1.本技术涉及电动车技术领域,具体而言,涉及一种双前轮开合结构及电动车。
背景技术:
2.目前,电动车包括电动摩托车和电动自行车等形式,电动车相较于人力踩动进行驱动的自行车而言,具有行驶速度快,操作省力的特点,更受使用者的青睐。因此,电动车在生活中的使用较为常见,几乎每个家庭都会选择购买一辆电动车,因其骑行方便,不费力,且基本不会发生堵车的情况,所以人们在出行距离不远的情况下都会选择骑行电动车出行。
3.随着新一代消费群体逐渐成为电动车消费的主力军,个性化、外观时尚、性能增强、科技感强的电动车成为市场消费热点。目前自动泊车技术变得越来越普及,两轮电动车自动泊车技术也成为可能。但是在实现两轮的电动车自动泊车时由于车速较低,需要解决车体的自平衡问题。市面上已有车体加平衡陀螺仪来实现车体自平衡,但是这套包含陀螺仪的自平衡系统成本较高,限制了电动车行业的进一步发展。
技术实现要素:
4.本技术的目的在于提供一种双前轮开合结构及电动车,能够在需要自动泊车或驻车时将双前轮分开,防止电动车倾倒。
5.本技术的实施例是这样实现的:
6.本技术实施例的一方面,提供一种双前轮开合结构,包括车架、设置在所述车架上的方向把组件,以及与所述方向把组件连接的减振组件,所述减振组件包括相对设置的第一减振支撑组件和第二减振支撑组件,所述第一减振支撑组件上设置有第一车轮,所述第二减振支撑组件上设置有第二车轮;所述车架上还设置有与所述减振组件连接的驱动组件,以使所述第一减振支撑组件和第二减振支撑组件之间具有平行设置的第一状态,以及呈预设夹角设置的第二状态。
7.可选地,所述方向把组件包括车把手,以及与所述车把手连接的转向柱,所述车架包括头管,所述转向柱穿设于所述头管内且与所述头管转动连接。
8.可选地,所述转向柱远离所述车把手的一端设置有连接座,所述第一减振支撑组件和所述第二减振支撑组件分别与所述连接座转动连接。
9.可选地,所述驱动组件包括设置在所述车架上的直线驱动件、与所述直线驱动件连接的蜗杆,以及分别与所述蜗杆啮合的第一蜗轮和第二蜗轮,其中,所述第一蜗轮与所述第一减振支撑组件连接,所述第二蜗轮与所述第二减振支撑组件连接。
10.可选地,所述直线驱动件与所述蜗杆之间通过万向接头连接,且所述车架上设置有轴套,所述蜗杆套设于所述轴套内。
11.可选地,所述驱动组件包括设置在所述车架上的直线驱动件、与所述直线驱动件连接的导向杆,以及分别与所述导向杆铰接的第一连杆和第二连杆,且所述第一连杆与所
述第一减振支撑组件连接,所述第二连杆与所述第二减振支撑组件连接。
12.可选地,所述预设夹角小于或等于30
°
。
13.可选地,所述第一减振支撑组件和所述第二减振支撑组件分别包括相互套设的第一伸缩杆和第二伸缩杆,所述第一伸缩杆能够伸出或缩进所述第二伸缩杆预设距离。
14.可选地,所述第一减振支撑组件和所述第二减振支撑组件分别包括铰接座,所述铰接座与所述连接座之间转动连接。
15.本技术实施例的另一方面,提供一种电动车,包括控制器,以及如上所述任意一项所述的双前轮开合结构,所述双前轮开合结构的驱动组件与所述控制器电连接。
16.本技术实施例的有益效果包括:
17.本技术实施例提供的双前轮开合结构,通过车架,以及设置在车架上的方向把组件,方向把组件与减振组件连接,而减振组件的第一减振支撑组件上设置有第一车轮,第二减振支撑组件上设置有第二车轮,在转动方向把组件时,可通过减振组件带动第一车轮和第二车轮同步偏转,以便于控制电动车的骑行方向。另外,通过在车架上设置的与减振组件连接的驱动组件,能够控制第一减振支撑组件和第二减振支撑组件之间的开合角度。在骑行的状态下,第一减振支撑组件和第二减振支撑组件之间平行设置,以使第一车轮和第二车轮平行并排设置,以保证电动车在此状态下与常规的骑行模式无异。而在需要自动泊车或者驻车时,第一减振支撑组件和第二减振支撑组件之间呈预设夹角设置,以使第一车轮和第二车轮之间也呈预设夹角,且第一车轮与第二车轮与地面接触的位置相互远离,从而时第一车轮、第二车轮和电动车的后轮之间形成稳定的支撑,防止电动车倾倒。
附图说明
18.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
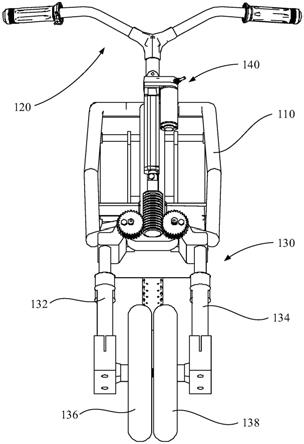
19.图1为本技术实施例提供的双前轮开合结构的结构示意图之一;
20.图2为本技术实施例提供的双前轮开合结构的结构示意图之二;
21.图3为本技术实施例提供的双前轮开合结构的结构示意图之三;
22.图4为本技术实施例提供的减振组件与连接座配合的结构示意图。
23.图标:110-车架;112-头管;120-方向把组件;122-车把手;124-转向柱;126-连接座;130-减振组件;132-第一减振支撑组件;134-第二减振支撑组件;1342-第一伸缩杆;1344-第二伸缩杆;1346-铰接座;136-第一车轮;138-第二车轮;140-驱动组件;142-直线驱动件;144-蜗杆;145-第一蜗轮;146-第二蜗轮;147-万向接头。
具体实施方式
24.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
25.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
26.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
27.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
28.随着目前自动泊车技术变得越来越普及,两轮电动车自动泊车技术也成为可能。但是在实现两轮的电动车自动泊车时由于车速较低,需要解决车体的自平衡问题。市面上已有车体加平衡陀螺仪来实现车体自平衡,但是这套包含陀螺仪的自平衡系统成本较高,限制了电动车行业的进一步发展。本技术实施例提供以下方案,能够在需要自动泊车或驻车时将双前轮分开,防止电动车倾倒。
29.请参照图1和图2,本实施例提供一种双前轮开合结构,包括车架110、设置在车架110上的方向把组件120,以及与方向把组件120连接的减振组件130,减振组件130包括相对设置的第一减振支撑组件132和第二减振支撑组件134,第一减振支撑组件132上设置有第一车轮136,第二减振支撑组件134上设置有第二车轮138;车架110上还设置有与减振组件130连接的驱动组件140,以使第一减振支撑组件132和第二减振支撑组件134之间具有平行设置的第一状态,以及呈预设夹角设置的第二状态。
30.具体的,通过车架110以及设置在车架110上的方向把组件120,可通过方向把组件120控制电动车的骑行方向。通过与方向把组件120连接的减振组件130,且减振组件130的第一减振支撑组件132上设置有第一车轮136,第二减振支撑组件134上设置有第二车轮138,在骑行状态下,第一减振支撑组件132和第二减振支撑组件134之间平行设置,以使第一车轮136和第二车轮138平行并排设置。
31.通过在车架110上设置与减振组件130连接的驱动组件140,可根据实际需要控制第一减振支撑组件132和第二减振支撑组件134之间的连接形式。示例的,在需要自动泊车或驻车时,通过驱动组件140控制第一减振支撑组件132和第二减振支撑组件134,以使第一减振支撑组件132和第二减振支撑组件134成预设夹角设置。这样一来,使得第一车轮136、第二车轮138和电动车的后轮与地面之间形成三角形稳定的支撑结构,避免了电动车的倾倒。
32.本技术实施例提供的双前轮开合结构,通过车架110,以及设置在车架110上的方向把组件120,方向把组件120与减振组件130连接,而减振组件130的第一减振支撑组件132上设置有第一车轮136,第二减振支撑组件134上设置有第二车轮138,在转动方向把组件120时,可通过减振组件130带动第一车轮136和第二车轮138同步偏转,以便于控制电动车的骑行方向。另外,通过在车架110上设置的与减振组件130连接的驱动组件140,能够控制第一减振支撑组件132和第二减振支撑组件134之间的开合角度。在骑行的状态下,第一减
振支撑组件132和第二减振支撑组件134之间平行设置,以使第一车轮136和第二车轮138平行并排设置,以保证电动车在此状态下与常规的骑行模式无异。而在需要自动泊车或者驻车时,第一减振支撑组件132和第二减振支撑组件134之间呈预设夹角设置,以使第一车轮136和第二车轮138之间也呈预设夹角,且第一车轮136与第二车轮138与地面接触的位置相互远离,从而时第一车轮136、第二车轮138和电动车的后轮之间形成稳定的支撑,防止电动车倾倒。
33.如图3所示,方向把组件120包括车把手122,以及与车把手122连接的转向柱124,车架110包括头管112,转向柱124穿设于头管112内且与头管112转动连接。
34.具体的,车把手122方便骑行人员进行握持,在转动车把手122时带动转向柱124同步转动,以对骑行的方向进行控制。其中,转向柱124穿设于头管112内,且与头管112转动连接,头管112与转向柱124之间设置有轴承,有利于保证转向柱124与头管112之间稳定的转动。
35.如图3和图4所示,转向柱124远离车把手122的一端设置有连接座126,第一减振支撑组件132和第二减振支撑组件134分别与连接座126转动连接。
36.具体的,通过在转向柱124远离车把手122的一端设置连接座126,在通过车把手122带动转向柱124转动时,带动连接座126同步转动。第一减振支撑组件132和第二减振支撑组件134分别与连接座126转动连接,则连接座126带动第一减振支撑组件132和第二减振支撑组件134同步转动,以使第一车轮136和第二车轮138对应转向。
37.如图2和图3所示,驱动组件140包括设置在车架110上的直线驱动件142、与直线驱动件142连接的蜗杆144,以及分别与蜗杆144啮合的第一蜗轮145和第二蜗轮146,其中,第一蜗轮145与第一减振支撑组件132连接,第二蜗轮146与第二减振支撑组件134连接。
38.具体的,直线驱动件142可采用直线电机,或者电动推杆,以带动蜗杆144直线运动,由于蜗杆144分别与第一蜗轮145和第二蜗轮146啮合,在蜗杆144直线运动时,带动第一蜗轮145和第二涡轮转动,同时,蜗杆144相对直线驱动件142转动,以保证相互间连接的可靠运行。第一蜗轮145与第一减振支撑组件132连接,第二蜗轮146与第二减振支撑组件134连接,因此,在第一蜗轮145和第二蜗轮146转动时,第一蜗轮145带动第一减振支撑组件132同步转动,第二蜗轮146带动第二减振支撑组件134同步转动,以使第一减振支撑组件132和第二减振支撑组件134分别相对连接座126摆动,以实现两者之间所成角度的调节。
39.在本技术的可选实施例中,直线驱动件142与蜗杆144之间通过万向接头147连接,且车架110上设置有轴套,蜗杆144套设于轴套内。
40.具体的,直线驱动件142带动蜗杆144做直线运动时,由于蜗杆144分别与第一蜗轮145和第二蜗轮146啮合,在蜗杆144做直线运动时,在啮合力的作用下还进行自转运动,通过在直线驱动件142和蜗杆144之间设置万向接头147,能够使直线驱动件142与蜗杆144之间具有相对转动,有利于保证连接的稳定性。另外,通过在车架110上设置轴套,在蜗杆144套设于轴套内时,能够保证蜗杆144沿特定方向做直线运动,避免蜗杆144受力偏斜,有利于保证连接的稳定性。
41.可以理解的,也可以根据实际需要设置蜗杆144中螺牙的偏斜角度,并且将直线驱动件142更换为旋转驱动件,只需要通过旋转驱动件带动蜗杆144转动,即可通过蜗杆144分别带动第一蜗轮145和第二蜗轮146做与蜗杆144转动平面相垂直的转动,同样可以起到带
动第一减振支撑组件132和第二减振支撑组件134分别相对连接座126摆动的目的。
42.在本技术的另一可选实施例中,驱动组件140包括设置在车架110上的直线驱动件142、与直线驱动件142连接的导向杆,以及分别与导向杆铰接的第一连杆和第二连杆,且第一连杆与第一减振支撑组件132连接,第二连杆与第二减振支撑组件134连接。
43.具体的,在直线驱动件142动作时,带动导向杆做直线运动,由于导向杆分别与第一连杆和第二连杆之间铰接,在导向杆位于远离连接座126的位置时,导向杆带动第一连杆和第二连杆与导向杆之间的铰接端运动,以使第一连杆和第二连杆之间呈锐角,在导向杆向靠近连接座126的位置运动时,由于第一连杆与第一减振支撑组件132连接,第二连杆与第二减振支撑组件134连接,受限于第一减振支撑组件132和第二减振支撑组件134的位置,使得第一连杆和第二连杆之间的角度逐渐变大,并且分别带动第一减振支撑组件132和第二减振支撑组件134之间形成一定的张角。
44.需要说明的是,在通过导向杆带动第一连杆和第二连杆动作时,为了方便导向杆分别与第一连杆和第二连杆之间连接,可以导向杆上设置耳板,以便于导向杆通过耳板分别与第一连杆和第二连杆连接。另外,为了避免导向杆带动第一连杆和第二连杆运动时卡死,可在耳板处设置槽孔,或者分别在第一连杆和第二连杆处设置槽孔。
45.在本技术的可选实施例中,预设夹角小于或等于30
°
。具体的,当第一减振支撑组件132和第二减振支撑组件134张开一定的夹角之后,会使电动车前部位置低于后轮所在位置,为了保证电动车的稳定性,该预设夹角不能无限度的变大。另外,受限与第一车轮136和第二车轮138的轮胎影响,该预设夹角也不能无限度的变大。示例的,该预设夹角可设置为0
°
,该状态即为骑行过程中,第一车轮136和第二车轮138平行并排设置分状态。该预设夹角也可以设置为20
°
或30
°
等,只要能够使电动车稳定的支撑,避免倾倒即可。
46.如图4所示,第一减振支撑组件132和第二减振支撑组件134分别包括相互套设的第一伸缩杆1342和第二伸缩杆1344,第一伸缩杆1342能够伸出或缩进第二伸缩杆1344预设距离。
47.具体的,第一伸缩杆1342或第二伸缩杆1344上可套设有压缩弹簧,且压缩弹簧的两端分别与第一伸缩杆1342和第二伸缩杆1344抵持,以通过压缩弹簧对方向把组件120起到减振的作用。另外,第一减振支撑组件132和第二减振支撑组件134中的第一伸缩杆1342和第二伸缩杆1344可成对设置,有利于提升连接的可靠性。
48.如图4所示,第一减振支撑组件132和第二减振支撑组件134分别包括铰接座1346,铰接座1346与连接座126之间转动连接。
49.具体的,铰接座1346与安装座之间可通过轴承连接,有利于提升两者相对转动的平稳性,并且减小相互间转动时的摩擦力。
50.本技术实施例还公开了一种电动车,包括控制器,以及前述实施例中的双前轮开合结构,双前轮开合结构的驱动组件140与控制器电连接。该电动车包含与前述实施例中的双前轮开合结构相同的结构和有益效果。双前轮开合结构的结构和有益效果已经在前述实施例中进行了详细描述,在此不再赘述。
51.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。