1.本发明属于光学测量技术领域,具体涉及一种车载精密光学设备振动防翻监控系统及方法。
背景技术:
2.车载经纬仪等需要在恶劣路况以及砂石路面快速高机动快速转运的精密光学设备,在运输过程中,通常需要兼顾运输速度和设备可靠性。但是,受制于载车隔振性能上限,较差路况下若行驶速度过快,则从路面传输到光学设备上的振动能量无法得到有效衰减,高精度光学经纬仪以及其他光学设备光学装调精度容易因紧固松动、配重铅块掉落等出现故障,高精度光学设备存在因振动工况恶劣从而使得精度下降的可能性。
3.目前高精度的光学设备转运,运输人员需要在转场途中,人工每间隔一定时间检查设备防翻和设备自身运输辅助加工工装状态,以避免因振动导致辅助工装松动以及配重铅块掉落的情况,即需要人工操作环节较多。且受制于可能出现的运输故障以及运输辅助工装松动等问题,需要经常停车检查,耽误运输时间。
技术实现要素:
4.本发明为解决上述问题,提供一种新型车载精密光学设备振动防翻监控系统及方法。
5.为实现上述目的,本发明采用以下具体技术方案:
6.本发明提供一种车载精密光学设备振动防翻监控系统,包括监控主机及传感器模组;
7.所述传感器模组通过无线直连所述监控主机,用于检测所述精密光学设备的信息;
8.所述传感器模组包括振动传感器和拉力传感器;
9.所述监控主机包括信号接收模块、信号处理模块以及显示模块,所述信号接收模块用于设定所述振动传感器的报警阈值和所述拉力传感器的报警阈值,还用于设定所述精密光学设备的运输任务;
10.所述信号处理模块用于将所述传感器模组检测到的信息记录并传递至所述显示模块;
11.所述显示模块用于显示所述精密光学设备在运输过程中的状态信息。
12.优选地,所述振动传感器设置于所述精密光学设备上,所述拉力传感器设置于连接所述精密光学设备与载车的防翻缆绳中间。
13.优选地,所述振动传感器为三轴加速度振动传感器,用于实时检测所述精密光学设备在运输过程中的加速度值。
14.优选地,所述拉力传感器的数量与所述防翻缆绳的数量一致,所述防翻缆绳为多个。
15.优选地,所述传感器模组还包括速度传感器,所述速度传感器用于检测车速。
16.优选地,所述传感器模组还包括辅助传感器,所述辅助传感器选自视频监控传感器或载车油气悬挂气压传感器中的至少一种。
17.优选地,所述振动防翻监控系统还包括视频信号采集装置,用于实时采集所述精密光学设备的视频信号。
18.优选地,所述振动防翻监控系统还包括报警指示装置,所述报警指示装置通过硬件直连所述监控主机,用于在报警状态下进行指示。
19.优选地,通过运输所述精密光学设备的载车的供电系统实现对所述传感器模组供电。
20.另一方面,本发明还提供一种车载精密光学设备振动防翻监控方法,采用上述的振动防翻监控系统,所述振动防翻监控方法包括步骤:
21.s1、准备对所述精密光学设备进行转场运输;
22.s2、开始对所述精密光学设备进行运输过程中的检测;
23.s3、判断振动传感器是否超限,若是,则停车检查,若否,则执行步骤s4;
24.若所述振动传感器检测到的实时加速度值超过设定的加速度阈值,则判断振动传感器是超限;
25.s4、判断拉力传感器的拉力量值是否一致,若是,则正常运输,若否,则停车检查;
26.若所述拉力传感器的实时拉力均值与初始拉力均值相差在设定范围之内,则判断拉力传感器的拉力量值是一致。
27.本发明所提供的车载精密光学设备振动防翻监控系统,通过将振动、拉力和视频监控集成的方案,实现了运输状态下,精密光学设备健康监控的功能。通过振动传感器检测当前设备运输工装刚度情况,若发生因路面情况导致的设备松动以及防翻功能失效,则通过监控主机提醒驾驶人员;通过拉力传感器检测当前设备运输过程中,防翻缆绳的拉力状态,确认设备是否处于平衡稳定的状态;同时,进一步通过视频监控,保证运输人员在不停车状态下,能够实时了解运输过程中的设备状态,方便快捷的实现对精密光学设备的转场运输,显著减少运输过程中人工下车操作的环节。
附图说明
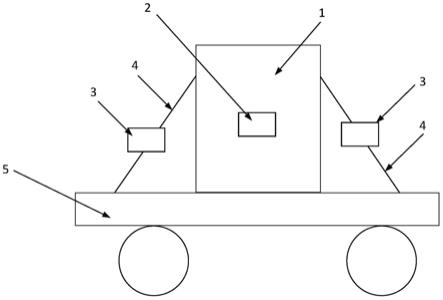
28.图1是本发明一种实施例中车载精密光学设备振动防翻监控系统结构原理示意图。
29.图2是本发明一种实施例中车载精密光学设备振动防翻监控系统信号及电连接示意图。
30.图3是本发明一种实施例中拉力传感器结构示意图。
31.图4是本发明一种实施例中车载精密光学设备振动防翻监控方法流程示意图。
32.附图标记
33.精密光学设备1、振动传感器2、拉力传感器3、防翻缆绳4、载车底盘5。
具体实施方式
34.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施
例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
35.如图1和图2所示,图1为本发明一种实施例中车载精密光学设备振动防翻监控系统结构原理示意图,图2为本发明一种实施例中车载精密光学设备振动防翻监控系统信号及电连接示意图。
36.从图1中可以看出,本发明提供一种实施例中车载精密光学设备振动防翻监控系统,精密光学设备1置于载车底盘5上,通过车载运输,振动防翻监控系统主要包括监控主机及传感器模组;所述传感器模组通过无线直连所述监控主机,用于检测所述精密光学设备1的信息;所述传感器模组包括振动传感器2和拉力传感器3;所述监控主机包括信号接收模块、信号处理模块以及显示模块,所述信号接收模块用于设定振动传感器2的报警阈值和拉力传感器3的报警阈值,还用于设定精密光学设备1的运输任务;所述信号处理模块用于将所述传感器模组检测到的信息记录并传递至所述显示模块;所述显示模块用于显示精密光学设备1在运输过程中的状态信息。振动传感器2的报警阈值可以为设定的加速度阈值,拉力传感器3的报警阈值可以为拉力传感器3的实时拉力均值与初始拉力均值相差的设定范围。
37.具体实施方式中,所述振动传感器2设置于所述精密光学设备1上,主要用于监控在运输过程中,精密光学设备受到的振动情况;具体的,所采用的振动传感器2为三轴加速度振动传感器,用于实时检测精密光学设备1在运输过程中的加速度值。
38.具体实施方式中,所述拉力传感器3设置于连接所述精密光学设备1与载车的防翻缆绳4中间。所述拉力传感器3的数量与所述防翻缆绳4的数量一致,即在每一条连接精密光学设备1与载车之间的防翻缆绳的中间均设有拉力传感器3。优选的,防翻缆绳4和拉力传感器3均为多个,可以为2个、3个、4个、5个或6个等等,具体可根据实际所运输的精密光学设备来设定。具体以车载精密光学经纬仪的运输为例,可以设置四个防翻缆绳4和四个拉力传感器3。
39.具体实施方式中,拉力传感器3的结构如图3所示,从图中可以看出,本发明具体实施例所用的拉力传感器3自带有双头螺纹孔,可以穿夹在防翻缆绳4中,能够更好的起到检测对应防翻缆绳4的拉力值的作用,从而实现对不同防翻缆绳4之间拉力值的比较。
40.具体实施方式中,监控主机可以为集成无线信号接收、信号处理以及状态显示等软硬件功能合一的电脑主机,也可以为其他包括三大功能模块的任一系统,主要起到信号接收、信号处理以及状态显示的功能即可。
41.优选的实施方式中,传感器模组还包括速度传感器,速度传感器用于检测车速,具体的用于输出记录日志时,当前状态下的载车车速。传感器模组还可以包括辅助传感器,具体的,辅助传感器可以选自视频监控传感器或载车油气悬挂气压传感器中的至少一种。通过增加视频监控传感器,可以直接观看精密光学设备1当前状态,给驾驶人员判断运输状态设备是否有紧固件未安装、设备是否存在零部件脱落等情况。而载车油气悬挂气压传感器等,则可以兼容本发明的振动防翻监控系统系统,通过无线发送模块接入本系统监控主机的信号接收模块,从而判断载车在运输状态下,悬挂系统是否工作正常;如果载车油气悬挂气压传感器读数和初始值偏离过大,载车在运输状态容易出现左右轮胎不一致负载的情况,设备收到的振动冲击变大,此状态下,则需要停车检查、调整;通过进一步增加设置载车
油气悬挂气压传感器,可以更好的监控整个运输过程中,精密光学设备1的状态。在传感器模组还包括除振动传感器2和拉力传感器3之外的其他传感器时,信号接收模块除了用于设定振动传感器2的报警阈值和拉力传感器3的报警阈值,还可以用于设定其他传感器对应的报警阈值。
42.具体实施方式中,本发明的振动防翻监控系统还包括视频信号采集装置,用于实时采集精密光学设备1的视频信号,以便与振动传感器2以及拉力传感器3配合,从而对所运输的精密光学设备1进行实时监控,实时获取各项状态信息。具体的,视频信号采集装置可以为摄像头等,通过摄像头采集的视频信号可通过硬盘录cvr或者其他方式进行存储,同时,可传输至监控主机,通过监控主机显示视频画面。
43.优选地,所述振动防翻监控系统还包括报警指示装置,所述报警指示装置通过硬件直连所述监控主机,用于在报警状态下进行指示。具体的,报警指示装置可以为报警指示灯等。
44.如图2所示,从图2中可以看出,具体可以通过运输所述精密光学设备1的载车的供电系统实现对所述传感器模组供电,即通过载车的acc系统取电。具体的,可以通过载车中的电池管理系统进行供电,电池管理系统集成于载车的车载电瓶中,在载车启动时,传感器模组即开始通电工作,整个振动防翻监控系统也即自动开始工作。
45.另一方面,本发明还提供一种车载精密光学设备振动防翻监控方法,具体采用上述的振动防翻监控系统。
46.如图4所示,本发明一种具体实施例中提供的振动防翻监控方法包括步骤:
47.s1、准备对所述精密光学设备进行转场运输;
48.s2、开始对所述精密光学设备进行运输过程中的检测;
49.s3、判断振动传感器是否超限,若是,则停车检查,若否,则执行步骤s4;
50.若所述振动传感器检测到的实时加速度值超过设定的加速度阈值,则判断振动传感器是超限;
51.s4、判断拉力传感器的拉力量值是否一致,若是,则正常运输,若否,则停车检查;
52.若所述拉力传感器的实时拉力均值与初始拉力均值相差在设定范围之内,则判断拉力传感器的拉力量值是一致。
53.具体实施方式中,以运输车载光学经纬仪为例,在运输前,先根据车载光学经纬仪的设备情况设定一个加速度阈值,振动传感器2主要用于在运输过程中实时读取车载光学经纬仪的加速度值;设定的报警阈值具体可以按等级分为不同的报警阈值,具体的,加速度阈值可以包括一般报警状态对应的加速度阈值即一般报警阈值,和严重报警状态对应的加速度阈值即严重报警阈值,一般报警阈值会低于严重报警阈值;比如设定一般报警阀值为瞬时状态不能超出10m/s2;设定严重报警阈值为20m/s2;当振动传感器2实时检测到的加速度读数为11m/s2时,视为触发一般报警状态,可通过报警指示灯或者监控主机提示一般报警状态并记录当前日志;当振动传感器2实时检测到的加速度读数为22m/s2时,视作触犯严重报警状态,通过报警等或监控主机提示严重报警状态并记录当前日志;该实施方式中,将触发严重报警状态视作振动传感器超限,该状态下光学经纬仪的辅助紧固零件可能存在松动,应该进行停车检查。
54.振动传感器2对应设定的加速度阈值,即初始阈值,具体可以通过综合预先路面试
验得到;例如:同类型设备主机,如果在路面测试中出现20m/s2以上的峰值,经运输后精度校验出现精度损失,那我们视20m/s2为严重报警状态;在运输其他不同的精密光学设备时,则可相应设定不同的一般报警阈值和严重报警阈值。本发明优选的实施方式中,取一般报警状态对应的加速度阈值为严重报警状态对应的加速度阈值相对应输入功率的二分之一;一方面可以避免因阈值过低而导致一般报警状态及其容易触发,进而使得该功能失效;另一方面也可以防止因阈值过高,而因振动积累,导致设备因长时间小幅度振动发生精度损失。
55.具体实施方式中,以运输车载光学经纬仪为例,拉力传感器3输出单位为牛顿(n);由于光学经纬仪设备重心较高,通常需要利用四个防翻缆绳4进行运输状态下的固定;拉力传感器3设置于每个防翻缆绳4的中间位置,用于检测防翻缆绳4的实时受力状态。
56.判断拉力传感器的拉力量值是否一致,拉力量值不一致主是指和初始状态差异值不一致,即拉力传感器3的实时拉力均值与初始拉力均值相差在设定范围之内,则判断拉力传感器的拉力量值是一致,正常运输;若拉力传感器3的实时拉力均值与初始拉力均值相差在设定范围之外,则判断拉力传感器的拉力量值不一致,需停车检查。例如:在运输车载光学经纬仪之前,初始的四个拉力传感器3的读数分别为200n,205n,198n,211n,其均值为203.5n,设定20%的变动范围为正常,则当拉力传感器3输出的均值读数在[203.5
±
40.7]n之间变化时,判断为正常运输状态,当四个拉力传感器中的任何一个拉力传感器3的瞬时读数超出该区域,比如读数为100n或者400n时,则判断拉力量值不一致,该状态可能因其中一个防翻缆绳4松动导致,此时触发报警,需要停车检查状态。
[0057]
优选的实施方式中,速度传感器用于记录日志使用,其输出为当前车速,当触发振动传感器超限或者拉力传感器的拉力量值不一致状态报警时,则当前车速以及振动记录值和视频监控信号一并进行记录;具体的,传感器模组中各传感器和监控主机通过ieee802.15.4/zigbee方案进行信号通讯。
[0058]
具体实施方式中,在整个运输过程中,根据振动传感器2对应设置的一般报警阈值和严重报警阈值,车载精密光学设备振动防翻监控系统可以相应设置两种报警模式,即轻微振动预警和严重振动报警;当振动传感器2实时检测到的加速度值达到一般报警阈值时,对应于轻微振动预警,此时系统可不进行记录;而当振动传感器2实时检测到的加速度值达到严重报警阈值时,对应于严重振动报警,此时系统需要记录相关数据。优选的,在未达到严重振动报警情况下,振动防翻监控系统可以以1hz的频率抽样方式记录数据,振动传感器2则始终以200hz的频率进行数据采集。在达到严重振动报警情况时,和/或达到拉力传感器的报警情况时,振动防翻监控系统可以记录报警点前后5秒对应的各方面的记录数据,具体包括振动传感器2的记录,拉力传感器3的记录,速度传感器对当前车速的记录,视频信号采集装置对整个精密光学设备1实时状态画面的记录等等,通过文件名给出当前时间节点信息,后续通过分析这些记录数据对应的状态日志,可以用于转场核验设备运输过程中的振动和受力情况,如果出现设备精度受损等情况,则可以通过日志查看原因,为后续运输提供更为优化的参考方案。
[0059]
本发明所提供的车载精密光学设备振动防翻监控系统,通过将振动、拉力和视频监控集成的方案,实现了运输状态下,精密光学设备健康监控的功能。通过振动传感器检测当前设备运输工装刚度情况,若发生因路面情况导致的设备松动以及防翻功能失效,则通
过监控主机提醒驾驶人员;通过拉力传感器检测当前设备运输过程中,防翻缆绳的拉力状态,确认设备是否处于平衡稳定的状态;同时,进一步通过视频监控,保证运输人员在不停车状态下,能够实时了解运输过程中的设备状态,方便快捷的实现对精密光学设备的转场运输,显著减少运输过程中人工下车操作的环节。
[0060]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0061]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
[0062]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。