1.本实用新型涉及汽车零部件在线装配调整领域,尤其涉及一种商用车汽车组合踏板在线调整台。
背景技术:
2.中国专利cn201921527667.1公开了一种踏板总成,其采用的为组合踏板。在商用车组合踏板装配中常采用的在线调整,通常由高度/行程工装配合人员手感及经验进行组合踏板的空行程、开关位置的调整,但因人工手感,人工观察开关信号灯,手动调整导致检测数据误差大、一致性差、节拍过长。
技术实现要素:
3.本实用新型所要解决的技术问题就是提供一种商用车汽车组合踏板自动在线调整台,主要包含制动开关调整机构、阿特拉斯电枪组合件、伺服电机调整臂,可以实现自动调整制动开关位置并根据扭矩信号,自动调整离合器泵顶杆及制动阀顶杆位置,自动调整离合/制动踏板初始位及终位。
4.为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
5.一种商用车汽车组合踏板在线调整台,包括台架,台架上安装有用于固定踏板总成的机架,台架上还安装有调整机构,调整机构包括分布在机架两侧的用于调整制动踏板空行程、以及离合踏板自由行程的电枪组合机构;电枪组合机构包括调整臂总成,调整臂总成的端部安装有用电枪总成,电枪上安装有气动夹爪,电枪可带动气动夹爪进行转动。
6.作为优选,调整臂总成包括底座,底座上安装有第一连接座,第一连接座可绕底座转动,第一连接座上铰接有第一摆臂组,第一摆臂组的另一端铰接有第二连接座,第二连接座上铰接有第二摆臂组,第二摆臂组的另一端铰接有第三连接座,电枪总成固定连接在第三连接座上。
7.作为优选,调整机构包括用于调整制动踏板位置的旋转机构,旋转机构包括安装在机架一侧的驱动电机,驱动电机连接有摆臂架,摆臂架安转在机架上,驱动电机与摆臂架连接带动摆臂架转动,离合器踏板或制动器踏板位于摆臂架的旋转路径上。
8.作为优选,摆臂架包括底部用于和踏板抵触的压板,压板上安装有角度传感器。
9.作为优选,调整机构还包括制动开关调整机构,制动开关位置调整机构包括支撑座,支撑座上安装有气动滑台,气动滑台上安装有伺服电机,伺服电机的输出端连接有丝杆螺母机构,丝杆螺母机构的螺母件上安装有刹车灯母头。
10.作为优选,台架上安装有转盘机构,机架安装在转盘上,电枪组合机构安装在台架的台面上。
11.通过以上技术方案,本实用新型具有以下技术效果:
12.本方案设计了一种商用车汽车组合踏板在线调整台,该调整台可以实现对制动踏板以及离合踏板位置的调整,而且控制精确,调整方便简单,上料不会出现干涉现象等优
点。
附图说明
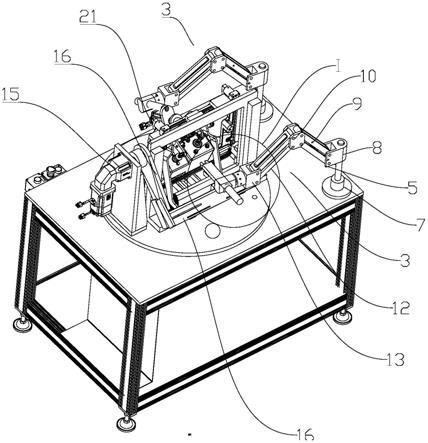
13.图1为装置的整体结构示意图,其中为了便于表达,图1中摆臂位置有多个。
14.图2为图1的局部放大图。
15.图3为装置的整体结构示意图。
16.图4是图3的局部放大图。
17.附图中各数字标号所指代的部位名称如下:1—台架、2—机架、3—电枪组合机构、4—电枪总成、5—调整臂总成、6—气动夹爪、7—底座、8—第一连接座、9—第一摆臂组、10—第二连接座、11—第二摆臂组、12—第三连接座、13—旋转机构、15—驱动电机、16—摆臂架、17—压板、19—制动开关调整机构、20—支撑座、21—气动滑台、22—伺服电机、23—丝杆螺母机构、24—刹车灯母头、25—转盘机构。
具体实施方式
18.下面结合附图与实施例对本实用新型作进一步详细描述。
19.实施例1
20.一种商用车汽车组合踏板在线调整台,包括台架1,台架1上安装有用于固定踏板总成的机架2,台架1上还安装有调整机构,调整机构包括分布在机架2两侧的用于调整制动踏板空行程、以及离合踏板自由行程的电枪组合机构3;电枪组合机构3包括调整臂总成5,调整臂总成5的端部安装有用电枪总成4,电枪上安装有气动夹爪6,电枪可带动气动夹爪6进行转动。其中台架1本身采用铝型材框架结构,本方案中的电气系统主要元器件使用欧姆龙产品,其余元器件使用国产优质产品。气动元器件使用smc产品。该调整台可以实现不同尺寸组合踏板调整,产品切换时,把产品预压紧手动夹紧器处于打开状态即可,无需拆卸;产品气动夹紧缸也无需拆卸,通过电气系统进行产品切换控制,切换产品时只需安装夹具过渡板。调整臂总成5包括底座7,底座7上安装有第一连接座8,第一连接座8可绕底座7转动,第一连接座8上铰接有第一摆臂组9,第一摆臂组9的另一端铰接有第二连接座10,第二连接座10上铰接有第二摆臂组11,第二摆臂组11的另一端铰接有第三连接座12,电枪总成4固定连接在第三连接座12上。
21.由于工件装夹部分不是本技术的核心发明点且工件装夹属于本领域常用的技术手段,本实施例不进行展开叙述。
22.本技术设计有两套电枪总成4,分别用于调整制动踏板的空程调整以及用于离合踏板的自由行程调整。
23.其中制动踏板空行程调整如下:调整调整臂的转向使启动夹爪靠近踏板总成的制动阀顶杆位置,然后打开气动夹爪6,夹爪夹紧制动阀顶杆,启动电枪组合件,带动顶杆向下旋出,当扭矩达到规定扭矩时自动停止即顶杆与制动阀活塞间隙为零,工作台指示板绿灯亮起,手动锁紧顶杆螺母。
24.其中离合踏板自由行程调整过程如下:
25.调整调整臂的转向使启动夹爪靠近踏板总成的制动阀顶杆位置,然后打开气动夹爪6,夹爪夹紧离合器泵顶杆,启动电枪组合件,带动顶杆向下旋出,当扭矩达到规定扭矩时
自动停止即顶杆与离合器泵活塞间隙为零,工作台指示板绿灯亮起,手动锁紧顶杆螺母。
26.本实施例还提供了一种踏板位置调整的方案,调整机构包括用于调整制动踏板位置的旋转机构13,旋转机构13包括安装在机架2一侧的驱动电机15,驱动电机15连接有摆臂架16,摆臂架16安转在机架2上,驱动电机15与摆臂架16连接带动摆臂架16转动,离合器踏板或制动器踏板位于摆臂架16的旋转路径上。摆臂架16包括底部用于和踏板抵触的压板17,压板17上安装有角度传感器。当需要进行调整时,驱动电机15启动带动摆臂架16转动抵触在相应的踏板上,位置调整结束后再进行手动锁紧。
27.比如制动踏板高度尺寸调整如下:
28.驱动电机15旋转带动摆臂架16转动,摆臂架16带动压板17控制制动踏板下压,当转动至规定角度即前期由规定高度计算出的角度,其中转动角度由角度传感器获取,转至规定角度后,人工拧紧限位螺钉。
29.离合器踏板高度尺寸调整:
30.驱动电机15旋转带动摆臂架16转动,摆臂架16带动压板17控制离合器踏板下压,当转动至规定角度即前期由规定高度计算出的角度,其中转动角度由角度传感器获取,转至规定角度后,人工拧紧限位螺钉。
31.离合器踏板总行程调整:
32.驱动电机15旋转带动摆臂架16转动,摆臂架16带动压板17控制离合器踏板下压,当转动至规定角度即前期由规定全行程计算出的角度,其中转动角度由角度传感器获取,转至规定角度后,人工拧紧限位螺钉。
33.本实施例还给出了调整制动灯开关位置的技术方案:
34.调整机构还包括制动开关调整机构19,制动开关位置调整机构包括支撑座20,支撑座20上安装有气动滑台21,气动滑台21上安装有伺服电机22,伺服电机22的输出端连接有丝杆螺母机构23,丝杆螺母机构23的螺母件上安装有刹车灯母头24。
35.其中制动灯开关位置调整过程如下:
36.旋转调整机构下压制动踏板12mm即制动灯开关行程12mm,制动开关调整机构19启动滑台启动,启动滑台带动伺服电机22以及丝杆螺母机构23等沿导轨方向前进,然后伺服段集启动,带动丝杆螺母机构23进给,然后丝杆螺母机构23带动制动灯开关配套的母头推入至踏板总成的预装位置,旋转继续,直至需要的信号接收到,旋转停止,操作者拧紧制动灯开关螺母,工作台指示板绿灯亮起,步进电机带动丝杆螺母机构23后撤到原位。
37.实施例2
38.本实施例与实施例1的区别之处在于:伺服电机为步进电机。
39.实施例3
40.本实施例与实施例1的区别之处在于:为了方便安装踏板总成,本实施中台架1上安装有转盘机构25,机架2安装在转盘上,电枪组合机构3安装在台架1的台面上。转盘结构能够在装拆踏板总成时避免与电枪总成4形成干涉。