1.本实用新型涉及移动机器人转向技术领域,特别涉及一种全向移动机器人转向的切换装置。
背景技术:
2.移动机器人目前被广泛应用于工业、医疗、农业、服务等领域。移动机器人普遍采用二轮转向机构,这种转向机构技术成熟、结构简单,对于较为宽敞的工作场合适应性较好。
3.四轮转向也是一种主要的移动机器人转向方式。这种转向方式能使移动机器人在保持车体姿态不变的情况下,实现前进后退、左右横移、斜向行进,甚至可以完成零半径回转,极大地提高了移动机器人的机动性。
4.目前移动机器人一般只采用两轮转向或者四轮转向中的一种转向方式。但两种转向方式各有不足之处:两轮转向方式需要较大的转弯半径,不适合在狭小空间内作业;而四轮转向方式在需要改变车体姿态时,往往需要先停车,再零半径回转,效率较低。
5.为满足移动机器人在不同工作场景下的需求,充分发挥两轮转向方式和四轮转向方式的优势,本实用新型提出了一种全向移动机器人转向的切换装置,既保留了传统移动机器人两轮转向方式,又可以方便地切换到四轮转向方式。
技术实现要素:
6.为实现上述目的,本实用新型采用的技术方案为:
7.一种全向移动机器人转向的切换装置,主要由驱动模块、执行模块和同步模块组成。
8.优选的,所述驱动模块包括切换装置电机15,切换装置电机主动齿轮16,切换装置被动齿轮17,切换装置丝杆14,切换装置拔叉13,切换装置螺母12。所述切换装置电机15与所述切换装置电机主动齿轮16同轴转动,所述切换装置电机主动齿轮16与所述切换装置被动齿轮17啮合转动,所述切换装置被动齿轮17与所述切换装置丝杆14同轴转动,所述切换装置螺母12与所述切换装置丝杆14上的传动螺纹配合传动。
9.优选的,所述切换装置螺母12与切换装置拔叉13通过螺钉固定,方便拆卸。
10.优选的,所述切换装置拨叉13为了方便安装,加工成分体式的两部分,由螺栓和螺钉联接。
11.优选的,所述执行模块由切换装置滑块3,四轮转向机构传动销4,四轮转向机构传动销配合盘5,转向电机22,转向电机主动齿轮20和转向电机被动齿轮21组成。
12.优选的,所述切换装置滑块3内侧加工有花键槽,与所述立轴花键11相啮合,所述切换装置滑块3跟随切换装置拔叉13,沿着所述立轴花键11上下移动。
13.优选的,所述四轮转向机构传动销4位于所述切换装置滑块3下部。
14.优选的,当所述切换装置滑块3向下滑动时,所述四轮转向机构传动销4插入所述
四轮转向机构传动销配合盘5的插孔中,所述四轮转向机构传动销配合盘5与所述立轴同轴,通过轴承嵌套在所述立轴上,只有当传动销插入配合盘时,转向电机22的动力才通过主动齿轮20、转向电机被动齿轮21、立轴花键11、传动销、配合盘、带轮,最终传给四轮转向前立轴传动带6。而传动带再将动力传给其它四根立轴,实现四轮转向。
15.优选的,四轮转向机构传动销4和四轮转向机构传动销配合盘5相对角度位置关系,需要由光电对射传感器检测到对齐复位状态后,切换装置才开始执行切换动作。
16.优选的,所述转向电机22为转向提供动力,所述转向电机22与所述转向电机主动齿轮20同轴,所述转向电机主动齿轮20与所述转向电机被动齿轮21啮合,所述转向电机被动齿轮21与所述立轴同轴且周向固定。所述四轮转向传动销配合盘5与立轴同轴,两者之间装配有轴承。
17.优选的,所述同步模块包括四轮转向前立轴传动带6,四轮转向左传动同步带18(a),四轮转向右传动同步带18(b)组成。
18.优选的,所述四轮转向前立轴传动带6与所述四轮转向传动销配合盘5固连的带轮相啮合,所述四轮转向左传动同步带18(a)和四轮转向右传动同步带18(b)与所述四轮转向传动销配合盘5固连的带轮相啮合。
附图说明
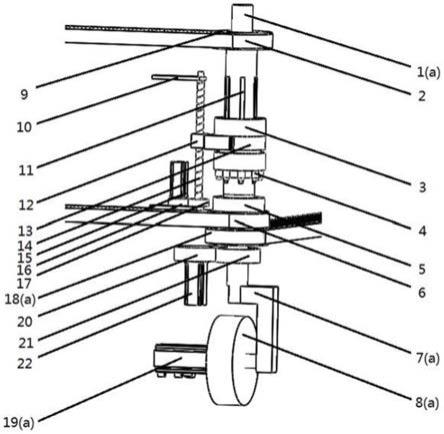
19.图1是本实用新型提出的一种全向移动机器人转向的切换装置总体结构示意图。
20.图2和图3是本实用新型提出的一种全向移动机器人转向的切换装置中的切换装置结构示意图。
21.图中:左前轮立轴1(a),右前轮立轴1(b),左后轮立轴1(c),右后轮立轴1(d),两轮转向机构传动同步带2,切换装置滑块3,四轮转向机构传动销4,四轮转向机构传动销配合盘5,四轮转向机构前立轴传动带6,左前轮支撑7(a),右前轮支撑7(b),左后轮支撑7(c),左后轮支撑7(d),左前轮8(a),右前轮8(b),左后轮8(c),右后轮8(d),两轮转向机构同步带轮9,切换装置丝杆支撑10,立轴花键11,切换装置螺母12,切换装置拔叉13,切换装置丝杆14,切换装置电机15,切换装置电机主动齿轮16,切换装置电机被动齿轮17,四轮转向机构左传动同步带18(a),四轮转向机构右传动同步带18(b),左前驱动电机19(a),右前驱动电机19(b),左后驱动电机19(c),右后驱动电机19(d),转向电机的主动齿轮20,转向电机的被动齿轮21,转向电机22,左后同步带轮23,右后同步带轮24。
具体实施方式
22.为使本实用新型的目的、特征和优点更为明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。
23.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示方位或者位置关系为基于附图所示的方位或者位置关系,仅是为了便于本实用新型和简化描述,而不是指示或者暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本实用新型的限制。
24.一种全向移动机器人转向的切换装置,按照以下步骤实现转向方式的切换:
25.步骤1:四轮转向机构传动销4与四轮转向传动销配合盘5未啮合时,全向移动机器人处于两轮转向状态。
26.步骤2:全向移动机器人通过转向切换装置,切换转向方式。
27.所述步骤2:所述转向切换装置通过以下几个动作,实现转向机构的切换。
28.所述步骤2:第一步,切换装置电机15开始运行,依次带动切换装置电机主动齿轮16、切换装置电机被动齿轮17和切换装置丝杆14转动。
29.所述步骤2:第二步,切换装置丝杆14带动切换装置螺母12上下移动,切换装置螺母12与切换装置拔叉13固定。
30.所述步骤2:第三步,切换装置拔叉13带动切换装置滑块3沿着立轴上下滑动,立轴上设有立轴花键11,切换装置滑块上有四轮转向机构传动销4。
31.所述步骤2:第四步,切换装置拔叉带动滑块向下滑动,四轮转向机构传动销4与四轮转向传动销配合盘5中的插孔啮合,所述四轮转向传动销配合盘5中设有光电对射传感器,确保两者完全啮合。
32.步骤3:转向电机22开始工作,依次带动转向电机主动齿轮20和转向电机被动齿轮21转动。
33.步骤4:转向电机被动齿轮带动四轮转向前立轴传送带6转动,同时所述传送带带动四轮转向左传动同步带18(a)、四轮转向右传动同步带18(b)转动。
34.步骤5:四轮转向左、右同步带18转动带动各立轴1和车轮8转向,完成转向机构的切换。
35.步骤6:驱动电机19工作,带动车轮8转动。
36.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案以及实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。