车载ato模块与bcu控制器的架构和信息融合系统
技术领域
1.本发明属于轨道交通技术领域,具体涉及列车控制技术。
背景技术:
2.在目前的地铁系统中,信号和车辆是相对独立的两个系统,仅通过部分的继电器和网络接口来交互信息,以满足信号系统执行安全监督防护、车门控制、速度控制等基本功能。
3.现有技术,由于信号系统和车辆系统的独立性,导致在很多应用场景下,信号系统仅依赖于自己有限的输入来做控制,降低了系统的可用性。比如ato站台停车性能的提升空间和稳定性不高,利用速度反馈的控车方式会带来滞后超调现象,传统ato在低速控制时无法保证距离精度。
技术实现要素:
4.本发明所要解决的技术问题就是提供一种车载ato模块与bcu控制器的架构和信息融合系统,实现车载ato和bcu的结构融合和信息交互,解决信号系统和车辆系统相互独立造成的问题。
5.为解决上述技术问题,本发明采用如下技术方案:
6.车载ato模块与bcu控制器的架构和信息融合系统,包括bcu控制器以及车载ato模块,所述bcu控制器设有can通信接口及电源接口,所述车载ato模块与can通信接口连接,以实现车载ato模块与bcu控制器之间的信息交互,所述车载ato模块与电源接口连接,以实现bcu控制器为车载ato模块供电;其中,所述bcu控制器向ato模块共享的信息包括:车辆以及牵引/制动能力,车辆以及牵引/制动状态,车辆以及牵引/制动状态包括:制动系统所有轴速,制动系统各轮轴滑行、空转信息,车辆载重信息;所述ato模块向bcu控制器共享的信息包括:目标停车距离、目标速度曲线、线路条件,牵引/制动指令和级位,运行工况,功能指令。
7.优选的,所述bcu控制器包括电路板,所述can通信接口及电源接口设于电路板的背板上。
8.优选的,在车头和车尾均对应设置一个bcu控制器以及车载ato模块,且两个bcu控制器以及车载ato模块均为双机热备冗余的结构。
9.本发明采用的技术方案,车载ato模块与can通信接口连接,实现了车载ato模块与bcu控制器之间的信息交互,并且车载ato模块与电源接口连接,可以通过bcu控制器为车载ato模块供电,实现车载ato和bcu的结构融合。因此,具有如下有益效果:
10.1、由于ato与bcu融合部署,实现了信息交互,因此ato可以利用车辆的载重信息、牵引/制动能力与状态以及指令反馈信息等,缩短ato闭环控制的周期,并且可以结合人工智能算法在线实时生成最优ato目标速度曲线并优化目标曲线跟踪策略,从而提高ato相关性能,包括ato运行速度、冲动抑制水平、定点停车控制、低速爬行以及列车能耗等。
11.2、ato与bcu系统融合后,可以利用车辆性能仿真模型提前在实验室测试和工厂测试时进行测试调整,在真实列车上对调整结果进行微调,减少现场调试时间。
12.本发明的具体技术方案及其有益效果将会在下面的具体实施方式中结合附图进行详细的说明。
附图说明
13.下面结合附图和具体实施方式对本发明作进一步描述:
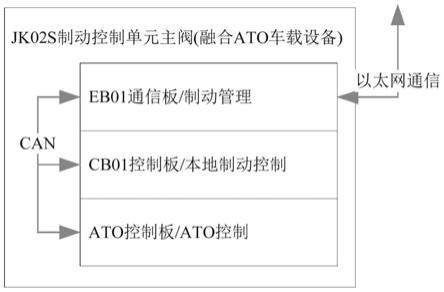
14.图1为车载ato和bcu的融合结构示意图。
15.图2为车载ato和bcu的信息交互示意图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.ato:列车自动运行系统
18.bcu:制动控制单元
19.如图1和图2所示,车载ato模块与bcu控制器的架构和信息融合系统,包括bcu控制器以及车载ato模块,在车头和车尾均对应设置一个bcu控制器以及车载ato模块,且两个bcu控制器以及车载ato模块均为双机热备冗余的结构。
20.其中,所述bcu控制器设有can通信接口及电源接口,所述车载ato模块与can通信接口连接,以实现车载ato模块与bcu控制器之间的信息交互,所述车载ato模块与电源接口连接,以实现bcu控制器为车载ato模块供电。
21.ato与bcu融合部署,ato与bcu共享测速信息、列车载重、牵引制动状态,在不影响运营效率的基础上,生成更加节能、更加高效、对车辆磨损更少的ato控车曲线,并在在停站对位时,由更高的精度和舒适度。
22.具体的,所述bcu控制器包括电路板,所述can通信接口及电源接口设于电路板的背板上。
23.如图2所示,bcu向ato共享的主要信息包括:
24.车辆以及牵引/制动能力;
25.车辆以及牵引/制动状态,包括:
26.制动系统所有轴速;
27.制动系统各轮轴滑行、空转信息;
28.车辆载重信息。
29.ato向bcu共享的主要信息包括:
30.目标停车距离、目标速度曲线、线路条件等精确停车相关信息;
31.牵引/制动指令和级位;
32.运行工况;
33.功能指令。
34.ato与bcu实现信息交互后,ato通过利用车辆的载重信息、牵引/制动能力与状态以及指令反馈信息等,缩短ato闭环控制的周期,结合人工智能算法在线实时生成最优ato目标速度曲线并优化目标曲线跟踪策略,从而提高ato相关性能,包括ato运行速度、冲动抑制水平、定点停车控制、低速爬行以及列车能耗等;ato与bcu融合后,可以利用车辆性能仿真模型提前在实验室测试和工厂测试时进行测试调整,在真实列车上对调整结果进行微调,减少现场调试时间。
35.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
技术特征:
1.车载ato模块与bcu控制器的架构和信息融合系统,其特征在于:包括bcu控制器以及车载ato模块,所述bcu控制器设有can通信接口及电源接口,所述车载ato模块与can通信接口连接,以实现车载ato模块与bcu控制器之间的信息交互,所述车载ato模块与电源接口连接,以实现bcu控制器为车载ato模块供电;其中,所述bcu控制器向ato模块共享的信息包括:车辆以及牵引/制动能力,车辆以及牵引/制动状态,车辆以及牵引/制动状态包括:制动系统所有轴速,制动系统各轮轴滑行、空转信息,车辆载重信息;所述ato模块向bcu控制器共享的信息包括:目标停车距离、目标速度曲线、线路条件,牵引/制动指令和级位,运行工况,功能指令。2.根据权利要求1所述的车载ato模块与bcu控制器的架构和信息融合系统,其特征在于:所述bcu控制器包括电路板,所述can通信接口及电源接口设于电路板的背板上。3.根据权利要求1所述的车载ato模块与bcu控制器的架构和信息融合系统,其特征在于:在车头和车尾均对应设置一个bcu控制器以及车载ato模块,且两个bcu控制器以及车载ato模块均为双机热备冗余的结构。
技术总结
本发明公开了一种车载ATO模块与BCU控制器的架构和信息融合系统,包括BCU控制器以及车载ATO模块,所述BCU控制器设有CAN通信接口及电源接口,所述车载ATO模块与CAN通信接口连接,以实现车载ATO模块与BCU控制器之间的信息交互,所述车载ATO模块与电源接口连接,以实现BCU控制器为车载ATO模块供电。本发明采用的技术方案,实现了车载ATO模块与BCU控制器之间的信息交互,并且通过BCU控制器为车载ATO模块供电。电。电。
技术研发人员:吴苏娇 林宏泉
受保护的技术使用者:浙江众合科技股份有限公司
技术研发日:2021.09.23
技术公布日:2021/12/30