1.本发明涉及地铁施工技术领域,特别是涉及一种地铁接触网全参数无轨测量施工方法。
背景技术:
2.随着我国经济社会和城市的不断发展,市民对地铁舒适度、快捷性要求日益提高,高速地铁(市域快线)孕育而生,从而对接触网测量及安装精度提出了更高的要求。接触网的热滑开通是地铁建设进入综合联调的里程碑事件。然而受建设提速、前期征拆、土建、轨道施工滞后影响,接触网施工几乎“零工期”。因此接触网悬挂点的无轨测量计算是最关键的一环,将直接影响接触网的材料定制、安装质量、有效工期等。一般地铁刚性接触网主要由化学锚栓、悬吊槽钢、汇流排、接触线、架空地线等组成。高速地铁与一般地铁刚性接触网组成不同,主要由滑槽、t型螺栓、吊柱、旋臂等组成,属于新型地铁悬挂定位装置。
3.传统无轨测量用全站仪将线路中心线放样在隧道地面上形成线路中心在隧道地面的标记,通过拉卷尺的方法在区间里标记悬挂点的位置,然后用投线仪将悬挂点处的线路中心标记点铅锤投影在隧道顶面上并进行标记。但此方法存在曲线段误差大,直线段精度不高,锚栓长度无法确定等缺陷,特别是在高速地铁测量上无法实现吊柱长度、顶板角度及吊柱安装整正角度、悬臂在吊柱上安装高度的测量计算工作,无法满足高速地铁无轨测量施工基本要求。
4.传统的施工流程:
5.坐标计算
→
隧道地面线路中心测量放样
→
隧道地面定位点测量放样
→
隧道地面定位点投影至隧道顶面
→
隧道顶面定位点偏距测量
→
无轨施工。
6.传统无轨测量施工,根据接触网平面布置图计算得到每一个定位点的里程,根据设计院提供的线路信息计算每一个定位点处线路中心的坐标,利用全站仪进行线路中心坐标放样并标记,将隧道地面上的线路中心标记垂直投影至隧道顶面,对于直线段,隧道地面上的线路中心标记在隧道顶面的垂直投影即为受电弓中心在隧道顶面的投影。对于曲线段,受电弓中心在隧道顶面的投影与线路中心标记在隧道顶面的垂直投影之间存在偏移量,曲线段误差较大。接触网施工时,根据标记定位点打孔,安装化学锚栓及悬挂装置。无轨测量工序较为复杂,测量耗时较长。多次测量存在累计误差,不能保证施工质量。
7.现有技术的主要缺点包括:
8.①
无轨测量标记悬挂定位点时,存在多次测量,耗时长,不能一次测量定位,且多次测量存在累计测量误差。
9.②
曲线段测量时,线路中心线与受电弓中心线不重合,误差较大,精度不够,后期返工风险大。
10.③
现有无轨测量技术只能完成一般地铁悬挂定位点位置的测量,无法测量锚栓长度,无轨测量价值太低,特别是在高速地铁无轨测量上无法实现吊柱长度、顶板角度及吊柱安装整正角度、悬臂在吊柱上安装高度的测量计算工作,无法满足高速地铁无轨测量施工
基本要求。
技术实现要素:
11.本发明的目的是提供一种地铁接触网全参数无轨测量施工方法,以解决上述现有技术存在的问题,得到吊柱长度、顶板角度、吊柱安装整正角度及悬臂在吊柱上的安装高度,实现了全参数无轨测量及精准装配施工。
12.为实现上述目的,本发明提供了如下方案:
13.本发明提供了一种地铁接触网全参数无轨测量施工方法,包括以下步骤:
14.s1,通过悬挂点的里程、悬挂点偏离受电弓中心的距离得到悬挂点的坐标;
15.s2,测量放样及复核:将悬挂点的坐标导入全站仪,利用cpiii控制桩进行全站仪设站,对悬挂点逐点放样标记,放样后记录对应的悬挂点高程h,并得到测量角度α;
16.s3,采用悬挂点高程h和测量角度α进行全参数计算,得到吊柱长度、吊柱安装整正角度、吊柱生产角度、悬臂在吊柱上的安装高度。
17.优选地,所述s2包括以下步骤:
18.s21,将待测区段cpiii及悬挂点的坐标导入全站仪;
19.s22,严格按照全站仪cpiii设站要求设站;
20.s23,调整全站仪放样模式,调出悬挂点,开始对悬挂点进行放样,根据全站仪激光指示点进行标记,记为标记点,同时按接触网测量要求书写悬挂点号及拉出值,记录此时全站仪测得的悬挂点高程h;
21.s24,向下旋转全站仪,将全站仪的指示激光调整至标记点正下方的盾构壁上,调节测量参数,使测量点的坐标与悬挂点的坐标一致,将电子水平尺中心对准激光指示点,测量角度,记录测量角度α。
22.优选地,所述s23中,调整全站仪的放样模式为跟踪测量、免棱镜模式。
23.优选地,所述s23中,全站仪为带伺服马达的全站仪。
24.优选地,所述s23中,悬挂点的放样原则上只能在全站仪设站所用两对cpiii控制桩内,不得超范围放样。
25.优选地,所述s23中,新设站放样前需对上一站所放样最近一个悬挂点进行复测,做好两站间的交叉校核,以确保测量的准确性。
26.优选地,所述s3中,吊柱长度h为:
27.h=(h-h0)
÷
cos[arcsin(h
超
÷
1435)]
±
p
×h超
÷
1435-h
轨
[0028]
其中,h为全站仪所测得的悬挂点高程,单位米;h0为悬挂点处轨面高程,单位米;h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米;p为吊柱距线路中心的距离,单位米;h
轨
为吊柱底至轨面的距离,单位米。
[0029]
优选地,所述s3中,吊柱安装整正角度θ为:
[0030]
θ=arcsin(h
超
÷
1435)
÷
π
×
180
°
[0031]
其中,h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米。
[0032]
优选地,所述s3中,吊柱生产角度β为:
[0033]
β=(90
°‑
α)
±
θ
[0034]
其中,α为悬挂点处的测量角度,单位度;θ为吊柱安装整正角度,单位度。
[0035]
优选地,所述s3中,悬臂在吊柱上的安装高度h
安
为:
[0036]h安
={(h-h0)
÷
cos[arcsin(h
超
÷
1435)]
±
p
×h超
÷
1435}
×
1000-h
接-h1[0037]
其中,h为全站仪所测得的悬挂点高程,单位米;h0为悬挂点处轨面高程,单位米;h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米;p为吊柱距线路中心的距离,单位米;h
接
为接触网导高,单位毫米;h1为滑槽厚度、吊柱顶板厚度、接触线距安装底座上抱箍的距离之和,单位毫米。
[0038]
本发明相对于现有技术取得了以下技术效果:
[0039]
本发明通过理论计算悬挂点坐标,采用全站仪直接放样定位,可满足不同隧道断面、不同速度等级接触网无轨测量施工需求;与传统无轨测量施工相比,本发明采用大地坐标直接定位,可进行直线及曲线的高精度定位测量,同时还可测定和计算吊柱长度、顶板角度、吊柱安装整正角度及悬臂在吊柱上的安装高度,实现了全参数无轨测量及精准装配施工。高速地铁接触网全参数无轨测量以全站仪、角度尺作为主要测量设备,以高精度的cpiii为控制桩进行测量施工,满足高速地铁高精度要求,可广泛运用于地铁接触网无轨测量施工。
附图说明
[0040]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0041]
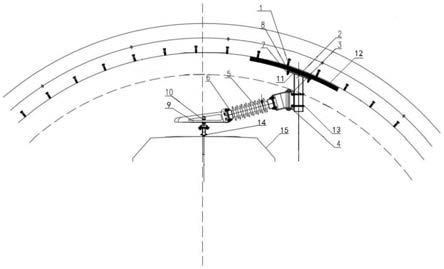
图1为接触网悬挂安装示意图;
[0042]
其中:1-t型螺栓;2-吊柱;3-旋转底座;4-绞座;5-刚性悬挂支柱绝缘子;6-螺杆;7-螺帽;8-防松垫圈;9-定位线夹连接板;10-定位线夹;11-吊柱顶板;12-滑槽;13-抱箍;14-接触线;15-受电弓。
具体实施方式
[0043]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0044]
本发明的目的是提供一种地铁接触网全参数无轨测量施工方法,以解决上述现有技术存在的问题,得到吊柱长度、顶板角度、吊柱安装整正角度及悬臂在吊柱上的安装高度,实现了全参数无轨测量及精准装配施工。
[0045]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0046]
本实施例提供了一种地铁接触网全参数无轨测量施工方法,包括以下步骤:
[0047]
s1,通过悬挂点的里程、悬挂点偏离受电弓15中心的距离得到悬挂点的坐标(x、y);计算前需提供轨道专业正式调线调坡(综合铺轨)图或相关数据。同时在统计接触网悬挂点里程及“限界”时需仔细校对,特别注意线路长短链后的里程正确性;
[0048]
其中,悬挂点偏离受电弓15中心的距离指悬挂点吊柱顶板11中心距离受电弓15中心线的距离;
[0049]
具体地,已知坐标计算起点里程l0,起点坐标(x0,y0),起点方位角γ,待算点里程l,分三种情况进行计算。
[0050]
直线段:通过线形函数x=x0+(l-l0)*cosγ;y=y0+(l-l0)*sinγ;
[0051]
圆曲线段:x=x0+cos[γ
±
(180
°
/π
×
l/r1)/2]
×
c1;y=y0+sin[γ
±
(180
°
/π
×
l/r1)/2]
×
c1;其中,c1为圆曲线段的弦长,r1为圆曲线段的圆半径;
[0052]
缓和曲线段:x=x0+cos(γ
±
δ/3)
×
c2;y=y0+sin(γ
±
δ/3)
×
c2;
[0053]
δ=(l-l0)2/2r2ls×
180
°
/π;c2=(l-l0)-(l-l0)5/90r
22
l
s2
;
[0054]
其中,ls代表缓和曲线总长,c2为缓和曲线段的弦长,r2为缓和曲线段的圆半径;
[0055]
s2,测量放样及复核:将悬挂点的坐标导入全站仪,利用cpiii控制桩进行全站仪设站,对悬挂点逐点放样标记,由于仅有x,y坐标,因此在盾构隧道测量时必定会存在隧道壁上下两个点。上侧点为悬挂点,放样后记录对应的悬挂点高程h,向下旋转仪器,找到下测点,根据激光指示点位置,用角度尺测量此位置的角度值α。因为圆型盾构隧道,上下两对称点切线与水平方向的夹角大小相等,同为α,即得到测量角度α;
[0056]
cpiii为轨道施工测量控制桩,是通过土建控制桩(cpii)延伸的测量控制点,cpiii控制桩经过验算平差等操作后比土建控制桩更为精准,cpiii控制桩也是(x、y、z)坐标组成,设站操作为全站仪测量前的通用操作。
[0057]
具体地,s2包括以下步骤:
[0058]
s21,将待测区段cpiii及悬挂点的坐标导入全站仪;
[0059]
s22,严格按照全站仪cpiii设站要求设站;
[0060]
s23,调整全站仪放样模式为跟踪测量、免棱镜模式,调出悬挂点,开始对悬挂点进行放样,采用带伺服马达的全站仪自动寻得悬挂点大致位置,人工精调后,标记人员根据全站仪激光指示点进行标记,记为标记点,同时按接触网测量要求书写悬挂点号及拉出值,记录人员记录此时全站仪测得的悬挂点高程h;
[0061]
s24,手动向下旋转全站仪(水平不可旋转),将全站仪的指示激光调整至标记点正下方的盾构壁上,精调测量参数,使测量点的坐标与悬挂点的坐标一致,标记人员将200型电子水平尺中心对准激光指示点,测量角度,记录人员记录测量角度α。
[0062]
本实施例中,s23中,悬挂点的放样原则上只能在全站仪设站所用两对cpiii控制桩内,不得超范围放样;新设站放样前需对上一站所放样最近一个悬挂点进行复测,做好两站间的交叉校核,以确保测量的准确性;记录人员需兼测量监护员,观察及监督标记人员正确操作、放样工作;
[0063]
s3,采用悬挂点高程h和测量角度α进行全参数计算,得到吊柱2长度、吊柱2安装整正角度、吊柱2生产角度、悬臂在吊柱2上的安装高度;为吊柱2订货,现场安装整正、悬臂安装提供数据支撑。计算完成后由技术人员核定各项参数。
[0064]
具体地,吊柱2长度h为:
[0065]
h=(h-h0)
÷
cos[arcsin(h
超
÷
1435)]
±
p
×h超
÷
1435-h
轨
[0066]
其中,h为全站仪所测得的悬挂点高程,单位米;h0为悬挂点处轨面高程,单位米;h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米;p为吊柱2距线路中心的距
离,单位米;h
轨
为吊柱2底至轨面的距离,单位米;
[0067]
吊柱2安装整正角度θ为:
[0068]
θ=arcsin(h超
÷
1435)
÷
π
×
180
°
[0069]
其中,h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米。
[0070]
吊柱2生产角度β为:
[0071]
β=(90
°‑
α)
±
θ
[0072]
其中,α为悬挂点处的测量角度,单位度;θ为吊柱2安装整正角度,即柱体与顶板夹角,单位度;
[0073]
悬臂在吊柱2上的安装高度h
安
为:
[0074]h安
={(h-h0)
÷
cos[arcsin(h
超
÷
1435)]
±
p
×h超
÷
1435}
×
1000-h
接-692
[0075]
其中,h为全站仪所测得的悬挂点高程,单位米;h0为悬挂点处轨面高程,单位米;h
超
为悬挂点处外轨超高,单位毫米;1435为标准轨距,单位毫米;p为吊柱2距线路中心的距离,单位米;h
接
为接触网导高,单位毫米,本实施例中接触网导高为5300毫米;h1为根据设计图主要包括滑槽12厚度、吊柱顶板11厚度、接触线14距安装底座上抱箍12的距离之和,单位毫米,本实施例中h1为692毫米。
[0076]
本实施例还包括s4,物资订货及施工,具体包括以下步骤:
[0077]
s41,吊柱2安装前需核对编号,确保与悬挂点一一对应;
[0078]
s42,由于测量、计算、制造等误差,吊柱2安装后需用垫片进行整正,以消除前置工序的累计误差,提高安装质量及精度;
[0079]
s43,整正所采用电子水平尺需每日进行简单校正,严格按照施工表中的吊柱2安装整正角度进行吊柱2整正施工;
[0080]
s44,根据施工表确定悬臂安装高度,但受汇流排及悬臂自身重量影响,整体会产生挠度,为提高安装精度及方便后期调整,技术探索的安装经验为:将悬臂向上安装20mm。
[0081]
本实施例的实施流程为:坐标计算
→
测量放样及复核
→
全参数计算
→
物资订货及施工。
[0082]
本实施例根据接触网平面布置图中悬挂点里程(拉出值)计算对应坐标,通过全站仪放样,并记录对应点的高程,减去相应轨面高程,再根据轨面超高算得悬挂点净空高,从而得到锚栓(吊柱2)长度,再用角度尺测得悬挂点吊柱2生产角度。
[0083]
本实施例以全站仪、角度尺作为主要测量设备,以高精度的cpiii为控制桩,采用该工法进行测量施工,满足高速地铁高精度要求,可广泛运用于地铁接触网无轨测量施工。
[0084]
本实施例通过理论计算悬挂点坐标,采用全站仪直接放样定位,可满足不同隧道断面、不同速度等级接触网无轨测量施工需求。本实施例采用大地坐标直接定位,可进行直线及曲线的高精度定位测量,同时还可测定和计算吊柱2长度、顶板角度、吊柱2安装整正角度及悬臂在吊柱2上的安装高度,实现了全参数无轨测量及精准装配施工。本实施例的地铁接触网全参数无轨测量施工方法,大大降低了工程工期风险。通过本实施例的运用,填补了国内无轨全参数测量的空白,特别是曲线区段测不准的难题得以根本解决。采用cpiii为测量控制网,测量精度大大提高。本实施例为非轨行区测量及施工,施工安全系数大大提高,实现了非交叉作业,优化了施工作业环境。通过本实施例的运用,可以完全“摆脱”轨道施工制约,实现了均衡施工,可优化物资库存,合理劳动力部署,不窝工、不抢工,提高了经济效
益。本实施例无轨测量一次放样定位悬挂点位置,减少测量人员工作量,避免测量累计误差。本实施例为吊柱2订货,现场安装整正、悬臂安装提供数据支撑,减少技术人员数据处理工作量,保证数据准确性,保证安装精度,减少后期调整,提高施工功效。本实施例为全参数无轨测量,能保证订货吊柱2各尺寸的准确性,现场不二次切割加工,不浪费材料。本实施例可满足不同隧道断面、不同速度等级接触网无轨测量施工需求,可满足高速地铁接触网吊柱2安装方式悬挂、也可满足一般地铁接触网锚栓安装方式悬挂,一般地铁接触网锚栓安装方式悬挂时,将本实施例中的吊柱2替换为锚栓。
[0085]
本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。