1.本发明涉及一种全向轮,尤其是涉及一种主动全向轮及其运动方法。
背景技术:
2.全向轮广泛应用于机器人、手推车、转移输送机、货运车、行李等移动装置的结构中,其主要由轮毂以及安装于轮毂上的从动轮组成,轮毂由驱动机构驱动,从动轮可以自由转动,由于轮毂的轴向方向与从动轮的轴向方向垂直,从而使得全向轮具备全向移动的能力。
3.现有的全向轮既能够通过轮毂电机(大轮)进行绕电机轴的轴向转动,又能够通过从动轮(小轮)的转动实现全向轮垂直于轮毂方向实现横向运动;但是全向轮绕电机轴的转动是通过电机轴来实现整体主动旋转,从动轮的转动却是通过全向轮与地面接触摩擦力来被动实现转动,无法实现主动旋转。
4.专利cn201120121753.x一种全向轮,就单个车轮而言,它可以实现轮子的前后滚动,但无法实现轮子的左右自主移动。
5.专利cn201611205333.3可全方位运动的全向轮,通过节轮驱动机构,将各节轮转轴与对位蜗杆转轴之间通过对应的传动机构连接,虽然能够实现全向轮任意方向下的受控运动,但是其驱动能力较弱,驱动反应时间较长,所需要的零件过多、装配困难。
技术实现要素:
6.发明目的:针对上述问题,本发明的目的是提供一种主动全向轮,实现轮子自主移动,优化结构,并提供了其运动方法。
7.技术方案:一种主动全向轮,包括轮毂架、轮毂驱动机构、节轮组,轮毂驱动机构包括主动驱动组件、节轮传动组件,主动驱动组件安装于轮毂架内部,节轮组在轮毂架的外周间隔均布有多个并分别与轮毂架连接,每个节轮组分别通过一个节轮传动组件与主动驱动组件连接,每个节轮传动组件分别穿设于轮毂架的周侧面。
8.进一步的,主动驱动组件包括第一轮毂端盖、第二轮毂端盖、大锥齿轮一、大锥齿轮二、第一驱动轴套、第二驱动轴套,第一轮毂端盖和第二轮毂端盖相对安装于轮毂架的相对两侧,两者之间相对间隔设有大锥齿轮一、大锥齿轮二,第一驱动轴套穿设于第一轮毂端盖并与其滚动连接,第二驱动轴套穿设于第二驱动轴套并与其滚动连接,第一驱动轴套一端与大锥齿轮一的中部固定连接,另一端连接驱动电机一,第二驱动轴套一端与大锥齿轮二的中部固定连接,另一端连接驱动电机二,每个节轮传动组件分别与大锥齿轮一、大锥齿轮二连接。
9.进一步的,节轮传动组件包括固轴锥齿轮、小锥齿轮一、小锥齿轮二、连接轴,固轴锥齿轮安装于节轮组上,连接轴穿设于轮毂架的周侧面并与其转动连接,连接轴的两端分别安装小锥齿轮一、小锥齿轮二,小锥齿轮一分别与大锥齿轮一、大锥齿轮二啮合,小锥齿轮二与固轴锥齿轮啮合。
10.进一步的,节轮组包括节轮、传动轴、防松螺母,传动轴水平安装于轮毂架的外周面上,传动轴的两端分别安装有一个节轮,每个节轮分别通过一个防松螺母限位。
11.最佳的,节轮为橡胶轮。轮表面有密集突出圆点且外轮廓线与全向轮外轮廓线相切合缝。
12.进一步的,轮毂架为正多边形框架结构,主动驱动组件设置于框架结构内部,每个外侧面上分别相对间隔设有一对支撑板,每对安装板上分别安装一个节轮组。
13.最佳的,节轮组的数量为4~8个。
14.最佳的,轮毂架为轻质高强度钢材框架。
15.一种上述的主动全向轮的运动方法,包括以下步骤:
16.(一)前进和后退:
17.步骤一:驱动电机一、驱动电机二同向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
18.步骤二:大锥齿轮一与大锥齿轮二具有朝相同方向转动的趋势;
19.步骤三:各小锥齿轮锁死,驱动电机一、驱动电机二带动全向轮整体转动而实现前进和后退;
20.(二)左移和右移:
21.步骤a:驱动电机一、驱动电机二反向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
22.步骤b:大锥齿轮一与大锥齿轮二朝相反方向相对转动;
23.步骤c:整体转动被抵消,各小锥齿轮转动带动节轮组转动,节轮组带动全向轮整体转动而实现左移和右移;
24.(三)任意方向移动:
25.步骤a:驱动电机一、驱动电机二差速反向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
26.步骤b:大锥齿轮一与大锥齿轮二差速反向转动;
27.步骤c:驱动电机一、驱动电机二的差速度使得全向轮整体转动,同时,各小锥齿轮转动带动节轮组转动;
28.步骤d:通过调节驱动电机一和驱动电机二的差速速率,调节移动方向,合成为全向轮的全方位运动。
29.有益效果:与现有技术相比,本发明的优点是:
30.1、本发明一种主动全向轮在两侧驱动电机相反驱动下能够产生一个使全向轮横移(左右方向)的速度矢量,同向驱动下能够产生一个使全向轮纵移(前后方向)的速度矢量,差速驱动下能够产生一个使全向轮斜移(任意方向)的速度矢量,从而达到全向移动能力。
31.2、本发明一种主动全向轮,通过紧密的齿轮传动,使得各方向的运动受控,能够减少被动滑移的影响,提高系统稳定性。
32.3、本发明一种主动全向轮,全向轮的左、右两侧均装有轴套,左、右轴套均可连接安装轮毂驱动电机,全向轮也可以作为独轮车、轮椅、自行车、机器人等的行走轮来使用。
33.4、本发明一种主动全向轮,节轮分段设置,在遇到楼梯等攀爬的场景,也具有一定
越障性。
34.5、本发明一种主动全向轮,简化了主动控制下的零件数量,降低了装配难度,为后续全向轮不同组合形式下的成本控制奠定了基础。
35.6、本发明一种主动全向轮,驱动组件、主动传动组件均采用齿轮传动,传动精度高、传动效率高。传动转化的可靠性和稳定性也得到大幅度提高。
36.7、本发明一种主动全向轮,在底盘上设置有至少一个上述主动全向轮,相对于现有的移动机构,传动的滞后性明显减小,传动转化的可靠性和稳定性高。
附图说明
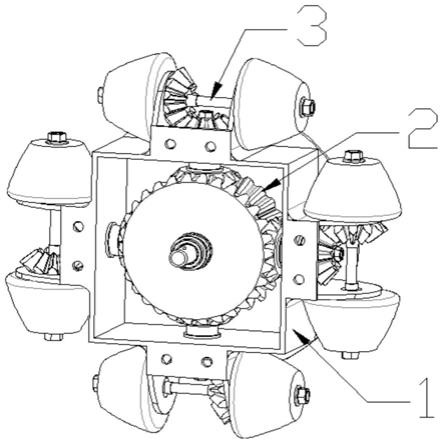
37.图1为本发明去除轮毂端盖后的立体结构示意图;
38.图2为本发明的爆炸等轴视图;
39.图3为本发明的正剖面视图;
40.图4为本发明的侧剖面视图;
41.图5为轮毂架的结构图;
42.图6为主动驱动组件的部分结构图;
43.图7为节轮组的结构图;
44.图8为本发明的正视结构图;
45.图9为本发明应用1的示意图;
46.图10为本发明应用2的示意图;
47.图11为本发明应用3示意图;
48.图12为本发明应用4示意图。
具体实施方式
49.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
50.一种主动全向轮,如图1~8所示,包括轮毂架1、轮毂驱动机构2、节轮组3,轮毂驱动机构2包括主动驱动组件、节轮传动组件。
51.轮毂架1为正多边形框架结构,材料为轻质高强度钢材,主动驱动组件设置于框架结构内部,每个外侧面上分别相对间隔设有一对支撑板11,支撑板11间连接部分存在用于分别安设主动驱动组件的安装孔,节轮组3在轮毂架1的外周间隔均布有多个,每对安装板11上分别安装一个节轮组3,节轮组3的数量为4~8个,节轮组3包括节轮31、传动轴32、防松螺母34,节轮31为橡胶轮,传动轴32穿设于一对支撑板11中并与其转动连接,传动轴32的两端分别安装有一个节轮31,每个节轮31分别通过一个防松螺母34限位。
52.每个节轮组3分别通过一个节轮传动组件与主动驱动组件连接,主动驱动组件包括第一轮毂端盖21、第二轮毂端盖22、大锥齿轮一23、大锥齿轮二24、第一驱动轴套25、第二驱动轴套26,第一轮毂端盖21和第二轮毂端盖22相对安装于轮毂架1的相对两侧,两者之间相对间隔设有大锥齿轮一23、大锥齿轮二24,第一驱动轴套25穿设于第一轮毂端盖21并与其滚动连接,第二驱动轴套26穿设于第二驱动轴套26并与其滚动连接,横穿部分及内侧分别通过滚动轴承与推力球轴承减少相对转动摩擦,第一驱动轴套25一端与大锥齿轮一23的
中部固定连接,另一端连接驱动电机一,第二驱动轴套26一端与大锥齿轮二24的中部固定连接,另一端连接驱动电机二。
53.每个节轮传动组件分别与大锥齿轮一23、大锥齿轮二24连接,节轮传动组件包括固轴锥齿轮33、小锥齿轮一35、小锥齿轮二36、连接轴37,固轴锥齿轮33安装于节轮组3上,连接轴37穿设于轮毂架1的周侧面并与其转动连接,连接轴37的两端分别安装小锥齿轮一35、小锥齿轮二36,小锥齿轮一35分别与大锥齿轮一23、大锥齿轮二24啮合,小锥齿轮二36与固轴锥齿轮33啮合。小锥齿轮一35、小锥齿轮二36、连接轴37形成同速、同向条件,通过推力球轴承置于轮毂架1外部一对支撑板11中心。
54.第一驱动轴套25、第二驱动轴套26分别连接动力源,从而提供初始动力,使得大锥齿轮一45、大锥齿轮二46转动,其转动方式将影响到整体全向轮的移动方式。
55.两个节轮31分置于圆周均布的支撑板11外侧,节轮31外轮廓线与全向轮外轮廓线相切合缝,节轮31为耐磨橡胶材质,外表面有密集突出圆点,分布满足d1≈d2条件,能够提高滚动自适应力、防滑抓地能力与攀爬阶梯能力,并通过传动轴32同轴横穿支撑板11上的圆孔,传动轴32的横穿部位通过滚动轴承减少相对摩擦阻力,传动轴32上设有轴肩,通过轴肩限制轴承轴向串动,同时传动轴32首尾端设有螺纹,通过防松螺母34的紧固,将节轮限制在固定位置,使得拆卸更换破损后的节轮相当便捷。固轴锥齿轮33与传动轴32固连,随着固轴锥齿轮33转动,带动节轮31转动。
56.如图1所示,大椎齿轮通过齿轮传动使得各小锥齿轮转动,达到各方向驱动的基本标准。
57.如图9至图12所示,一种主动全向轮可为应用1、应用2、应用3、应用4中的行走轮。
58.上述的主动全向轮的运动方法,包括以下步骤:
59.(一)前进和后退:
60.步骤一:驱动电机一、驱动电机二同向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
61.步骤二:大锥齿轮一与大锥齿轮二具有朝相同方向转动的趋势;
62.步骤三:各小锥齿轮锁死,驱动电机一、驱动电机二带动全向轮整体转动而实现前进和后退;
63.(二)左移和右移:
64.步骤a:驱动电机一、驱动电机二反向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
65.步骤b:大锥齿轮一与大锥齿轮二朝相反方向相对转动;
66.步骤c:整体转动被抵消,各小锥齿轮转动带动节轮组转动,节轮组带动全向轮整体转动而实现左移和右移;
67.(三)任意方向移动:
68.步骤a:驱动电机一、驱动电机二差速反向驱动,通过第一驱动轴套、第二驱动轴套分别将动力传递给大锥齿轮一、大锥齿轮二;
69.步骤b:大锥齿轮一与大锥齿轮二差速反向转动;
70.步骤c:驱动电机一、驱动电机二的差速度使得全向轮整体转动,同时,各小锥齿轮转动带动节轮组转动;
71.步骤d:通过调节驱动电机一和驱动电机二的差速速率,调节移动方向,合成为全向轮的全方位运动。