1.本发明涉及机器人的技术领域,具体地,涉及一种吸盘履带式爬壁机器人。
背景技术:
2.随着科学的飞速发展,机器人已经成为人类社会生活中不可或缺的一部分。由于人类安全意识的增强,许多高空作业都希望利用机器人来进行工作,爬壁机器人可以将人类从危险的作业环境中解放出来,提高工作效率,继而降低作业成本,而且机器人在攀爬救援等领域有着广泛的应用前景。
3.现有的磁吸附是利用永磁铁嵌入到履带上,永磁铁按照固定方式排列。而该种磁吸附的方式只能在可吸附的墙体上移动,对于现阶段多种材料的外墙来说,现有的吸附机器人已经无法满足用户的需要。
技术实现要素:
4.本发明的目的是提供一种吸盘履带式爬壁机器人,该吸盘履带式爬壁机器人可以吸附的墙体上,且能够在吸附的同时实现移动爬行。
5.为了实现上述目的,本发明提供了一种吸盘履带式爬壁机器人,其特征在于,所述吸盘履带式爬壁机器人包括:
6.承载架、安装于所述承载架上的负压提供机构、安装于所述负压提供机构上的驱动轮结构、套接于所述驱动轮结构的外侧的履带、安装于所述履带上的吸盘组件以及配置于所述负压提供机构与所述吸盘组件之间的且处于所述履带从直线转换至弧形移动的一位置上的阻断块;其中,
7.所述负压提供机构能够在所述吸盘组件处于所述履带直线移动对应的位置时连通于所述吸盘组件以提供负压,使得所述吸盘组件能够负压吸附于墙壁上,所述阻断块能够阻断所述负压提供机构给所述吸盘组件提供负压。
8.优选地,所述履带上配置有带齿轮;
9.所述驱动轮结构包括:啮合于所述带齿轮且能够自由转动的齿轮、固定所述齿轮的相对位置的固定组件和驱动所述齿轮转动的驱动组件;其中,所述齿轮能够驱动所述履带移动。
10.优选地,所述固定组件包括:盖合于所述齿轮端面上的固定盘和贯穿所述固定件以固定所述固定件与所述齿轮的螺栓;
11.所述驱动组件包括:安装于所述负压提供机构上的驱动轴和同轴连接于所述驱动轴的固定件;其中所述固定件能够贯穿所述固定盘和所述齿轮,且能够在所述驱动轴的驱动下联动所述齿轮转动。
12.优选地,所述吸盘组件包括:贯穿所述履带的吸盘组和用于安装所述吸盘组且能够与所述履带同步移动的滑动链条;其中,所述吸盘组和滑动链条能够连通于所述负压提供机构,使得所述吸盘组能够接收所述负压提供机构提供的负压完成与所述墙壁的吸附,
所述吸盘组在所述链条的带动下与所述履带同步移动。
13.优选地,所述滑动链条与所述负压提供机构之间配置有密封的第一橡胶垫圈。
14.优选地,所述吸盘组与所述滑动链条之间配置有密封的第二橡胶垫圈。
15.优选地,所述负压提供机构包括:与所述吸盘组相连通的负压腔和给所述负压腔提供负压的真空泵。
16.优选地,所述承载架上配置有能够安装机械臂的转动安装圈。
17.优选地,所述阻断块固定于所述真空泵上,且能够与所述滑动链条相配合止挡所述负压腔与所述吸盘组的连通。
18.根据上述技术方案,本发明设计了负压提供机构、滑动链条和阻断块等组成,滑动链条与履带可以同步转动,保证了吸盘组件可以随上述两者移动,该装置由负压提供机构提供负压后,经负压提供机构传递给吸盘组件,使得吸盘组件能够吸附在墙壁上,在移动的过程中,利用阻断块止挡传递给吸盘组件的吸附力,方便其连续的吸附和隔断,实现其连续的爬壁移动。
19.本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
20.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
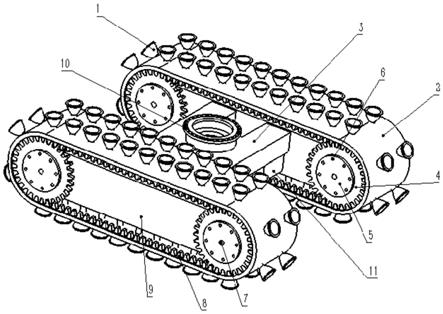
21.图1是说明本发明的一种吸盘履带式爬壁机器人的结构示意图;
22.图2是说明本发明的一种吸盘组件的结构示意图;
23.图3是说明本发明的一种吸盘履带式爬壁机器人的俯视的结构示意图;
24.图4是说明本发明的一种吸盘履带式爬壁机器人的侧视图;以及
25.图5是说明本发明的一种吸盘履带式爬壁机器人的正视图。
26.附图标记说明
27.1、吸盘组;2、履带;3、承载架;4、齿轮;5、固定盘;6、螺栓;7、固定件;8、带齿轮;9、负压腔;10、转动圈;11、真空泵;12、滑动链条;13、阻断块;14、第一橡胶垫圈;15、滚动轴承;16、驱动轴;17、第二橡胶垫圈。
具体实施方式
28.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
29.在本发明中,在未作相反说明的情况下,“上下左右”等包含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技术人员理解的俗称,而不应视为对该术语的限制。
30.图1是本发明的一种吸盘履带2式爬壁机器人的结构示意图,如图1所示,所述吸盘履带2式爬壁机器人包括:承载架3、安装于所述承载架3上的负压提供机构、安装于所述负压提供机构上的驱动轮结构、套接于所述驱动轮结构的外侧的履带2、安装于所述履带2上的吸盘组件以及配置于所述负压提供机构与所述吸盘组件之间的且处于所述履带2从直线转换至弧形移动的一位置上的阻断块13;其中,所述负压提供机构能够在所述吸盘组件处
于所述履带2直线移动对应的位置时连通于所述吸盘组件以提供负压,使得所述吸盘组件能够负压吸附于墙壁上,所述阻断块13能够阻断所述负压提供机构给所述吸盘组件提供负压。其中,所述承载架3是一个横向设置的结构,其能够与负压提供机构相固定连接,其主要通过驱动轮结构实现履带2的驱动转动,另外,吸盘组件的结构可以实现与墙壁的吸附,以给所述吸盘组件提供负压,使得所述吸盘组件能够吸附在墙壁上,另外,利用设计的阻断块13可以阻断所述负压提供机构给所述吸盘提供负压,使得所述吸盘能够在与墙壁吸附的同时,在转变位置时利用阻断块13实现吸盘组件的阻断,使得负压无法提供,继而可以使得吸盘没有负压,继而可以远离所述墙壁。
31.优选地,所述履带2上配置有带齿轮8;所述驱动轮结构包括:啮合于所述带齿轮8且能够自由转动的齿轮4、固定所述齿轮4的相对位置的固定组件和驱动所述齿轮4转动的驱动组件;其中,所述齿轮4能够驱动所述履带2移动。其中,所述履带2可以与齿轮4同步移动,其可以实现上方的吸盘组件的驱动,此外,驱动组件可以实现齿轮4转动的驱动,提供齿轮4转动的动力。
32.优选地,所述固定组件可以包括:盖合于所述齿轮4端面上的固定盘5和贯穿所述固定件7以固定所述固定件7与所述齿轮4的螺栓6;所述驱动组件可以包括:安装于所述负压提供机构上的驱动轴16和同轴连接于所述驱动轴16的固定件7;其中所述固定件7能够贯穿所述固定盘5和所述齿轮4,且能够在所述驱动轴16的驱动下联动所述齿轮4转动。其中,所述固定盘5可以实现齿轮4的盖合,其能够在固定件7、螺栓6的作用下实现与齿轮4的固定。
33.优选地,所述吸盘组件可以包括:贯穿所述履带2的吸盘组1和用于安装所述吸盘组1且能够与所述履带2同步移动的滑动链条12;其中,所述吸盘组1和滑动链条12能够连通于所述负压提供机构,使得所述吸盘组1能够接收所述负压提供机构提供的负压完成与所述墙壁的吸附,所述吸盘组1在所述链条的带动下与所述履带2同步移动。其中,所述吸盘组1可以吸附在墙壁上,实现与所述墙壁的固定,另外,所述滑动链条12可以实现与链条的同步转动,继而可以实现吸盘组1的移动。
34.优选地,为了实现滑动链条12与所述负压提供机构之间的密封,所述滑动链条12与所述负压提供机构之间配置有密封的第一橡胶垫圈14。
35.优选地,为了实现吸盘组1与所述滑动链条12之间的密封,所述吸盘组1与所述滑动链条12之间配置有密封的第二橡胶垫圈17。
36.优选地,所述负压提供机构可以包括:与所述吸盘组1相连通的负压腔9和给所述负压腔9提供负压的真空泵11。其中,所述负压提供机构可以实现给所述吸盘组1提供负压,使其能够与墙体固定。
37.优选地,为了实现其他部件的安装固定,所述承载架3上配置有能够安装机械臂的转动圈10。
38.优选地,所述阻断块13固定于所述真空泵11上,且能够与所述滑动链条12相配合止挡所述负压腔9与所述吸盘组1的连通。
39.本发明的实施例的使用方式是:本发明包括吸盘组1、履带2、承载架3、齿轮4、固定盘5、螺栓6、固定件7、带齿轮8、负压腔9、转动圈10、真空泵11、滑动链条12、阻断块13、第一橡胶圈、滚动轴承15、驱动轴16、第二橡胶圈。吸盘组1穿过履带2表面的孔固定,下端利用螺
纹固定在滑动链条12上,带齿轮8固定在履带2内表面,滚动轴承15固定在负压腔9的轴孔中,驱动轴16穿过滚动轴承15进行固定,固定盘5通过螺栓6与齿轮4固定,再将固定件7穿过固定盘5和齿轮4与驱动轴16相固定,同时齿轮4与带齿轮8相啮合,承载架3与负压腔9相固定,真空泵11头部固定在负压腔9的进气口,同时泵身与承载架3下表面固定,转动圈10与承载架3上部的圆柱体同轴度配合,上表面重合,滑动链条12的外表面与真空泵11相接合,第一橡胶圈处于两者之间,阻断块13下表面与滑动链条12的内表面相合,底部固定在真空泵11上。本发明利用设计的承载架3、负压提供机构、驱动轮结构等部件可以实现吸盘组件的驱动移动,另外通过设计的阻断块13可以实现吸盘组件的阻断,使其能够阻断最前方的吸盘组件与负压提供机构的贯通,继而可以方便其从墙体上移出,连续的吸附移出使得机器人可在墙体上移动。
40.本发明采用类似气动滑环的装置,有负压腔9、滑动链条12和阻断块13等组成,滑动链条12与履带2可以同步转动,保证了吸盘组1可以跟随两者进行移动;该装置由真空泵11负压后,经负压腔9传递给吸盘,使吸盘吸附在墙壁上;在移动的过程中,吸盘逐个移动,但由于压强一样致使尾部吸盘不易取下,所以内部的阻断块13的作用就是阻断压强传递到吸盘,从而使其易于取下,保证装置正常行驶。本发明的动力设施采用两对齿轮4作用在履带2上,保证驱动力只作用在履带2上,减少了不必要的能量损失。这中涉及结构不仅避免了现有真空吸附管路多且复杂的问题,而且解决了磁吸附的局限问题。
41.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
42.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
43.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。