1.本公开涉及一种转向控制装置以及包括该转向控制装置的转向辅助系统。
背景技术:
2.车辆的转向辅助系统是一种根据驾驶员的意图辅助改变车辆的行驶方向的系统,以及一种通过在期望的驾驶方向上产生转向辅助来辅助驾驶员更容易地操作车辆的系统。
3.该转向辅助系统由液压动力辅助转向系统(hps)和电子动力辅助转向系统(eps)来实现。
4.在近来的转向辅助系统中,在包括在系统中的特定配置发生故障的情况下,应用了具有与特定配置相同的配置的冗余系统。此外,基于这样的冗余系统实现了故障安全功能,并且正在开发用于更稳定地实现故障安全的技术。
技术实现要素:
5.技术问题
6.在此背景下,本公开的目的在于提供一种转向控制装置以及包括该转向控制装置的转向辅助系统,即使通信总线发生故障,该转向控制装置以及该转向辅助系统也能通过另一通信路径连续控制输出侧转向控制装置来执行稳定的控制而不会出现暂时的性能下降。
7.此外,本公开的目的在于提供一种转向控制装置以及包括该转向控制装置的转向辅助系统,即使通信总线发生故障,该转向控制装置以及该转向辅助系统也能够通过连续提供转向辅助动力而不会中断控制来使驾驶员的驾驶感受的差异最小化。
8.此外,本公开的目的在于提供一种转向控制装置以及包括该转向控制装置的转向辅助系统,该转向控制装置以及该转向辅助系统能够通过有效地部署通信总线并实现高度集成来减轻车辆的重量并降低制造成本。
9.技术方案
10.为了解决上述问题,在一个方面,本公开提供一种用于控制与输入侧致动器机械分离的输出侧致动器的转向控制装置,输入侧转向控制装置包括:第一控制器,通过至少一个第一通信总线连接到输出侧转向控制装置;以及输入侧转向控制装置,其包括第二控制器,该第二控制器通过至少一个第二通信总线连接到输出侧转向控制装置并通过至少一个第三通信总线连接到第一控制器;其中第一控制器和第二控制器中的至少一个:确定连接到输出侧转向控制装置的至少一个通信总线是否发生故障,基于确定结果通过处于正常状态的通信总线将控制信号输出到输出侧转向控制装置,如果该至少一个第一通信总线发生故障,则通过根据第三通信总线和第二通信总线的通信路径将控制信号输出到输出侧转向控制装置。
11.在另一方面,本公开提供一种用于控制与输入侧致动器机械分离的输出侧致动器转向控制装置,输入侧转向控制装置包括:第一控制器,通过第一通信总线连接到输出侧转
向控制装置和第二控制器;以及输入侧转向控制装置,其包括第二控制器,该第二控制器通过第二通信总线连接到输出侧转向控制装置和第一控制器;其中第一控制器和第二控制器中的至少一个:确定第一通信总线和第二通信总线中的任何一个是否发生故障,并基于确定结果通过处于正常状态的通信总线将控制信号输出到输出侧转向控制装置。
12.在另一方面,本公开提供一种转向辅助系统,包括:输入侧转向控制装置,用于控制输入侧致动器;输出侧转向控制装置,用于控制输出侧致动器;以及至少一个公共通信总线,用于连接输入侧致动器、输出侧致动器、输入侧转向控制装置和输出侧转向控制装置;其中该输入侧转向控制装置包括:第一控制器,通过公共通信总线连接到输出侧转向控制装置并通过第一通信总线连接到第二控制器;以及第二控制器,通过第一通信总线连接到第一控制器并通过公共通信总线连接到输出侧转向控制装置。
13.有益效果
14.根据本公开的实施例,可以提供一种转向控制装置以及转向辅助系统,即使在通信总线发生故障的情况下,该转向控制装置和转向辅助系统也能够通过另一通信路径连续地控制输出侧转向控制装置来执行稳定的控制而不会出现暂时的性能下降。
15.此外,根据本公开的实施例,可以提供一种转向控制装置以及转向辅助系统,即使在通信总线发生故障的情况下,该转向控制装置和转向辅助系统也能够通过连续地提供转向辅助动力而不中断控制来使驾驶员的驾驶感受的差异最小化。
16.此外,根据本公开的实施例,可以提供一种转向控制装置以及转向辅助系统,该转向控制装置和转向辅助系统能够通过有效地部署通信总线并实现高度集成来减轻车辆的重量并降低制造成本。
附图说明
17.图1是示意性地示出根据本公开的转向辅助系统的示图。
18.图2是示出根据本公开的转向辅助系统的框图。
19.图3是示出根据本公开的转向控制装置和公共通信总线的框图。
20.图4是示出根据本公开的转向控制装置的第一实施例的框图。
21.图5是示出其中根据第一实施例的输入侧转向控制装置输出控制信号的第一实施例的框图。
22.图6是示出其中根据第一实施例的输入侧转向控制装置输出控制信号的第二实施例的框图。
23.图7是示出其中根据第一实施例的输入侧转向控制装置输出控制信号的第三实施例的框图。
24.图8是示出其中根据第一实施例的输入侧转向控制装置输出控制信号的第四实施例的框图。
25.图9是用于说明当包括在根据第一实施例的转向控制装置中的控制器发生故障时所执行的操作的框图。
26.图10是示出根据本公开的转向控制装置的第二实施例的框图。
27.图11是示出其中根据第二实施例的输入侧转向控制装置输出控制信号的实施例的框图。
28.图12是示出根据本公开的输入侧转向控制装置的第三实施例的框图。
29.图13是示出其中根据第三实施例的输入侧转向控制装置输出控制信号的实施例的框图。
30.图14是用于说明当包括在根据第三实施例的转向控制装置的控制器发生故障时所执行的操作的框图。
31.图15是示出根据本公开的转向控制装置的第四实施例的框图。
32.图16是示出其中根据第四实施例的输入侧转向控制装置输出控制信号的实施例的框图。
33.图17是用于说明当包括在根据第四实施例的转向控制装置中的控制器发生故障时的所执行的操作的框图。
34.图18是用于说明输出侧转向控制装置的框图。
35.图19是示出根据本公开的转向控制装置的第五实施例的框图。
具体实施方式
36.在下文中,将参照示例性附图来详细描述本公开的实施例。在本文中可以使用诸如“第一”、“第二”、“a”、“b”、“(a)”或“(b)”的术语来描述本公开的元件。这些术语中的每一个都不是用来定义元件的本质、顺序、次序或数量等,而仅用于将相应的元件与其他元件区区分开。当提及元件“连接到”、“联接到”或“接触”另一元件时,应当解释为,不仅该元件可以直接连接到、直接联接到或直接接触另一元件,而且另外的一个元件也可以插入在该元件和该另一元件之间。
37.图1是示意性地示出根据本公开的转向辅助系统1的图。
38.参照图1,根据本公开的转向辅助系统1是指用于提供辅助转向力以便驾驶员能够容易地转向的系统。
39.转向辅助系统1可以包括通过致动泵来产生液压以提供转向辅助动力的液压动力转向(hps)系统以及驱动电机以提供转向辅助动力的电动动力转向(eps)系统等。在下文中,为方便起见,将参照电动转向辅助系统1来描述本公开,但本公开不限于此。
40.另一方面,根据输入侧致动器10和输出侧致动器20是否通过机械连接构件联接,转向辅助系统1可以分为机械转向辅助系统、线控转向(sbw)系统等。
41.机械转向辅助系统1可以指其中输入侧致动器10和输出侧致动器20通过机械连接构件机械地连接的转向辅助系统1。根据该机械转向辅助系统1,通过由驾驶员旋转方向盘11而产生的旋转力(扭矩)通过机械动力传输装置或机械连接构件(例如,连杆、转向轴、万向节等)传递到输出侧致动器20,从而可以使车轮23转向。
42.另一方面,sbw系统可以指其中输入侧致动器10和输出侧致动器20通过电线、电缆等进行电连接而不是通过机械动力传输装置进行连接的转向辅助系统1。也就是说,sbw系统可以意味着输入侧致动器10和输出侧致动器20在机械上分离。根据sbw系统,输入侧致动器10检测方向盘的转向角度,转向控制装置15计算转向角度的转向控制值(例如,目标齿条行程值),并将指示转向控制值的电信号输出到输出侧致动器20以驱动输出侧致动器20。
43.为方便起见,本公开中的转向辅助系统1被描述为sbw系统,但其不限于此。
44.根据本公开的转向辅助系统1可以包括输入侧致动器10、转向控制装置15以及输
出侧致动器20等。虽然未示出,但在转向辅助系统1为sbw系统的情况下,输入侧致动器10和输出侧致动器20可以通过电线或电缆等电连接部件相互连接。
45.输入侧致动器10可以指转向输入装置,该转向输入装置接收由驾驶员输入的转向信息(例如,方向盘的转向角度),生成与转向信息相对应的检测信号,并将检测信号输出到输出侧致动器20。输入侧致动器10可以包括方向盘11、转向角度传感器12、反作用力电机13和驾驶员扭矩传感器14。
46.转向角度传感器12可以检测由方向盘11的旋转而产生的转向角度。具体地,当驾驶员握住方向盘11并使方向盘11旋转时,转向角度传感器12可以检测方向盘11的旋转角度(转向角度),并将指示检测到的转向角度的检测信号输出到转向控制装置15。
47.反作用力电机13可以从转向控制装置15接收电流命令以将反作用力施加到方向盘11。具体地,反作用力电机13可以从转向控制装置15接收电流命令,并且可以通过以电流命令所指示的旋转速度被驱动来输出反作用扭矩。
48.驾驶员扭矩传感器14可以检测由方向盘11的旋转而产生的驾驶员扭矩。具体地,当驾驶员握住方向盘11并使方向盘11旋转时,驾驶员扭矩传感器14可以检测方向盘11的驾驶员扭矩,并将指示检测到的驾驶员扭矩的检测信号输出到转向控制装置15。这里,驾驶员扭矩可以指由驾驶员对方向盘11的操纵而产生的扭矩。
49.转向控制装置15可以指用于控制转向的装置。具体地,转向控制装置15从转向角度传感器12和驾驶员扭矩传感器14接收指示转向角度和驾驶员扭矩的检测信号,计算转向控制值,并将指示转向控制值的控制信号输出到输出侧致动器20。
50.这里,转向控制值可以指例如目标齿条行程值、目标齿条位置值等,然而,其不限于此。
51.另一方面,转向控制装置15可以接收从输出侧致动器20实际输出的动力信息,计算反作用力控制值,并将指示反作用力控制值的控制信号输出到输入侧致动器10,从而为驾驶员提供转向感受。
52.转向控制装置15可以实现为诸如电子控制器单元(ecu)、微型计算机等的电子控制装置。此外,如图1所示,转向控制装置15可以包括在输入侧致动器10中或者可以作为单独的装置分离开并设置在车辆(未示出)中。
53.下面将进行对转向控制装置15的详细描述。
54.输出侧致动器20可以指根据驾驶员的意图驱动实际车辆进行转向的转向输出装置。输出侧致动器20可以包括转向电机21、齿条22、齿条位置传感器24、车轮23、车速传感器35等。
55.转向电机21可以沿轴向方向移动齿条22。具体地,可以通过从转向控制装置15接收指示转向控制值的控制信号来驱动转向电机21,并且转向电机21可以使齿条22沿轴向方向成直线地移动。
56.齿条22可以通过驱动转向电机21来执行直线运动,并且可以通过齿条22的直线运动使车轮23向左或向右转向。
57.齿条位置传感器24可以检测齿条22的位置。具体地,,当齿条22执行直线运动并从当方向盘11处于中立位置时的相应位置移动时,齿条位置传感器24可以检测齿条22的实际位置并将指示齿条22的位置检测值的检测信号输出到转向控制装置15。
58.这里,齿条位置传感器24可以检测齿条22的实际移动速度。也就是说,齿条位置传感器24可以检测齿条22的位置,通过将检测到的齿条22的位置相对于时间进行微分来计算齿条22的移动速度,并将指示齿条22的移动速度值的检测信号输出到转向控制装置15。因此,齿条位置传感器24可以进一步包括微分器(未示出)。
59.尽管未示出,根据本公开的转向辅助系统1可以进一步包括转向柱、小齿轮、用于检测车辆的行驶速度的车速传感器、用于检测车轮23的转向角度的转向角度传感器、用于检测车辆的航向角度的横摆率传感器、以及用于使转向输入部件与转向输出部件分离或使转向输入部件与转向输出部件连接的离合器。
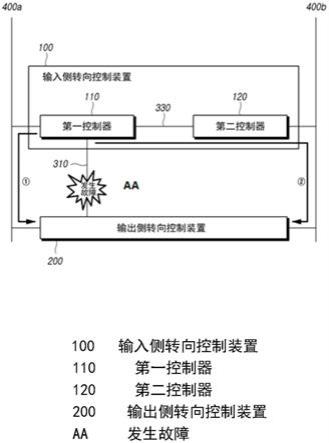
60.图2是示出根据本公开的转向辅助系统1的框图。
61.参照图2,转向辅助系统1可以包括输入侧致动器10、转向控制装置15和输出侧致动器20。此外,转向控制装置10可以包括输入侧转向控制装置100和输出侧转向控制装置200。
62.输入侧转向控制装置100可以控制输入侧致动器10,并且输出侧转向控制装置200可以控制输出侧致动器20。此外,输入侧转向控制装置100和输出侧转向控制装置200可以利用将在后面描述的公共通信总线400或多个通信总线来发送/接收数据,以实现上述转向控制装置15的功能。
63.例如,输入侧转向控制装置100可以接收指示转向角度和驾驶员扭矩的检测信号,计算转向控制值,并将指示转向控制值的控制信号输出到输出侧转向控制装置200,并且输出侧转向控制装置200可以将控制信号输出到输出侧转向控制装置200。这里,输出侧转向控制装置200可以接收控制信号并验证控制信号的有效性。
64.在下文中,将描述输入侧转向控制装置100和输出侧转向控制装置200之间的信号发送/接收关系。
65.图3是示出根据本公开的输入侧转向控制装置100、输出侧转向控制装置200和公共通信总线的框图。
66.参照图3,根据本公开的输入侧转向控制装置100和输出侧转向控制装置200可以通过通信总线300直接连接以发送和接收数据、信号等,或者可以通过公共通信总线400连接以与包括在转向辅助系统1中的部件交换数据或信号。
67.公共通信总线400可以指诸如图1中所示的输入侧致动器10和输出侧转向控制装置200的车辆通信装置,并且包括在转向辅助系统1中的每个部件可以通过公共通信总线400相互交换数据、信号等。
68.该公共通信总线400可以包括用于发送和接收信号的第一状态、例如信号的高状态的总线,以及用于发送和接收第二状态、例如信号的低状态的总线。然而,其不限于此。
69.另一方面,公共通信总线400可以包括在电缆、电线等中,并且可以是在诸如控制器局域网(can)、以太网和flexray的通信装置中使用的总线,然而,其不限于此。
70.此外,输入侧转向控制装置100可以确定通信总线300是否发生故障。例如,如果输入侧转向控制装置100通过通信总线300将测试信号发送到输出侧转向控制装置200,并通过通信总线300从输出侧转向控制装置200接收到反馈信号,则确定通信总线300处于正常状态,如果没有接收到反馈信号,则确定通信总线300发生故障,然而,其不限于此。
71.在下文中,将详细描述根据本公开的转向控制装置15。
72.图4是示出根据本公开的转向控制装置100的第一实施例的框图。
73.参照图4,根据本公开的转向控制装置15可以指上面参照图1至图3描述的转向控制装置15。转向控制装置15可以被实现为包括多个控制器的冗余系统。例如,输入侧转向控制装置100可以包括第一控制器110、第二控制器120等。然而,本公开不限于此,根据本公开的转向控制装置15可以包括三个或更多个控制器。
74.这里,第一控制器110和第二控制器120可以从转向角度传感器和驾驶员扭矩传感器接收关于转向角度和驾驶员扭矩的信息以计算转向控制值,并将控制信号输出到输出侧转向控制装置200以控制包括在输出侧致动器20中的转向电机。
75.例如,第一控制器110接收方向盘的转向信息,计算转向控制值,并生成指示转向控制值的控制信号。
76.第一控制器110和第二控制器120中的每一个可以通过至少一个通信总线连接到输出侧转向控制装置200,并且可以通过通信总线将控制信号传输到输出侧转向控制装置200。
77.例如,第一控制器110通过至少一个第一通信总线310连接到输出侧转向控制装置200。
78.作为另一示例,第二控制器120通过至少一个第二通信总线320连接到输出侧转向控制装置200。
79.另一方面,可以通过至少一个通信总线连接第一控制器110和第二控制器120以执行内部通信。
80.作为示例,通过至少一个第三通信总线330连接第一控制器110和第二控制器120。
81.这里,通信总线可以指用于发送和接收数据、信号等的通信路径。可以存在一个或多个通信总线,多个通信总线可以用于具有相同优先级的通信,多个通信总线中每一个的优先级可以彼此不同。下文中将提供其详细描述。
82.这样的通信总线可以指与上述公共通信总线相同的方式在诸如控制器局域网(can)、以太网和flexray的通信装置中使用的总线,然而,其不限于此。
83.另一方面,第一控制器110和第二控制器120可以如上面参照图3所描述的确定连接到输出侧转向控制装置200的至少一个通信总线是否发生故障。
84.例如,第一控制器110通过第一通信总线310将测试信号发送到输出侧转向控制装置200,并基于是否通过第一通信总线310接收到反馈信号来确定第一通信总线310是否发生故障。在这种情况下,如果第一控制器110接收到反馈信号,则第一控制器确定第一通信总线310处于正常状态,如果第一控制器110没有接收到反馈信号,则第一控制器确定第一通信总线310发生故障。
85.作为另一示例,第二控制器120通过第二通信总线320将测试信号发送到输出侧转向控制装置200,并基于是否通过第二通信总线320接收到反馈信号来确定第二通信总线320是否发生故障。
86.另一方面,第一控制器110和第二控制器120可以基于确定是否发生故障的结果通过处于正常状态的通信总线将控制信号输出到输出侧转向控制装置200。
87.例如,如果第一通信总线310处于正常状态,则第一控制器110可以通过根据第一通信总线310的通信路径
①
将控制信号输出到输出侧转向控制装置200。
88.作为另一示例,如果第一通信总线310处于正常状态,则第一控制器110可以通过根据第三通信总线330和第二通信总线320通信路径
②
将控制信号输出到输出侧转向控制装置200。
89.上述示例可以类似地应用于第二控制器120的情况。也就是说,如果第二通信总线320处于正常状态,则第二控制器120可以通过第二通信总线320输出控制信号,或者可以通过第三通信总线330和第一通信总线320输出控制信号。
90.另一方面,第一控制器110和第二控制器120中的一个可以作为主控制器进行操作,另一个可以作为子(或从)控制器进行操作。在这种情况下,主控制器具有对输出侧转向控制装置200的控制权并将控制信号输出到输出侧转向控制装置200,如果主控制器进行操作,则子控制器不进行操作。
91.例如,在第一控制器110为主控制器并且第二控制器120为子控制器的情况下,第一控制器110生成控制信号并将其输出到输出侧转向控制装置200。当第一控制器110进行操作时,第二控制器120不进行操作,然而,其不限于此。
92.可选地,第一控制器110和第二控制器120都可以作为主(或也称为主要)控制器来进行操作。在这种情况下,第一控制器110和第二控制器120可以各自计算转向控制值,但是可以分别输出从与转向控制值相对应的控制信号划分出的信号。这里,划分出的信号中的每一个可以被整合为控制信号并输出到输出侧转向控制装置200以应用于包括在输出侧致动器20中的转向电机。
93.另一方面,根据本公开的转向控制装置100可以基于冗余系统来执行故障安全功能。例如,第一控制器110和第二控制器120可以通过第三通信总线330传输关于自身状态的信息以监测对方的状态,并且处于正常状态的控制器可以接管处于异常状态的控制器的功能。在下文中将参照图9进行详细描述。
94.在下文中,将描述通过根据通信总线是否发生故障而改变通信路径来输出控制信号的实施例。
95.图5是示出其中根据第一实施例的输入侧转向控制装置100输出控制信号的第一实施例的框图。
96.参照图5,在包括在输入侧转向控制装置100中的特定控制器和输出侧转向控制装置200通过一个通信总线连接的情况下,如果一个通信总线发生故障,则特定控制器可以通过处于正常状态的另一通信总线通过通信路径将控制信号输出到输出侧转向控制装置200。
97.作为示例,在只有一个第一通信总线310且第一通信总线310发生故障的情况下,第一控制器110通过根据第三通信总线330和第二通信总线320的通信路径
②
将控制信号输出到输出侧转向控制装置200。
98.尽管未示出,但上述示例可以类似地应用于第二控制器120。也就是说,如果一个第二通信总线320发生故障,则第二控制器120可以通过根据第三通信总线330和第一通信总线310的通信路径输出控制信号。
99.另一方面,如上所述,第一通信总线310和第二通信总线320可以是多个。在下文中,将详细描述通过根据多个通信总线是否发生故障而改变通信路径来输出控制信号的实施例。
100.图6是示出其中根据第一实施例的输入侧转向控制装置100输出控制信号的第二实施例的框图。
101.参照图6,在包括在根据本公开的转向控制装置100中的特定控制器和输出侧转向控制装置200通过多个通信总线进行连接的情况下,特定控制器可以通过基于处于正常状态的通信总线而形成的两个或更多个通信路径中的任何一个将控制信号输出到输出侧转向控制装置200。
102.例如,如果在多个第一通信总线310中存在一个发生故障的第一通信总线310,则第一控制器110通过处于正常状态的第一通信总线310将控制信号输出到输出侧转向控制装置200。
103.具体参照图6,例如,如果两个第一通信总线310中的任何一个第一通信总线310发生故障,则第一控制器110通过根据处于正常状态的另一通信总线310的通信路径
①
将控制信号输出到输出侧转向控制装置200。然而,本发明不限于此。
104.作为另一示例,如果在多个第一通信总线310中存在发生故障的第一通信总线310,则第一控制器110通过处于正常状态的第三通信总线330和第二通信总线320将控制信号输出到输出侧转向控制装置200。
105.具体参照图5,例如,如果两个第一通信总线310中的任何一个第一通信总线310发生故障,则第一控制器110通过根据处于正常状态的第三通信总线330和第二通信总线320的通信路径
②
将控制信号输出到输出侧转向控制装置200。然而,本发明不限于此。
106.在这种情况下,当第一控制器110通过根据第一通信总线310的通信路径
①
输出控制信号时所需的处理速度和计算复杂度可以比当通过根据第三通信总线330和第二通信总线320的通信路径
②
输出控制信号时所需的处理速度稍快且更简单。
107.尽管未示出,但上述示例可以类似地应用于第二控制器120。也就是说,如果在多个第二通信总线320中存在一个有故障的第二通信总线320,则第二控制器120可以通过处于正常状态的第二通信总线320输出控制信号,或者可以通过第三通信总线330和第一通信总线310输出控制信号。
108.另一方面,连接在控制器和输出侧转向控制装置200之间的多个通信总线可能全部发生故障。下面将详细描述当多个通信总线全部发生故障时输出控制信号的实施例。
109.图7是示出其中根据第一实施例的输入侧转向控制装置100输出控制信号的第三实施例的框图。
110.参照图7,在连接在包括在输入侧转向控制装置100中的特定控制器与输出侧转向控制装置200之间的多个通信总线全部发生故障的情况下,特定控制器可以通过穿过连接在控制器之间的通信总线以及连接在另一个控制器和输出转向控制装置200之间的通信总线的通信路径将控制信号输出到输出侧转向控制装置200。
111.例如,如果多个第一通信总线310全部发生故障,则第一控制器110通过根据第三通信总线330和第二通信总线320的通信路径
②
将控制信号输出到输出侧转向控制装置200。
112.尽管未示出,但上述示例可以类似地应用于第二控制器120。也就是说,如果多个第二通信总线320全部发生故障,则第二控制器120可以通过根据处于正常状态的第三通信总线330和第一通信总线310的通信路径将控制信号输出到输出侧转向控制装置200。
113.另一方面,如上所述,可以将连接在控制器和输出侧转向控制装置200之间的多个通信总线中的每一个的优先级确定为不同。
114.图8是示出其中根据第一实施例的输入侧转向控制装置100输出控制信号的第四实施例的框图。
115.参照图8,连接在特定控制器和输出侧转向控制装置200之间的多个通信总线可以包括主通信总线和子通信总线。在这种情况下,可以存在不止一个子通信总线。然而,本发明不限于此。
116.如图8所示,例如,第一通信总线310为优先使用的第一主通信总线311以及在第一主通信总线311发生故障时而使用的第一子通信总线312。
117.尽管未示出,第二通信总线320还可以包括第二主通信总线和一个或多个第二子通信总线,并且第三通信总线330还可以包括第三主通信总线以及一个或多个第三子通信总线。
118.另一方面,特定控制器可以确定主通信总线是否发生故障,并且根据所述确定的结果,可以选择根据主通信总线的通信路径、根据子通信总线的通信路径以及穿过第三通信总线330的通信路径中的任一个将控制信号输出到输出侧转向控制装置200。
119.例如,如果第一主通信总线311处于正常状态,则第一控制器110通过根据第一主通信总线311的通信路径
①
将控制信号输出到输出侧转向控制装置200。
120.作为另一示例,如果第一主通信总线311发生故障,则第一控制器110通过根据第一子通信总线312的通信路径
②
将控制信号输出到输出侧转向控制装置200。
121.另一方面,如果主通信总线和子通信总线都发生故障,则特定控制器可以通过穿过第三通信总线330的通信路径输出控制信号。
122.例如,如果第一主通信总线311和第一子通信总线312发生故障,则第一控制器110通过根据第三通信总线330和第二通信总线320的通信路径
③
将控制信号输出到输出侧转向控制装置200。
123.尽管未示出,但上述示例可以类似地应用于第二控制器120。
124.如上所述,即使通信总线发生故障,根据本公开的转向控制装置100也通过另一通信路径连续地控制输出侧转向控制装置200,从而执行稳定的控制而不会出现暂时的性能下降。
125.另一方面,包括在根据本公开的转向控制装置15中的控制器可以监测其自身的状态。在下文中,将详细描述当控制器发生故障时执行故障安全的操作。
126.图9是用于说明当包括在根据第一实施例的转向控制装置15中的控制器发生故障时所执行的操作的框图。
127.参照图9,包括在转向控制装置15中的多个控制器中的每一个可以通过监测从外部提供的电源电压是否中断或发生短路,或者通过将自身计算出的控制值与由另一控制器计算出并通过第三通信总线330接收到的控制值进行比较来确定自身的状态是否为故障。
128.如果特定控制器发生故障,与上述通信总线的故障不同,处于异常状态的特定控制器的控制信号可能是不准确的控制信号。
129.特别地,如果处于异常状态的特定控制器作为主控制器进行操作,则需要将特定控制器对输出侧转向控制装置200的控制权转移给另一个控制器。
130.参照图9,例如,作为主控制器进行操作的第一控制器110可以确定第一控制器110是否发生故障,并且可以基于确定结果将对输出侧转向控制装置200的控制权转移给第二控制器120。此外,当控制权被转移时,作为子控制器进行操作的第二控制器120执行控制输出侧转向控制装置200的操作。
131.如上所述,根据本公开的转向控制装置15可以通过区分控制器的故障和通信总线的故障来执行故障安全,从而在不中断的情况下持续提供转向辅助动力。
132.图10是示出根据本公开的转向控制装置15的第二实施例的框图,并且图11是示出其中根据第二实施例的输入侧转向控制装置100输出控制信号的实施例的框图。
133.参照图10,包括在根据本公开的转向控制装置15中的多个控制器全部可以作为主控制器进行操作。在这种情况下,多个控制器可以分别计算转向控制值,并分别输出从与转向控制值相对应的控制信号划分出的信号。
134.另一方面,第一通信总线310、第二通信总线320和第三通信总线330中的每一个可以被配置为多个,并且每个通信总线可以用于具有相同优先级的内部通信,或者可以用于具有不同优先级的内部通信。
135.这里,多个控制器中的每一个可以确定连接到输出侧转向控制装置200的通信总线是否发生故障。
136.参照图11,例如,第一控制器110确定多个第一通信总线310是否发生故障,第二控制器120确定多个第二通信总线320是否发生故障。
137.如果有发生故障的通信总线,则多个控制器中的每一个可以通过处于正常状态的另一通信总线将从控制信号划分出的信号输出到输出侧转向控制装置200。
138.参照图11,例如,如果多个第一通信总线310中的任何一个第一通信总线310发生故障,则第一控制器110通过处于正常状态的第一通信总线310将从控制信号划分出的第一信号输出到输出侧转向控制装置200。另一方面,如果多个第二通信总线320中的任何一个第二通信总线320发生故障,则第二控制器120通过处于正常状态的第二通信总线320将从控制信号划分出的第二信号输出到输出侧转向控制装置200。在这种情况下,控制信号等于第一信号和第二信号的总和。
139.尽管未示出,根据图10和图11中所示的第二实施例的转向控制装置15可以执行与根据第一实施例的转向控制装置15的相同的功能。
140.根据本公开,即使通信总线发生故障,根据第二实施例的转向控制装置15也持续提供转向辅助动力而不会中断控制,从而使驾驶员的驾驶感受的差异最小化。
141.图12是示出根据本公开的转向控制装置15的第三实施例的框图。图13是示出其中根据第三实施例的输入侧转向控制装置100输出控制信号的实施例的框图。图14是用于说明当包括在根据第三实施例的转向控制装置15中的控制器发生故障时所执行的操作的框图。
142.参照图12,如上所述,根据本公开的转向控制装置15可以包括多个控制器。例如,转向控制装置15可以包括输入侧转向控制装置100,并且输入侧转向控制装置100可以包括第一控制器110和第二控制器120。
143.如上面参照图4所描述的,第一控制器110和第二控制器120可以控制输出侧转向控制装置200。也就是说,第一控制器110和第二控制器120中的至少一个可以:接收方向盘
的转向信息,计算转向控制值,并生成指示转向控制值的控制信号。
144.在这种情况下,如上所述,在第一控制器110和第二控制器120都是主控制器的情况下,第一控制器110和第二控制器120都可以生成控制信号。可选地,如果第一控制器110和第二控制器120中的任何一个为主控制器,则只有主控制器可以生成控制信号,并且当主控制器发生故障时,子控制器可以生成控制信号。
145.第一控制器110可以通过第五通信总线350连接到输出侧转向控制装置200和第二控制器120。具体地,第一控制器110和第二控制器120可以连接到沿一个方向延伸的第五通信总线350,并且第一控制器110和输出侧转向控制装置200可以连接到沿另一个方向延伸的第五通信总线350。
146.第二控制器120可以通过第六通信总线360连接到输出侧转向控制装置200和第一控制器110。具体地,第一控制器110和第二控制器120连接到沿一个方向延伸的第六通信总线360,并且第二控制器120和输出侧转向控制装置200可以连接到沿另一个方向延伸的第六通信总线360。
147.这里,第五通信总线350和第六通信总线360可以用于如上所述的具有相同优先级的通信,或者多个通信总线中的每一个的优先级可以彼此不同。例如,第五通信总线350用作主通信总线,第六通信总线360用作子通信总线。然而,本发明不限于此。
148.另一方面,第一控制器110和第二控制器120中的至少一个可以确定第五通信总线350和第六通信总线360中的任何一个是否发生故障。例如,第一控制器110确定第五通信总线350是否发生故障或者确定第六通信总线360是否发生故障。然而,本发明不限于此。
149.这里,第一控制器110和第二控制器120中的至少一个可以基于确定结果通过处于正常状态的通信总线将控制信号输出到输出侧转向控制装置200。
150.参照图13,例如,第一控制器110确定第五通信总线350是否发生故障。如果第五通信总线350发生故障,则第一控制器110通过处于正常状态的第六通信总线360将控制信号输出到输出侧转向控制装置200。然而,本发明不限于此。
151.另一方面,在第五通信总线350和第六通信总线360中的任何一个为主通信总线而另一个为子通信总线的情况下,第一控制器110和第二控制器120中的至少一个可以通过主通信总线将控制信号输出到输出侧转向控制装置200,如果主通信总线发生故障,则可以通过子通信总线将控制信号输出到输出侧转向控制装置200。
152.例如,在第五通信总线350是优先于第六通信总线360被使用的主通信总线的情况下,第一控制器110可以确定第一通信总线310是否发生故障,如果第五通信总线350发生故障,则可以通过第六通信总线360将控制信号输出到输出侧转向控制装置200,或者,如果第五通信总线350没有发生故障,则可以通过第五通信总线350将控制信号输出到输出侧转向控制装置200。然而,本发明不限于此。
153.尽管未示出,但上述示例可以类似地应用于第二控制器120,并且除了上述功能之外,根据第三实施例的转向控制装置15可以执行与根据第一和第二实施例中的每一个实施例的转向控制装置相同的功能。
154.另一方面如上面参照图9所描述的,包括在根据第三实施例的转向控制装置15中的控制器可以监测其自身的状态。此外,如果作为主控制器进行操作的控制器处于故障或异常状态,则可以将对包括在主控制器中的输出侧转向控制装置200的控制权转移到子控
制器。
155.参照图14,例如,作为主控制器进行操作的第一控制器110确定第一控制器110是否发生故障,并基于确定结果将对输出侧转向控制装置200的控制权转移到第二控制器120。此外,当控制权被转移后,第二控制器120执行控制输出侧转向控制装置200的操作。
156.具体地,如果第一控制器110处于正常状态并且第五通信总线350发生故障,则第一控制器110通过第六通信总线360将控制信号输出到输出侧转向控制装置200。另一方面,如果第一控制器110发生故障,则第一控制器110将控制权转移到第二控制器120。然而,本发明不限于此。
157.如上所述,根据第三实施例的转向控制装置15提供有效地布置通信总线并实现高度集成的效果,从而减轻车辆的重量并降低制造成本。
158.图15是示出根据本公开的的转向控制装置15的第四实施例的框图。图16是示出其中根据第四实施例的输入侧转向控制装置100输出控制信号的实施例的框图。图17是用于说明当包括在根据第四实施例的转向控制装置15中的控制器发生故障时所执行的操作的框图。
159.参照图15,根据第四实施例的输入侧转向控制装置100可以利用上面参照图3描述的公共通信总线将控制信号输出到输出侧转向控制装置200。
160.具体地,转向辅助系统1可以包括:转向控制装置15,包括输入侧转向控制装置100和输出侧转向控制装置100,以及至少一个公共通信总线400a、400b,连接输入侧转向控制装置100和输出侧转向控制装置200。
161.这里,转向控制装置100例如可以包括:通过第一通信总线310连接到输出侧转向控制装置200的第一控制器110,以及通过第三通信总线330连接到第一控制器110的第二控制器120。
162.在这种情况下,第一控制器110可以作为主控制器进行操作,并且第二控制器120可以作为子控制器进行操作。然而,本发明不限于此,如果第一通信总线310连接到第二控制器120和输出侧转向控制装置200,则第二控制器120可以作为主控制器进行操作。
163.这里,第一通信总线310可以与上面参照图3至图10的描述的第一通信总线310相同,并且第三通信总线330可以与上面参照图3至图10描述的第三通信总线330相同。然而,本发明不限于此。
164.另一方面,在第一控制器110为主控制器的情况下,第一控制器110可以接收方向盘的转向信息,计算转向控制值以生成指示转向控制值的控制信号,确定第一通信总线310是否发生故障,并基于确定结果通过处于正常状态的第一通信总线310和公共通信总线中的至少一个将控制信号输出到输出侧转向控制装置200。
165.例如,如果第一通信总线310发生故障,则第一控制器110通过公共通信总线将控制信号输出到输出侧转向控制装置200。如果第一通信总线310处于正常状态,则第一控制器110通过第一通信总线310将控制信号输出到输出侧转向控制装置200。
166.这里,在有多个公共通信总线的情况下,也可以有多条路径,通过公共通信总线通过该多条路径将控制信号传输到输出侧转向控制装置200。
167.参照图16,例如,公共通信总线包括连接到第一控制器110的第一公共通信总线400a和连接到第二控制器120的第二公共通信总线400b。如果第一通信总线310发生故障,
则第一控制器110通过第一公共通信总线400a和第二公共通信总线400b中的至少一个将控制信号输出到输出侧转向控制装置200。
168.具体地,如果第一通信总线310发生故障,则可以通过根据第一公共通信总线400a的通信路径
①
将由第一控制器110生成的控制信号传输到输出侧转向控制装置200,或者可以通过根据第三通信总线330和第二公共通信总线400b的通信路径
②
将控制信号传输到输出侧转向控制装置200。
169.另一方面,如上面参照图9所描述的,包括在根据第四实施例的转向控制装置15中的控制器可以监测自身的状态,在作为主控制器进行操作的控制器处于异常状态的情况下,可以转移主控制器的控制权。
170.参照图17,例如,作为主控制器进行操作的第一控制器110确定第一控制器110是否发生故障,并基于确定结果将对输出侧转向控制装置200的控制权转移到第二控制器120。此外,当控制权被转移后,第二控制器120控制输出侧转向控制装置200。
171.具体参照图17,例如,如果第一控制器110处于正常状态并且第一通信总线310发生故障,则第一控制器110通过公共通信总线将控制信号输出到输出侧转向控制装置200,并且如果第一控制器110发生故障,则第一控制器将控制权转移到第二控制器120。
172.在这种情况下,如果控制权被转移,则第二控制器120可以通过公共通信总线将控制信号输出到输出侧转向控制装置200。
173.参照图17,例如,具有控制权的第二控制器120通过根据第二公共通信总线400b的通信路径
①
将控制信号输出到输出侧转向控制装置200。然而,本发明不限于此,具有控制权的第二控制器120可以通过根据第一公共通信总线400a的通信路径将控制信号输出到输出侧转向控制装置200。
174.如上所述,根据第四实施例的转向控制装置15可以通过使通信总线的布置最小化的同时实现基于冗余的故障安全来提供确保驾驶稳定性以及降低通信总线的收发器和线束的成本的效果。
175.图18是用于说明输出侧转向控制装置的框图。
176.参照图18,输出侧转向控制装置200可以包括第三控制器210和第四控制器220。输出侧转向控制装置200可以包括能够从输入侧转向控制装置200接收控制信号并将其输出到转向电机21的控制器。此外,输出侧转向控制装置200可以接收由输出侧致动器20的齿条位置传感器24、转向角度传感器(未示出)、横摆率传感器(未示出)检测到的传感器信息,并且可以生成针对控制信号的反馈信号,并将反馈信号输出到输入侧转向控制装置100。
177.此外,多个这样的控制器可以被配置为实现冗余系统。第三控制器210可以通过第四通信总线340连接到第四控制器220。此外,根据上述实施例,第三控制器210和第四控制器220可以以各种形式连接到第一控制器110。
178.在如图4和图5的实施例的情况下,第三控制器210通过第一通信总线310连接到第一控制器110,第四控制器220通过第二通信总线320连接到第二控制器120。
179.在如图6和图7的实施例的情况下,第三控制器210可以通过多个第一通信总线310a和310b连接到第一控制器110,第四控制器220可以通过第二通信总线320连接到第二控制器120。
180.在如图8所示的实施例的情况下,第三控制器210可以通过第一主通信总线311和
第一子通信总线312连接到第一控制器110,第四控制器220可以通过第二主通信总线(未示出)和第二子通信总线(未示出)连接到第二控制器120。
181.在图4至图8的情况下,如果不能将控制信号从第一控制器110直接输出到第三控制器210,则可以通过穿过第二控制器120的通信路径
②
将控制信号输出到第三控制器210。在这种情况下,通信路径可以由连接第一控制器110和第二控制器120的第三通信总线330、连接第二控制器120和第四控制器的第二通信总线以及连接第四控制器220和第三控制器210的第四通信总线340来形成。
182.在如图9所示的实施例的情况下,第三控制器210可以通过第一通信总线310连接到第一控制器110,并且第四控制器220可以通过第二通信总线320连接到第二控制器120。如果第一控制器110发生故障,则具有对输出侧转向控制装置的控制权的第二控制器120可以通过第二通信总线320和第四通信总线340将控制信号输出到第三控制器210。
183.类似地,如果第一控制器110处于正常状态并且作为控制输出侧转向控制装置的主控制器的第三控制器210发生故障,则可以将对输出侧致动器的控制权转移到作为子控制器的第四控制器。在这种情况下,第一控制器110可以通过第三通信总线330和第二通信总线320将控制信号输出到第四控制器220。
184.在如图10所示的实施例的情况下,第三控制器210和第一控制器110所连接的第一通信总线310、第四控制器220和第二控制器120所连接的第二通信总线320、第三通信总线330、以及第三控制器210和第四控制器220所连接的第四通信总线340可以配置为多个,每个通信总线可以用于具有相同优先级的内部通信,也可以用于具有不同优先级的内部通信。这里,多个控制器中的每一个可以确定所连接的通信总线是否发生故障。
185.因此,在如图11的实施例的情况下,如果多个第一通信总线310a和310b中的任何一个310a发生故障,则第一控制器110可以通过处于正常状态的第一通信总线310b(图11中的
①
)将控制信号传输到第三控制器210。此外,如果多个第二通信总线320a和320b中的任何一个320a发生故障,则第二控制器120可以通过处于正常状态的第二通信总线320b(图11中的
②
)将控制信号传输到第四控制器220。
186.在如图12至图14所示的实施例的情况下,第一控制器110可以通过第五通信总线350连接到第二控制器120、第三控制器210和第四控制器220。此外,第一控制器110可以通过第六通信总线360连接到第二控制器120、第三控制器210和第四控制器220。
187.因此,根据情况,第一控制器110或第二控制器120可以通过第五通信路径350将控制信号输出到第三控制器210或第四控制器220,或者可以通过第六通信路径360将控制信号输出到第三控制器210或第四控制器220。
188.在如图15至图17所示的实施例的情况下,第三控制器210可以通过第一公共通信总线400a和第一通信总线310连接到第一控制器110。此外,第四控制器220可以通过第四通信总线340连接到第三控制器210,并且可以通过第二公共通信总线400b连接到第二控制器120。
189.因此,如果第一通信路径310发生故障,则第一控制器110可以通过穿过第一公共通信总线400a的路径(图15中的
①
)以及穿过第三通信总线330、第二公共通信总线400b以及第四通信总线340的路径(图15中的
②
)将控制信号输出到第三控制器210。
190.此外,如果第一控制器110发生故障,则将对输出侧转向控制装置200的控制权转
移到第二控制器120,并且第二控制器120可以通过第二公共通信总线400b和第四通信总线340将控制信号输出到第三控制器210。
191.图19是示出根据本公开的转向控制装置的第五实施例的框图。
192.参照图19,根据第五实施例的输入侧转向控制装置100可以利用公共通信总线400将控制信号输出到输出侧转向控制装置200。
193.具体地,转向辅助系统1可以包括:输入侧致动器10、与输入侧致动器10机械分离的输出侧致动器20、用于控制输入侧致动器10的输入侧转向控制装置100、用于控制输出侧致动器20的输出侧转向控制装置200、以及连接输入侧致动器10、输出侧致动器20和转向控制装置15的至少一个公共通信总线400。
194.具体地,输入侧转向控制装置100可以包括:第一控制器110,其通过公共通信总线400连接到输出侧转向控制装置200并通过第三通信总线330连接到第二控制器120;以及第二控制器120,其通过第三通信总线330连接到第一控制器110并通过公共通信总线400连接到输出侧转向控制装置200。
195.此外,输出侧转向控制装置200可以包括:第三控制器210,其通过公共通信总线400连接到第一控制器110并通过第四通信总线340连接到第四控制器220;以及第四控制器220,其通过公共通信总线400连接到第二控制器120并通过第四通信总线340连接到第三控制器210。
196.更具体地,第三控制器210可以通过第一公共通信总线400a连接到第一控制器110,并且第四控制器220可以通过第二公共通信总线400b连接到第二控制器120。
197.另外,每个控制器可以确定连接到相应控制器的通信总线是否发生故障,并且可以根据确定结果设置通信路径。
198.例如,如果第一公共通信总线400a发生故障,则第一控制器110可以通过第三通信总线330、第二公共通信总线400b和第四通信总线340将控制信号输出到第三控制器210。
199.另一方面,如图8所示,输入侧转向控制装置100和输出侧转向控制装置200可以基于冗余系统执行故障安全功能。例如,在第一控制器110为主控制器并且第一控制器110发生故障的情况下,将对输出侧转向控制装置200的控制权转移到第二控制器120,第二控制器120可以通过第二公共通信总线400b和第四通信总线340将控制信号输出到第三控制器210。
200.此外,基于冗余系统的控制器(例如,第一控制器和第二控制器)可以输出用于确定彼此的状态的状态检查信号。可以以预设周期输出这种状态检查信号,响应于输出的状态检查信号,可以从控制器接收预设反馈信号。如果在预设时间内预设反馈信号被修改或未接收到预设反馈信号,则输出状态检查信号的控制器可以将对方控制器的状态确定为故障状态。
201.进一步地,在如图19所示的环境中,第一控制器110可以通过第三通信总线330将状态检查信号输出到第二控制器120以确定第二控制器120的状态。在这种情况下,如果第三通信总线330发生故障,则第一控制器110可以通过第一公共通信总线400a、第四通信总线340和第二公共通信总线400b将状态检查信号输出到第二控制器120。
202.控制器的状态检查可以应用于包括在同一冗余系统中的第三控制器210和第四控制器220。因此,如果第四通信总线340发生故障,则第三控制器210可以通过第一公共通信
总线400a、第三通信总线330和第二公共通信总线400b将状态检查信号输出到第四控制器220。
203.如上所述,转向辅助系统1可以在缺少连接在输入侧转向控制装置100和输出侧转向控制装置200之间的专用通信总线的情况下发送和接收数据。此外,即使特定的公共通信总线发生故障,也可以通过连接到另一控制器的公共通信总线来输出控制信号。
204.如上所述,根据本公开,可以提供一种转向控制装置以及转向辅助系统,即使通信总线发生故障,该转向控制装置和转向辅助系统也能够通过另一通信路径连续地控制输出侧转向控制装置200来执行稳定的控制而不会出现暂时的性能下降。
205.此外,根据本公开,可以提供一种转向控制装置以及转向辅助系统,即使通信总线发生故障,该转向控制装置和转向辅助系统也能够通过持续提供转向辅助动力而使驾驶员的驾驶感受的差异最小化。
206.此外,根据本公开,可以提供一种转向控制装置以及转向辅助系统,该转向控制装置和转向辅助系统能够通过有效地部署通信总线并实现高度集成来减轻车辆的重量并降低制造成本。
207.上述描述是为了使本领域的任何技术人员能够产生和使用本公开的技术思想,并且是在特定应用及其要求的背景下提供的。对所描述的实施例的各种修改、添加和替换对于本领域技术人员来说将是显而易见的,并且在不脱离本公开的精神和范围的情况下,本文定义的一般原理可以应用于其他实施例和应用。以上描述和附图仅出于说明的目的提供了本公开的技术思想的示例。也就是说,所公开的实施例旨在说明本公开的技术思想的范围。因此,本公开的范围不限于所示出的实施例,而是应被赋予与权利要求一致的最大的范围。本公开的保护范围应以所附权利要求为准,凡在其等效形式范围内的技术思想均应理解为被包括在本公开的保护范围内。
208.相关申请的交叉引用
209.本技术要求于2019年6月20日提交的申请号为10-2019-0073259的韩国专利申请的优先权,其所有内容通过引用并入本专利申请中。另外,当本专利申请出于与上述相同的原因而要求在美国以外的国家的优先权时,其全部内容通过引用并入本专利申请中。