一种利用移动uwb节点的相对方位解算装置
技术领域
1.本实用新型涉及自动跟随装置技术领域,具体为一种利用移动uwb节点的相对方位解算装置。
背景技术:
2.通信技术与各种相关应用在需求的催化下相互促进不断更新,如今的通信技术所能承受的应用还没有达到饱和,跟随技术便是其一。虽然现有的跟随需求有很多种技术方案,也出现了一些实际应用的案例,但从用户体验上,灵活性上,环境适应性等方面还无法完全满足人们对跟随技术的需求。现有的自动跟随装置主要采用以下技术:
3.(1)蓝牙(bluetooth)、wifi跟随技术
4.这两种的跟随定位方法类似,都是根据接收信号的强度配合定向天线来进行距离与角度定位。定位精度差,做跟随无法实现良好的用户体验。
5.(2)gps跟随技术
6.gps定位技术经过几十年的发展已经非常成熟,缺点是局限于室外的、对精度要求不高的情况。对于室内场所、小面积场所,卫星信号比较弱,导致定位精度低无法使用gps。
7.(3)机器视觉跟随技术
8.通过机器视觉来进行定位,现在的机器视觉技术比较成熟,跟随效果在这几种跟随技术里面也是最好的。缺点是穿透能力差,怕遮挡,对光的变化比较敏感,光线过暗过强都会影响图像的识别,系统较其他技术也要复杂很多,成本比较高。
9.(4)超声波跟随技术
10.通过超声波来进行定位,无论距离精度还是角度精度都非常高,成本也比较低廉,缺点是容易受到干扰,系统比较复杂。
11.(5)超宽带(ultra wide band)跟随技术
12.简称uwb测距技术,uwb节点的点对点定位与wifi、蓝牙定位方法类似,仅局限于距离定位,通过非正弦波窄带脉冲信号传播数据,抗干扰能力强,距离精度可达厘米级。一般情况下,跟随技术的关键点在于方位角的确定。现有的方位角测量都是在跟随端使用两个节点,分别测量与被跟随节点的距离,再根据余弦定理以及简单的逻辑关系计算得到实时的角度。该技术目前主要应用场景包括自动跟随行李箱,以及自动跟随购物车等等对系统容量要求不高的系统。
13.现有技术存在以下缺陷或问题:
14.现有的uwb跟随装置,跟随车上有两个uwb节点a和b,它们之间的距离已知,被跟随车上有一个节点c,a和b可以分别测量到c的距离,这样就构成三角形,可以据此调整车的行进方向,装置需要使用三个uwb节点,提高装置成本和复杂性,也提高了对装置系统容量的要求。
技术实现要素:
15.本实用新型的目的在于针对现有技术的不足之处,提供一种利用移动uwb节点的相对方位解算装置,以解决背景技术中提出的问题。
16.为实现上述目的,本实用新型提供如下技术方案:一种利用移动uwb节点的相对方位解算装置,包括自动跟随车和被跟随车,所述自动跟随车的表面固定连接有节点a,所述被跟随车的表面固定连接有节点b,所述自动跟随车的底部固定连接有测速装置,所述自动跟随车的内部设置有控制芯片。
17.作为本实用新型的优选技术方案,所述自动跟随车可匀速移动。
18.作为本实用新型的优选技术方案,所述节点a和节点b都采用uwb测距技术。
19.作为本实用新型的优选技术方案,所述控制芯片与节点a电连接,所述节点a和节点b之间通过信号连接。
20.作为本实用新型的优选技术方案,所述测速装置与控制芯片电连接。
21.作为本实用新型的优选技术方案,所述控制芯片还与自动跟随车电连接。
22.与现有技术相比,本实用新型提供了一种利用移动uwb节点的相对方位解算装置,具备以下有益效果:
23.该一种利用移动uwb节点的相对方位解算装置,通过设置自动跟随车、节点a、被跟随车、节点b、测速装置和控制芯片,在自动跟随车上设置采用uwb的节点a,自动跟随车可以匀速移动,在被跟随车上设置采用uwb的节点b,根据自动跟随车移动前后与被跟随车的位置关系和距离可计算出自动跟随车的行进方向进行自动调整,从而只需要两个uwb节点就可以达到自动跟随的效果,降低了装置成本和复杂性,也降低了对装置系统容量的要求。
附图说明
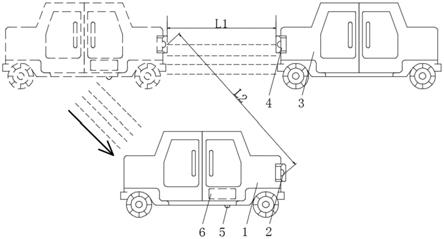
24.图1为本实用新型结构示意图;
25.图2为本实用新型图1自动跟随车移动后示意图。
26.图中:1、自动跟随车;2、节点a;3、被跟随车;4、节点b;5、测速装置;6、控制芯片。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1-2,本实施方案中:一种利用移动uwb节点的相对方位解算装置,包括自动跟随车1和被跟随车3,自动跟随车1的表面固定连接有节点a2,被跟随车3的表面固定连接有节点b4,自动跟随车1的底部固定连接有测速装置5,自动跟随车1的内部设置有控制芯片6。测速装置5用于通过控制芯片6监测和控制自动跟随车1的行驶速度。
29.本实施例中,自动跟随车1可匀速移动。匀速行驶时通过测速装置5的速度,再根据匀速行驶的时间可计算出行驶的距离。节点a2和节点b4都采用uwb测距技术。方便节点a2和节点b4之间通过信号连接。控制芯片6与节点a2电连接,节点a2和节点b4之间通过信号连接。方便控制芯片6通过节点a2随自动跟随车1移动前后和节点b4的距离和角度关系。测速
装置5与控制芯片6电连接。方便控制芯片6直接计算出自动跟随车1的行驶速度。控制芯片6还与自动跟随车1电连接。方便控制芯片6控制自动跟随车1行驶。
30.本实用新型的工作原理及使用流程:在自动跟随车1上设置采用uwb的节点a2,使自动跟随车1可以匀速移动,匀速移动一秒后停止,根据其上设置的测速装置5,测出匀速行驶的速度,由控制芯片6直接计算出自动跟随车1这一秒行驶的距离。在被跟随车3上设置采用uwb的节点b4,通过节点a2和节点b4的信号连接,由控制芯片6计算出自动跟随车1移动前后与被跟随车3的位置关系和距离,即可计算出自动跟随车1的行进方向并进行自动调整,从而只需要两个uwb节点就可以达到自动跟随的效果,降低了装置成本和复杂性,也降低了对装置系统容量的要求。
31.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种利用移动uwb节点的相对方位解算装置,其特征在于:包括自动跟随车(1)和被跟随车(3),所述自动跟随车(1)的表面固定连接有节点a(2),所述被跟随车(3)的表面固定连接有节点b(4),所述自动跟随车(1)的底部固定连接有测速装置(5),所述自动跟随车(1)的内部设置有控制芯片(6)。2.根据权利要求1所述的一种利用移动uwb节点的相对方位解算装置,其特征在于:所述自动跟随车(1)可匀速移动。3.根据权利要求1所述的一种利用移动uwb节点的相对方位解算装置,其特征在于:所述节点a(2)和节点b(4)都采用uwb测距技术。4.根据权利要求1所述的一种利用移动uwb节点的相对方位解算装置,其特征在于:所述控制芯片(6)与节点a(2)电连接,所述节点a(2)和节点b(4)之间通过信号连接。5.根据权利要求1所述的一种利用移动uwb节点的相对方位解算装置,其特征在于:所述测速装置(5)与控制芯片(6)电连接。6.根据权利要求1所述的一种利用移动uwb节点的相对方位解算装置,其特征在于:所述控制芯片(6)还与自动跟随车(1)电连接。
技术总结
本实用新型公开了一种利用移动UWB节点的相对方位解算装置,包括自动跟随车和被跟随车,所述自动跟随车的表面固定连接有节点A,所述被跟随车的表面固定连接有节点B,所述自动跟随车的底部固定连接有测速装置,所述自动跟随车的内部设置有控制芯片。该利用移动UWB节点的相对方位解算装置,通过设置自动跟随车、节点A、被跟随车、节点B、测速装置和控制芯片,在自动跟随车上设置采用UWB的节点A,自动跟随车可匀速移动,在被跟随车上设置节点B,根据自动跟随车移动前后与被跟随车的位置关系和距离计算出自动跟随车的行进方向,从而只需要两个UWB节点就可以达到自动跟随的效果,降低了装置成本和复杂性,也降低了对装置系统容量的要求。要求。要求。
技术研发人员:孙大洋 李红阳 汪晨光 施子凌 王宇骞
受保护的技术使用者:吉林大学
技术研发日:2021.08.11
技术公布日:2022/2/8