1.本发明涉及自动驾驶障碍物筛选技术领域,尤其涉及一种自动驾驶辅助过程中障碍物筛选方法及系统。
背景技术:
2.随着智能科技的发展,自动驾驶技术日趋成熟,但在现有的技术中,自动驾驶辅助过程中对障碍物的筛选人存在不足,其通过感知对障碍物进行筛选,其未对障碍物与自身车辆的重叠进行分析,导致障碍物筛选精确度降低,误选障碍物造成非正常的刹车现象,影响车辆驾驶稳定性,因此,为了解决此类问题,我们提出了一种自动驾驶辅助过程中障碍物筛选方法及系统。
技术实现要素:
3.本发明提出的一种自动驾驶辅助过程中障碍物筛选方法及系统,解决了现有的障碍物筛选方法存在的缺少重叠分析,筛选精确度低,易造成非正常的刹车现象,影响车辆驾驶稳定性的问题。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种自动驾驶辅助过程中障碍物筛选方法,包括如下步骤:
6.s1、获取障碍物信息:通过传感器获得障碍物的信息;
7.s2、获取车辆位置:对当前车辆位置进行获取;
8.s3、计算障碍物坐标:以当前车辆位置为原点,对障碍物的坐标进行计算;
9.s4、获取车辆信息:获取当前车辆的行驶信息;
10.s5、计算障碍物重叠风险:基于障碍物坐标和车辆行驶信息进行驾驶模拟,对障碍物与当前车辆的重叠风险进行计算,对障碍物进行筛选。
11.优选的,所述步骤s1中所涉及的获取障碍物信息,其通过摄像头、毫米波雷达的传感器获取障碍物的信息,包括其形状、宽度、深度、高度。
12.优选的,所述步骤s2中所涉及的获取车辆位置,其通过gps对当前车辆定位,获取该车辆的位置信息。
13.优选的,所述步骤s3中所涉及的计算障碍物坐标,其确认其障碍物目标所在处对应的车道线横向坐标和纵向坐标,以当前车辆的位置为原点,通过gps对障碍物的坐标进行定位计算。
14.优选的,所述步骤s4中所涉及的获取车辆信息,其通过当前车辆的车长obs_length、车宽obs_width、车高obs_high、纵向相对距离obs_dx、横向相对距离obs_dy、纵向相对速度obs_dxv、横向相对速度obs_dyv、障碍物与自车道车道线三次多项式方程计算出目标的四个角点坐标,分别为left_rear(lr_point_x,lr_point_y),left_frond(lf_point_x,lf_point_y),right_rear(rr_point_x,rr_point_y),right_frond(rf_point_x,rf_point_y);
15.其取lr_point_y、lf_point_y、rr_point_y、rf_point_y的最大值max_dy和最小值min_dy,表示目标横向跨度,取lr_point_x、lf_point_x、rr_point_x、rf_point_x的最大值max_dx和最小值min_dx,表示目标纵向跨度。
16.优选的,所述步骤s4中所涉及的获取车辆信息,其通过最大值max_dy和最小值min_dy分别计算出对应到自车道左、右侧车道线上的横向坐标:max_dy_left、max_dy_right、min_dy_left、min_dy_right;通过max_dy和最小值min_dy与max_dy_left、max_dy_right、min_dy_left、min_dy_right的差值计算目标障碍物跨入自车道部分的比例ratio。
17.优选的,所述步骤s5中所涉及的计算障碍物重叠风险,若横向相对距离obs_dy》0,表示目标障碍物处于自车的右侧;若横向相对距离obs_dy《0,表示目标障碍物处于自车左侧。
18.优选的,所述步骤s5中所涉及的计算障碍物重叠风险,当横向相对距离obs_dy》0时:
19.max_dy-max_dy_right《0,表示目标障碍物处于自车道内,ratio=1;
20.min_dy-min_dy_right》0,表示目标障碍物处于自车道外,ratio=0;
21.否则,表示目标跨右侧车道线,则
[0022][0023]
当横向相对距离obs_dy《0时:
[0024]
min_dy-min_dy_left》0,表示目标障碍物处于车道内,ratio=1;
[0025]
max_dy-max_dy_left《0,表示目标障碍物处于车道外,ratio=1;
[0026]
否则,表示目标障碍物跨左侧车道线,则
[0027][0028]
优选的,所述步骤s5中所涉及的计算障碍物重叠风险,其当前车辆到左侧车道线距离为c0_l、自车到右侧车道线距离为c0_r,计算目标障碍物与当前车辆是否有重叠风险,若|c0_l|》|c0_r|,表示为当前车辆在本车道内靠右侧行驶,此时计算出当前车辆与目标障碍物是否存在重叠,若存在重叠部分,则目标障碍物需要被筛选为感兴趣目标,若不存在重叠部分,则目标障碍物需要被筛选为非感兴趣目标。
[0029]
一种自动驾驶辅助过程中障碍物筛选系统,包括:
[0030]
障碍物获取模块,其与自车信息获取模块和车辆自动调整模块连接,用于获取障碍物的信息,以及获取车辆自动调整后的范围内障碍物信息,并将障碍物信息传送至自车信息获取模块;
[0031]
自车信息获取模块,其与障碍物获取模块和障碍物位置计算模块连接,用于获取车辆的信息,并将障碍物信息和车辆信息传送至障碍物位置计算模块;
[0032]
障碍物位置计算模块,其与自车信息获取模块和自车行驶模拟模块连接,用于接收障碍物信息和车辆信息,基于车辆信息对障碍物的坐标位置进行计算,并将坐标位置传送至障碍物风险预测模块;
[0033]
自车行驶模拟模块,其与障碍物位置计算模块和障碍物风险预测模块连接,基于车辆行驶信息与障碍物坐标位置,对车辆的行驶进行模拟;
[0034]
障碍物风险预测模块,其与自车行驶模拟模块和障碍物躲避模块连接,当自车行驶模拟模块模拟中自车与障碍物无重叠产生,则表示障碍物无风险,若产生重叠时,则表示障碍物存在风险,此时将风险传输至障碍物躲避模块;
[0035]
障碍物躲避模块,其与障碍物风险预测模块和车辆自动调整模块连接,接收障碍物风险,根据其风险预警对车辆行驶进行重新规划,对障碍物进行避让,并将避让命令传输至车辆自动调整模块;
[0036]
车辆自动调整模块,其与障碍物躲避模块和障碍物获取模块连接,用于接收避让命令,对车辆的行驶进行调整,并将调整后的信息传输至障碍物获取模块,对障碍物进行循环筛选。
[0037]
本发明的有益效果为:通过对障碍物的具体信息和坐标进行获取和计算,结合车辆的位置信息和行驶信息,对车辆行驶进行预测,感知行驶轨迹内的障碍物,计算出车辆的行驶轨迹是否与障碍物存在重叠,若存在重叠部分,将轨迹内与车辆产生重叠的障碍物进行筛选标记,标记为感兴趣目标,从而做出警示和避让,提高行车的安全性。
[0038]
综上所述,该障碍物筛选方法及系统,其基于障碍物和车辆信息进行行驶预测,计算障碍物与行车轨迹的重叠,提高障碍物筛选的精确度,提升行车安全。
附图说明
[0039]
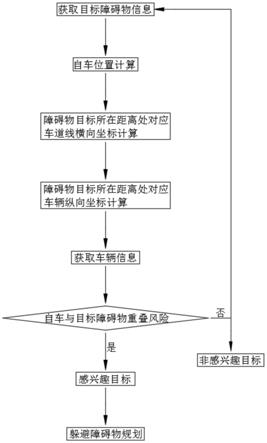
图1为本发明所述的自动驾驶辅助过程中障碍物筛选方法的流程图。
[0040]
图2为本发明所述的自动驾驶辅助过程中障碍物筛选系统的原理图。
具体实施方式
[0041]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0042]
实施例1
[0043]
参照图2,一种自动驾驶辅助过程中障碍物筛选系统,包括:
[0044]
障碍物获取模块,其与自车信息获取模块和车辆自动调整模块连接,用于获取障碍物的信息,以及获取车辆自动调整后的范围内障碍物信息,并将障碍物信息传送至自车信息获取模块;
[0045]
自车信息获取模块,其与障碍物获取模块和障碍物位置计算模块连接,用于获取车辆的信息,并将障碍物信息和车辆信息传送至障碍物位置计算模块;
[0046]
障碍物位置计算模块,其与自车信息获取模块和自车行驶模拟模块连接,用于接收障碍物信息和车辆信息,基于车辆信息对障碍物的坐标位置进行计算,并将坐标位置传送至障碍物风险预测模块;
[0047]
自车行驶模拟模块,其与障碍物位置计算模块和障碍物风险预测模块连接,基于车辆行驶信息与障碍物坐标位置,对车辆的行驶进行模拟;
[0048]
障碍物风险预测模块,其与自车行驶模拟模块和障碍物躲避模块连接,当自车行驶模拟模块模拟中自车与障碍物无重叠产生,则表示障碍物无风险,若产生重叠时,则表示障碍物存在风险,此时将风险传输至障碍物躲避模块;
[0049]
障碍物躲避模块,其与障碍物风险预测模块和车辆自动调整模块连接,接收障碍
物风险,根据其风险预警对车辆行驶进行重新规划,对障碍物进行避让,并将避让命令传输至车辆自动调整模块;
[0050]
车辆自动调整模块,其与障碍物躲避模块和障碍物获取模块连接,用于接收避让命令,对车辆的行驶进行调整,并将调整后的信息传输至障碍物获取模块,对障碍物进行循环筛选。
[0051]
实施例2
[0052]
参照图1,一种自动驾驶辅助过程中障碍物筛选方法,包括如下步骤:
[0053]
s1、获取障碍物信息:通过传感器获得障碍物的信息;
[0054]
s2、获取车辆位置:对当前车辆位置进行获取;
[0055]
s3、计算障碍物坐标:以当前车辆位置为原点,对障碍物的坐标进行计算;
[0056]
s4、获取车辆信息:获取当前车辆的行驶信息;
[0057]
s5、计算障碍物重叠风险:基于障碍物坐标和车辆行驶信息进行驾驶模拟,对障碍物与当前车辆的重叠风险进行计算,对障碍物进行筛选。
[0058]
所述步骤s1中所涉及的获取障碍物信息,其通过摄像头、毫米波雷达的传感器获取障碍物的信息,包括其形状、宽度、深度、高度。
[0059]
所述步骤s2中所涉及的获取车辆位置,其通过gps对当前车辆定位,获取该车辆的位置信息。
[0060]
所述步骤s3中所涉及的计算障碍物坐标,其确认其障碍物目标所在处对应的车道线横向坐标和纵向坐标,以当前车辆的位置为原点,通过gps对障碍物的坐标进行定位计算。
[0061]
所述步骤s4中所涉及的获取车辆信息,其通过当前车辆的车长obs_length、车宽obs_width、车高obs_high、纵向相对距离obs_dx、横向相对距离obs_dy、纵向相对速度obs_dxv、横向相对速度obs_dyv、障碍物与自车道车道线三次多项式方程计算出目标的四个角点坐标,分别为left_rear(lr_point_x,lr_point_y),left_frond(lf_point_x,lf_point_y),right_rear(rr_point_x,rr_point_y),right_frond(rf_point_x,rf_point_y);
[0062]
其取lr_point_y、lf_point_y、rr_point_y、rf_point_y的最大值max_dy和最小值min_dy,表示目标横向跨度,取lr_point_x、lf_point_x、rr_point_x、rf_point_x的最大值max_dx和最小值min_dx,表示目标纵向跨度;
[0063]
其通过最大值max_dy和最小值min_dy分别计算出对应到自车道左、右侧车道线上的横向坐标:max_dy_left、max_dy_right、min_dy_left、min_dy_right;通过max_dy和最小值min_dy与max_dy_left、max_dy_right、min_dy_left、min_dy_right的差值计算目标障碍物跨入自车道部分的比例ratio。
[0064]
所述步骤s5中所涉及的计算障碍物重叠风险,若横向相对距离obs_dy》0,表示目标障碍物处于自车的右侧;若横向相对距离obs_dy《0,表示目标障碍物处于自车左侧;
[0065]
当横向相对距离obs_dy》0时:
[0066]
max_dy-max_dy_right《0,表示目标障碍物处于自车道内,ratio=1;
[0067]
min_dy-min_dy_right》0,表示目标障碍物处于自车道外,ratio=0;
[0068]
否则,表示目标跨右侧车道线,则
[0069][0070]
当横向相对距离obs_dy《0时:
[0071]
min_dy-min_dy_left》0,表示目标障碍物处于车道内,ratio=1;
[0072]
max_dy-max_dy_left《0,表示目标障碍物处于车道外,ratio=1;
[0073]
否则,表示目标障碍物跨左侧车道线,则
[0074][0075]
所述步骤s5中所涉及的计算障碍物重叠风险,其当前车辆到左侧车道线距离为c0_l、自车到右侧车道线距离为c0_r,计算目标障碍物与当前车辆是否有重叠风险,若|c0_l|》|c0_r|,表示为当前车辆在本车道内靠右侧行驶,此时计算出当前车辆与目标障碍物是否存在重叠,若存在重叠部分,则目标障碍物需要被筛选为感兴趣目标,若不存在重叠部分,则目标障碍物需要被筛选为非感兴趣目标。
[0076]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。