1.本公开涉及智能交通技术领域,尤其涉及一种基于驾驶员主观风险感受的行车安全场构建方法。
背景技术:
2.自动驾驶是当前的研究热点,然而自动驾驶车辆的普及不仅需要在安全性、可操作性、舒适性和经济性等方面达到最佳性能,还需要解决人类驾驶员和乘客的接受度和信任度的问题。人类驾驶员能否适应车辆控制器的驾驶方式,车辆的权限能否从一方平稳过渡到另一方,是智能驾驶普及过程中必须面对的问题。主流的解决方案是在自动驾驶控制器中考虑不同人类驾驶员的驾驶风格,从而实现类人驾驶,尽量减少与驾驶者偏好的冲突。
3.在类人驾驶车辆的设计中,最常见的方法之一是在自动控制器中考虑驾驶员模型,该模型可以捕捉驾驶员不同的转向参数,如预瞄时间、延迟时间和转向增益等。然而,在自动驾驶车辆设计过程中,很少考虑到在决策中起关键作用的驾驶员偏好。人类驾驶员在动态驾驶场景中对相同风险的敏感度不同,这将影响其舒适度和驾驶行为。因此,如何为不同的用户提供不同安全和舒适程度的驾驶方式,从而增加自主驾驶系统和高级驾驶辅助系统的使用量是亟需解决的问题。
技术实现要素:
4.本公开提供了一种基于驾驶员主观风险感受的行车安全场构建方法,其技术目的是根据驾驶员在避障过程中所能接受的最大侧向加速度,来设计符合驾驶员主观感受的环境势场,从而将驾驶员对周边环境的主观感受融入到自动驾驶控制器的设计中。
5.本公开的上述技术目的是通过以下技术方案得以实现的:
6.一种基于驾驶员主观风险感受的行车安全场构建方法,所述安全场包括基于驾驶员主观风险感受的障碍物势场,所述障碍物势场包括障碍物车前后的可触碰约束区域α和障碍物车车体本身的不可触碰约束区域β,该方法包括:
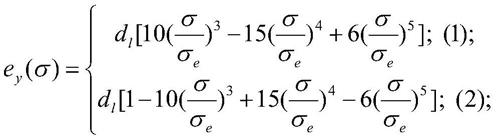
7.s1:使用多项式曲线轨迹表示避障轨迹,即:
[0008][0009]
其中,ey表示主车在曲线坐标系中的横向位置坐标;σ表示主车在曲线坐标系中的纵向位置坐标;σe表示避障距离;d
l
表示主车的横向换道距离;
[0010]
s2:根据主车侧向加速度ay与避障轨迹曲率λ之间的关系以及所述多项式曲线轨迹,得到在驾驶员可接受的最大侧向加速度a
y,m
下驾驶员期望的避障距离σe;
[0011]
[0012]
则有:
[0013]
其中,v
x
表示主车纵向车速;表示一个常数;r表示道路结构的半径;d
l
表示主车的横向换道距离;σm表示曲率最大位置处的纵向位置坐标;
[0014]
s3:根据避障距离σe得到可触碰约束区域α的范围由得到其中,σ
com
表示可触碰约束区域α的拉伸系数;
[0015]
s4:根据主车当前的实际位置p(σ,ey),得到主车与障碍物车之间的距离d
com
,当主车位于可触碰约束区域α时,有:
[0016][0017]
当主车位于车体不可触碰约束区域β时,有:
[0018][0019]
其中,σo和e
yo
分别表示障碍物车在曲线坐标系中的纵向坐标位置和横向坐标位置,σ
com
和e
y,com
表示可触碰约束区域α的拉伸系数;σ
saf
和e
y,saf
表示不可触碰约束区域β的拉伸系数,d
saf
表示在安全拉伸系数作用下主车质心和障碍物车质心之间的距离;d
os
表示两车质心之间的最小安全距离;
[0020]
s5:最终由主车与障碍物之间的距离d
com
、障碍物可触碰约束区域α及不可触碰约束区域β的影响范围,得到主车驾驶员对于障碍物的主观感受j
obs
(σ,ey):
[0021][0022]
其中,a0和a1都表示权重系数;κ
obs
表示函数的次方。
[0023]
本公开的有益效果在于:本技术所述的基于驾驶员主观风险感受的行车安全场构建方法,考虑到了人类驾驶员在动态驾驶场景中对相同风险的不同感受,及其对驾驶员舒适度和驾驶行为的影响。采用驾驶员在避障过程中可接受的最大侧向加速度的差异提取驾驶员的异质性,提出了一种曲线坐标系下多项式单移线避障轨迹的曲率计算方法,能够得到弯曲道路上车辆避障距离与驾驶员最大可接受侧向加速度的关系,并以此来调整周边环境势场的范围,使其更符合驾驶员的主观感受。基于该方法设计的自主驾驶车辆,能够为不同的用户提供不同的安全和舒适的驾驶方式,做到个性化类人驾驶,有效提高驾驶员和乘客的乘坐舒适性,具有很强的实用性,以及广阔的商业应用前景。
附图说明
[0024]
图1为本技术所述方法的流程图;
[0025]
图2为障碍物势场设计原理示意图;
[0026]
图3为弯曲道路障碍物势场三维图;
[0027]
图4为车道边界势场设计原理示意图;
[0028]
图5为弯曲道路车道边界势场三维图;
[0029]
图6为换道距离和驾驶员可接受最大侧向加速度的关系示意图。
具体实施方式
[0030]
下面将结合附图对本公开技术方案进行详细说明。
[0031]
人工势场方法是一种常用的轨迹重规划方法,经常被用来设计客观的驾驶安全场。但很少采用它来描述驾驶员对风险的主观感受,以及障碍物对不同驾驶员的影响。本技术通过对障碍物势场的调整,来描述驾驶员在主观风险感知上的个体差异,从而模仿驾驶员来采取行动,利用油门/刹车踏板和方向盘离开当前的危险状况。在换道碰撞避免过程中,变道行为的轨迹和耗时取决于主车当前的纵向速度v
x
和最大侧向加速度a
y,m
。假设主车行驶过程中纵向车速变化不大,本技术采用侧向加速度来提取驾驶员的异质性。
[0032]
当自动驾驶车辆(主车)在结构化道路上行驶时,其运动受到道路环境的限制,禁止撞击障碍物和超出车道边界。对于同样的障碍物,个性化驾驶员的风险认知是不同的。有的司机比较保守,在离障碍物较远的时候会开始慢慢变道;而有的人则比较激进,他们喜欢较高的避撞效率,在离障碍物相对较近的时候会快速变道。一般可以通过驾驶员的试驾或者对于驾驶模式的选择(激进/保守)来提取出驾驶员的保守程度,采用驾驶过程中所能接受的最大侧向加速度来量化的描述这一驾驶偏好,驾驶员越激进,同一客观风险的驾驶环境中,他所能接收的最大侧向加速度越大。
[0033]
本技术采用障碍物势场来描述驾驶员对障碍物的个体风险感知,障碍物势场的设计应满足以下目标:(1)势场的影响范围可随意调整;(2)适合任意曲率的道路;(3)变化平稳,防止主车突然遇到很高的势场,引起方向盘转角的剧烈变化。如图2所示,障碍车的势场主要分为两部分,一个是障碍物车体的不可触碰约束区域(见图2中的β区域),用于防止与自动驾驶车辆发生碰撞,它对车辆的安全性有重要影响,势场值很高;另一个是障碍物车前后的可触碰约束区域(见图2中的区域α),使得障碍物车的影响范围沿道路几何方向延伸,可以帮助自主驾驶车辆根据驾驶员的个体风险感知进行变道操作。
[0034]
图1为障碍物势场构建的流程图,障碍物势场设计的三维图如图3所示,障碍物势场设计适用于任意曲率道路,高低部分为车体区域(不可触碰约束区域)β,两侧延伸部分为可触碰约束区域α。α和β的形状可以通过拉伸系数σ
com
、e
y,com
、σ
saf
、e
y,saf
来任意调整,有利于构建符合驾驶员主观风险感知的障碍物势场。
[0035]
对于个性化的驾驶员来说,他们的主观风险感知是不同的,对于避撞效率或变道动作所需时间的偏好也是不同的。因此,他们选择的避障距离是不同的。本技术采用个性化驾驶员在避障过程中可接受的最大侧向加速度a
y,m
来描述驾驶员的风险感知差异,较小的a
y,m
意味着更敏感的风险感知,更低的避障效率和更长的避障距离,而较大的a
y,m
则相反。
[0036]
侧向加速度ay和避障轨迹曲率λ之间的关系可以表示为:
[0037]vx
表示主车纵向车速,当主车纵向车速变化不大时,最大侧向加速度a
y,m
与避障轨迹最大曲率λm直接相关。一个避障行为可以转化为两个单移线换道操作,可以用曲线坐标系下的多项式曲线轨迹来表示:
[0038][0039]
其中,ey表示主车在曲线坐标系中的横向位置坐标;σ表示主车在曲线坐标系中的纵向位置坐标;σe表示避障距离;d
l
表示主车的横向换道距离。
[0040]
式(1)用于让主车在遇到障碍物时变更到预定车道,式(2)用于让主车变更回初始目标车道。由于曲线坐标系的建立是基于弯曲的参考路径,因此不能采用常用的直角坐标系中的曲率方程来计算多项式曲线轨迹的避障轨迹曲率λ。假设一小段路径的曲率是不变的,本技术采用极坐标系来计算单移线轨迹的曲率。
[0041]
已知:x=r(θ)cosθ,y=r(θ)sinθ,则他们的导数和二阶导数可以表示为:
[0042][0043][0044]
则避障轨迹曲率λ可以写成:
[0045][0046]
其中,r=r-ey,θ=σ/r,;r表示道路结构的半径;r表示主车质心到道路中心的距离。
[0047]
则
[0048]
假设d
l
<<σe,d
l
<<r,则因此可以假设那么避障轨
迹曲率λ可以被简化为:
[0049][0050]
定义σm为避障轨迹曲率最大位置处的纵向位置坐标,则σm/σe可以通过dλ/dσ来计算,在ey<<r的情况下,dλ/dσ可以近似地表示为:
[0051][0052]
可以得到:
[0053]
则最大避障轨迹曲率λm表示为:
[0054][0055]
其中,表示一个常数。由于侧向加速度ay和避障轨迹曲率λ之间的关系已知,则避障距离σe与驾驶员可接受的最大侧向加速度a
y,m
之间的关系为:
[0056][0057]
作为具体实施例地,当道路半径为100m,主车纵向速度为10m/s,不同驾驶员选择的避障距离σe与可接受的最大侧向加速度a
y,m
之间的关系如图6所示。
[0058]
然后根据避障距离σe得到可触碰约束区域α的范围由得到其中,σ
com
表示可触碰约束区域α的拉伸系数。
[0059]
由得到主车距离障碍物车的距离d
com
,即当主车位于可触碰约束区域α时,有:
[0060][0061]
其中,σo和e
yo
分别表示障碍物车在曲线坐标系中的纵向坐标位置和横向坐标位置,σ
com
和e
y,com
表示可触碰约束区域α的拉伸系数。
[0062]
另外,当主车位于障碍物车体的不可触碰约束区域β时,有:
[0063][0064]
其中,σ
saf
和e
y,saf
都表示不可触碰区域β的拉伸系数;d
saf
表示在安全拉伸系数作用下主车质心和障碍物车质心之间的距离;d
os
表示两车质心之间的最小安全距离。
[0065]
最后根据主车与障碍物车之间的距离d
com
、障碍物可触碰约束区域α及不可触碰约束区域β的影响范围,得到主车驾驶员对于障碍物的主观感受j
obs
(σ,ey),即:
[0066][0067]
其中,p表示主车的位置,a0和a1都表示权重系数;κ
obs
表示函数的次方。
[0068]
另外,在自主驾驶车辆行驶过程中不仅要考虑障碍物的危险,还要保持在车道内行驶,不能超出车道边界。设计了车道边界的强势场限制,防止主车超出车道;同时还有道路中心线的弱势场约束,即在遭遇障碍物之前进行车道保持,且车道外的势场与车道边界处相同,车道边界势场设计的原理如图4所示,对应地图5即为弯曲道路车道边界势场三维图。
[0069]
则车道边界势场j
lp
(σ,ey)的具体设计包括:
[0070][0071]
其中,d
lp
(σ,ey)=min[lane
l-ey,e
y-laner]表示主车到左车道、右车道边界的最小距离;d
ls
为主车到车道边界的最小安全距离;d
ms
为主车到车道中心线的最小安全距离;w
l
为一个车道的宽度;a
q1
和a
q2
为权重系数,分别表示车道边界和车道中心的增益;κ表示函数的次方。
[0072]
根据所设计的车道边界势场和障碍物势场,能够引导无人驾驶汽车进行安全的驾驶。同时,由于所设计的障碍物势场考虑到不同驾驶员避障时的保守性偏好,采用障碍物势场进行无人驾驶车辆控制器设计时,能够针对不同的驾驶员进行类人化驾驶,极大提高驾驶员和乘客的舒适性。
[0073]
以上描述了本技术的基本原理、主要特征和本技术的优点。本领域技术人员应该了解,本技术不受上述实例的限制,上述实例和说明书中描述的只是说明本技术的原理,在不脱离本技术精神和范围的前提下本技术还会有各种变化和改进,这些变化和改进都落入
本技术要求保护的范围内。本技术要求保护范围由所附的权利要求书及其等同物界定。