶307内壁上升,在橡胶塞309上升的过程中会在抽气桶307和抽气盒306内部形成负压,从而在负压的作用下使定位吸盘304与玻璃板之间紧密贴合,完成对滑移横杆303和限位刻度条305的固定,通过限位刻度条305在玻璃切割过程中对玻璃切割刃进行引导,从而有效的提高了切割的精度;
38.支撑平台1内侧底部设置有切屑收集机构4;
39.切屑收集机构4包括支撑底板401、限位拐板402、收集箱403、连接侧板404和导料弯斗405;
40.支撑平台1内侧底部焊接有支撑底板401,支撑底板401顶端两侧均固定安装有限位拐板402,支撑底板401顶部对应限位拐板402一侧位置处放置有收集箱403,支撑平台1内侧两端位置处对称固定连接有连接侧板404,连接侧板404底端焊接有导料弯斗405,收集箱403侧面与限位拐板402之间紧密贴合,导料弯斗405的出口位于收集箱403的顶部,通过连接侧板404将导料弯斗405固定到支撑平台1的边部,通过导料弯斗405对玻璃板切割过程中产生的切削进行收集,并将切屑导入收集箱403内部,通过限位拐板402对收集箱403的位置进行限位,从而确保收集箱403放置在支撑底板401上时可以正好位于导料弯斗405的出口位置处,通过对玻璃板切割过程中产生的切屑进行主动的收集,有效的防止了切屑四散污染了定位装置周围的环境,优化了定位装置的使用过程。
41.本实用新型的工作原理及使用流程:本实用新型在实际应用过程中,在需要对玻璃板进行定位切割时,需要先对玻璃板进行夹持,在将玻璃板放置到支撑平台1顶部后,通过支撑横条208对玻璃板进行辅助支撑,通过液压伸缩杆206带动橡胶锥207下压,通过橡胶锥207对玻璃板进行夹持,从而实现了对玻璃板的固定,通过转动电机202带动驱动丝杠203进行转动,通过驱动丝杠203的转动带动驱动横杆204沿安装横架201顶部进行滑动,从而在驱动横杆204的运动过程中带动夹紧架205进行运动,通过夹紧架205的运动带动玻璃板沿支撑横条208顶部进行滑动,从而将玻璃板切割完一段后,进行快速的放料,从而有效的提高了玻璃切割的便捷性,优化了定位装置的使用过程,提高了定位装置的使用性能;
42.在对玻璃板进行切割时需要对玻璃板的切割位置处进行定位导向,从而确保切口保持平整,在对切割位置进行调整时,通过手动拨动滑移横杆303带动驱动滑块302沿导向方盒301内壁进行滑动,通过导向方盒301和驱动滑块302对滑移横杆303之间的引导,有效的防止了滑移横杆303在滑移过程中出现偏移,在滑移横杆303滑动的过程中会带动限位刻度条305一起滑动,待限位刻度条305滑动到合适的位置后,通过转动螺纹控制杆308带动橡胶塞309沿抽气桶307内壁上升,在橡胶塞309上升的过程中会在抽气桶307和抽气盒306内部形成负压,从而在负压的作用下使定位吸盘304与玻璃板之间紧密贴合,完成对滑移横杆303和限位刻度条305的固定,通过限位刻度条305在玻璃切割过程中对玻璃切割刃进行引导,从而有效的提高了切割的精度;
43.在玻璃的切割该过程中会自然产生切屑,这些切屑如果直接散落到定位装置的周围,则会对定位装置周围造成污染,通过连接侧板404将导料弯斗405固定到支撑平台1的边部,通过导料弯斗405对玻璃板切割过程中产生的切削进行收集,并将切屑导入收集箱403内部,通过限位拐板402对收集箱403的位置进行限位,从而确保收集箱403放置在支撑底板401上时可以正好位于导料弯斗405的出口位置处,通过对玻璃板切割过程中产生的切屑进
行主动的收集,有效的防止了切屑四散污染了定位装置周围的环境,优化了定位装置的使用过程。
44.最后应说明的是:以上所述仅为本实用新型的优选实例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。