一种高负载的agv小车
技术领域
1.本实用新型属于重工业产品输送设备技术领域,具体涉及一种高负载的agv小车。
背景技术:
2.agv(automated guided vehicle)即“自动导引车”,车上配有自动导引装置,能够沿着预定的轨迹进行物料搬运,并保持一定的运动精度,是一种具有储电能力、工作效率高、安全可靠、灵活的移动式工业机器人。在全球工业转型升级的浪潮中,agv正逐步应用于越来越多的领域。对于常规应用,如普通汽车装配、物流仓储、泊车、烟草、医药、食品等行业,agv的额定负载一般在2t以内,而对于几十吨到几百吨的重型负载的加工制造、搬运等自动化作业,普通agv难以满足其需求,需要由重载agv来实现。但目前在焊丝制造等重工行业尚缺乏高效、自动化程度高的物流转运设备。
3.因此,需要设计一种新的高负载的agv小车。
技术实现要素:
4.本实用新型的目的在于提供一种高负载的agv小车,以解决背景技术中提出的目前在焊丝制造等重工行业尚缺乏高效、自动化程度高的物流转运设备的问题。
5.为实现上述目的,本实用新型提供了一种高负载的agv小车,包括车架、万向脚轮组件、承载板组件、rfid读卡器、框架组件、控制箱体组件、防撞组件、避障组件、磁导航传感器、舵轮组件和电池箱体组件;
6.所述万向脚轮组件和舵轮组件均设置在车架的下方,万向脚轮组件用于辅助移动;所述承载板组件设置在车架的上方中部,用于承载货物;所述框架组件设置在车架上方的侧面,用于承载货物并方便部件的装配;所述rfid读卡器设置在车架的中部;所述磁导航传感器和避障组件设置在车架前后方向的端部;所述控制箱体组件和电池箱体组件直接或间接设置在车架上,电池箱体组件用于供电,控制箱体组件通过接收来自磁导航传感器、防撞组件、rfid读卡器和避障组件的信息来控制舵轮组件进而控制agv小车的移动方向;所述防撞组件设置在车架的四周。
7.在一种具体的实施方式中,所述高负载的agv小车还包括用于固定货物的吊环,吊环穿过承载板组件可拆卸设置在车架上。
8.在一种具体的实施方式中,所述承载板组件和框架组件的上表面均为平板且处于同一水平高度。
9.在一种具体的实施方式中,所述承载板组件和框架组件均为可拆卸设置在车架上。
10.在一种具体的实施方式中,所述高负载的agv小车包括两个框架组件,且两个框架组件分别设置在agv小车的左右两侧。
11.在一种具体的实施方式中,所述避障组件为避障传感器。
12.在一种具体的实施方式中,所述防撞组件为安全触边。
13.在一种具体的实施方式中,所述承载板组件包括支撑架和钢板,钢板固定设置在支撑架上方。
14.在一种具体的实施方式中,所述支撑架为焊接形成的矩形空心型钢支撑架,所述钢板的厚度大于等于8mm。
15.在一种具体的实施方式中,所述控制箱体组件和电池箱体组件分别设置在agv小车的左右两侧。
16.相比于现有技术,本实用新型具有以下有益效果:
17.本实用新型能够适应大多数高负载需求,具有较高的灵活性、安全性和可靠性。
18.本实用新型为一种低速重载、全自动智能输送小车,用于重载特殊物流运输,弥补了现有焊丝等重工行业缺乏的高效、自动化程度高的物流转运设备。在现代化车间智能化生产线中,通过与其他设备配合,实现货物、工件智能化输送,极大的提高了生产效率、降低了生产成本;此外,本实用新型的车体结构设计有利于根据不同的客户需求快速换型即更换附带功能,可以有效的减低开发成本。
19.本实用新型可实现与其他物流系统的对接,自动化程度高。
20.本实用新型采用无线通信调度系统,搬运过程中可灵活变更行走路径,适应复杂的路线要求。
21.本实用新型具有完善的安全保护功能。
22.本实用新型降低了工人的劳动强度,促进了工业转型升级,提高了企业生产效率和经济效益。
23.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
24.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
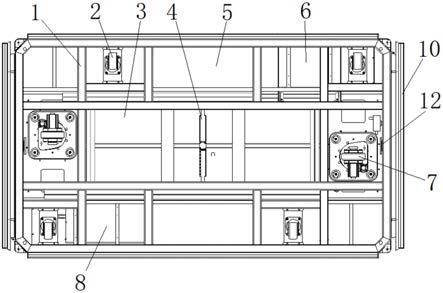
25.图1是本实用新型一种实施例的仰视图;
26.图2是本实用新型一种实施例的主视图;
27.图3是本实用新型一种实施例的示意图;
28.图4是本实用新型一种实施例的承载板组件的仰视方向示意图;
29.图5是本实用新型一种实施例的防撞组件的示意图;
30.图6是本实用新型一种实施例的车架的示意图;
31.图7是本实用新型一种实施例的框架组件的示意图;
32.其中,1、车架;2、万向脚轮组件;3、承载板组件;4、rfid读卡器;5、框架组件;6、控制箱体组件;7、舵轮组件;8、电池箱体组件;9、避障组件;10、防撞组件;11、吊环;12、磁导航传感器。
具体实施方式
33.以下结合附图对本实用新型的实施例进行详细说明,但是本实用新型可以根据权
利要求限定和覆盖的多种不同方式实施。
34.实施例1
35.本实用新型提供的一种高负载的agv小车,包括车架1、万向脚轮组件2、承载板组件3、rfid读卡器4、框架组件5、控制箱体组件6、防撞组件10、避障组件9、磁导航传感器12、舵轮组件7和电池箱体组件8;
36.所述万向脚轮组件2和舵轮组件7均设置在车架1的下方,万向脚轮组件2用于辅助移动;所述承载板组件3设置在车架1的上方中部,用于承载货物;所述框架组件5设置在车架1上方的侧面,用于承载货物并方便部件的装配;所述rfid读卡器4设置在车架1的中部;所述磁导航传感器12和避障组件9设置在车架1前后方向的端部;所述控制箱体组件6和电池箱体组件8直接或间接设置在车架1上,电池箱体组件8用于供电,控制箱体组件6通过接收来自磁导航传感器12、防撞组件10、rfid读卡器4和避障组件9的信息来控制舵轮组件7进而控制agv小车的移动方向;所述防撞组件10设置在车架1的四周。
37.所述车架用于承重和搭载车架以外的部件。所述舵轮组件用于控制agv小车移动的方向。所述框架组件的设计是为了方便安装新的部件以使得agv小车增加新的功能。
38.优选所述车架采用矩形空心型钢焊接而成,矩形空心型钢的长宽厚为150*100*5毫米。优选所述万向脚轮组件2包括四个呈平行四边形分布在车架边框下方的万向脚轮,万向脚轮的轮直径为200毫米,万向脚轮的轮宽度为100毫米。优选所述舵轮组件7包括两个分别位于车架边框的前端和后端的舵轮,且两舵轮之间的连线与agv小车前进方向的轴线呈一定角度,舵轮的轮直径为280毫米,舵轮的轮宽度为80毫米。电池箱体组件8通过导线分别与rfid读卡器4、控制箱体组件6、防撞组件10、避障组件9、磁导航传感器12、舵轮组件7进行连接。控制箱体组件6还通过导线分别与rfid读卡器4、防撞组件10、避障组件9、磁导航传感器12、舵轮组件7进行连接。
39.所述高负载的agv小车的行走区域内的地面设置有作为引导的磁条或磁道钉,磁导航传感器12根据控制箱体组件6发出的指令去感应作为引导的磁条或磁道钉,然后反馈给控制箱体组件6,进而控制箱体组件6控制舵轮组件7完成agv小车的移动。在所述高负载的agv小车的行走区域内,在需要停留位置的地面上设置地标卡,当rfid读卡器4感应到地标卡即发出信息给控制箱体组件6,进而控制箱体组件6按预设程序控制agv小车进行停留。
40.在一种具体的实施方式中,所述高负载的agv小车还包括用于固定货物的吊环11,吊环11穿过承载板组件3可拆卸设置在车架1上。
41.在一种具体的实施方式中,所述承载板组件3和框架组件5的上表面均为平板且处于同一水平高度。
42.在一种具体的实施方式中,所述承载板组件3和框架组件5均为可拆卸设置在车架1上。
43.在一种具体的实施方式中,所述高负载的agv小车包括两个框架组件5,且两个框架组件5分别设置在agv小车的左右两侧。
44.在一种具体的实施方式中,所述避障组件9为避障传感器。优选在agv小车的前后两端均设置激光避障传感器,使得前进后退时均可提前对障碍物进行感知。当避障组件9感应到前方一定距离有障碍时,反馈信息给控制箱体组件6,控制箱体组件6按反馈距离的远近控制agv小车减速或者停止。
45.在一种具体的实施方式中,所述防撞组件10为安全触边。当安全触边被触发时,反馈信息给控制箱体组件6,控制箱体组件6控制agv小车紧急停止。
46.在一种具体的实施方式中,所述承载板组件3包括支撑架和钢板,钢板固定设置在支撑架上方。
47.在一种具体的实施方式中,所述支撑架为焊接形成的矩形空心型钢支撑架,所述钢板的厚度大于等于8mm。优选支撑架使用的矩形空心型钢的长宽厚为100*50*5毫米。
48.在一种具体的实施方式中,所述控制箱体组件6和电池箱体组件8分别设置在agv小车的左右两侧。
49.以上内容是结合具体的优选实施方式对本实用新型作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演和替换,都应当视为属于本实用新型的保护范围。