1.本发明涉及地铁轨道检测技术设备领域,具体说是一种适用于地铁工字梁轨道的巡检机器人。
背景技术:
2.现有技术中,为了增加安全系数,需要定期对地铁轨道进行巡检,现在多数通过人工进行检查,人工巡检较为浪费精力,而且根本无法对轨道内部的情况进行检查,因此,现有技术中会使用巡检机器人对轨道进行检测。
3.例如:公开号为cn 111559395 a的专利文件中就公开了“一种地铁轨道专用巡检小车及控制方法”,该技术方案中是设置一个小车,该小车具备自动行走和检测功能,可以在轨道附近行走,对轨道进行拍摄、检测等,该专利文件中技术方案还是较为简单的,仅是通过摄像等技术进行检测。可以说检测效果不是很好。
4.并且现有技术中多数的地铁轨道都是设置成工字梁的结构,而上述技术方案并不适合用于工字梁的轨道,在该轨道上并不方便行走;而cn 208872301 u的专利文件中公开了“一种单轨式地铁隧道安全巡检机器人”,该技术方案就是针对工字梁的地铁轨道进行设置的巡检机器人。
5.该技术方案中是通过设置电动伺服轮组和巡检轨道滑动连接,将四个电动伺服轮设置在工字梁的中间竖梁的位置,两侧的电动伺服轮在两侧将中间竖梁夹紧,通过驱动机构带动电动伺服轮在中间竖梁上移动,同时也是采用摄像装置采集图像进行检测。
6.但是对于工字梁的轨道来说,工字梁最容易发生问题的地方就是工字梁的中间的竖梁位置,该位置既要承受较大的压力,厚度又设置的较小,因此在巡检的时候,该位置应该着重巡检检查,而上述技术方案中是将电动伺服轮设置在中间竖梁上的,遮盖了该位置,导致无法对该位置进行有效的检测,并且现有技术中不能直接进行探伤检测,而是通过摄像检测,不能较为有效的检测工字梁的内部情况。
7.为了解决上述问题,亟需一种可以对工字梁轨道中间数量进行有效检测的巡检机器人。
技术实现要素:
8.本发明的目的是针对现有技术存在的不足,提供一种适用于地铁工字梁轨道的巡检机器人;其技术方案如下:一种适用于地铁工字梁轨道的巡检机器人,包括两个工字梁轨道,该工字梁轨道包括上端横梁、下端横梁以及中间竖梁;还包括中间壳体以及设置在中间壳体两侧与中间壳体安装成一体的侧向壳体,两侧的侧向壳体分别设置在两个工字梁轨道的上方,且每一侧向壳体的两端还均设置有一块移动调节板,且每一移动调节板上均安装有一排位置对应的驱动电机,并且所述侧向壳体的下端面还设置有与驱动电机位置对应的限位槽,所述的驱动电机竖向设置,驱动电机的驱动杆向下穿过限位槽伸出到侧向壳体的下方的,且每一
驱动杆的端部均安装有竖向设置的驱动轮,同一侧向壳体内两侧的驱动轮相应卡装在工字梁轨道上端横梁的两侧,且同一侧向壳体内两侧的移动调节板之间还安装有拉紧弹簧,在拉紧弹簧的作用下,两侧的驱动轮相应夹紧工字梁轨道的上端横梁的两侧,并且在驱动电机的带动下相应移动。
9.所述的中间壳体设置在两个工字梁轨道之间,该中间壳体内设置有电源装置、通信装置以及控制装置;且该中间壳体的底部还安装有一升降装置,该升降装置的升降杆向下伸出,且杆端还安装有升降壳体,该升降壳体横向设置,该升降壳体的两侧端分别安装有摄像装置、照明装置以及超声波探伤装置,且两侧的超声波探伤装置的探头方向均对准工字梁轨道的中间竖梁。
10.进一步地,所述的升降壳体内还安装有两个电推动装置,两侧的超声波探伤装置分别对应安装在电推动装置上,可在电推动装置的作用下相应调节两侧超声波探伤装置的位置,而所述的摄像装置和照明装置为固定安装。
11.进一步地,每一驱动轮的下端部还均设置有可拆卸的伞状限位器;所述驱动轮的下端部设置有向内凹陷的螺纹凹槽,而伞状限位器的端部则相应设置有外螺纹,该伞状限位器通过设置的螺纹结构可拆卸安装。
12.进一步地,同一侧向壳体内左右两侧的移动调节板的对应端面还设置有竖向安装板,所述的拉紧弹簧相应安装在这两个竖向安装板内。
13.进一步地,所述的移动调节板的下端面还设置有t字形的限位块,该限位块相应嵌装在限位槽中,相应现在移动调节板的移动。
14.进一步地,所述的侧向壳体的下端面还设置有滚轮,所述滚轮24的设置位置与工字梁轨道的上端横梁1的上端面相对应。
15.有益效果:本发明具有以下有益效果:(1)本发明中的驱动轮对应安装在工字梁轨道的上端横梁的两侧,不是直接设置在中间竖梁的位置处,因此不会影响超声波探伤装置对中间竖梁的探伤,而且驱动轮通过设置的拉紧弹簧可以自适应的夹紧上端横梁,可以有效的且较为顺畅的在工字梁轨道上移动;(2)本发明中的中间壳体上安装有升降装置,可通过升降装置安装升降壳体,而该升降壳体内安装有超声波探伤装置,超声波探伤装置两侧分别安装一个,分别对准两侧的中间竖梁,可以无障碍的对中间竖梁进行探伤检测,而且上下位置可以相应调节;(3)本发明中升降壳体的内部还安装有电推动装置,通过电推动装置对两侧的超声波探伤装置进行推动,可以调节横向的位置,既可以贴紧在中间竖梁上进行探伤,也可以直接发射超声波进行无接触探伤,精度相应提升;(4)本发明中每一驱动轮的下端部还设置有可拆卸的伞状限位器,该伞状限位器可以稳定驱动轮的位置,伞状限位器安装后,可以卡在上端横梁与中间竖梁的连接部,从而稳定驱动轮,驱动轮在行走的时候,不会上移,更加的顺畅稳定。
附图说明
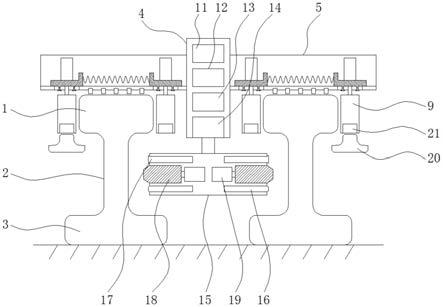
16.图1为本发明结构图;图2为本发明单轨道安装示意图。
具体实施方式
17.下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
18.如图1和图2所示,一种适用于地铁工字梁轨道的巡检机器人,包括两个工字梁轨道,该工字梁轨道包括上端横梁1、下端横梁2以及中间竖梁3;还包括中间壳体4以及设置在中间壳体4两侧与中间壳体4安装成一体的侧向壳体5,两侧的侧向壳体5分别设置在两个工字梁轨道的上方,且每一侧向壳体5的两端还均设置有一块移动调节板6,且每一移动调节板6上均安装有一排位置对应的驱动电机7,并且侧向壳体5的下端面还设置有与驱动电机7位置对应的限位槽8,驱动电机7竖向设置,驱动电机7的驱动杆向下穿过限位槽8伸出到侧向壳体5的下方的,且每一驱动杆的端部均安装有竖向设置的驱动轮9,同一侧向壳体5内两侧的驱动轮9相应卡装在工字梁轨道上端横梁1的两侧,且同一侧向壳体5内两侧的移动调节板6之间还安装有拉紧弹簧10,在拉紧弹簧10的作用下,两侧的驱动轮9相应夹紧工字梁轨道的上端横梁1的两侧,并且在驱动电机7的带动下相应移动。
19.本发明的巡检机器人总体包括三个部分,包括中间用于安装检测组件的中间壳体以及两侧用于安装驱动机构的侧向壳体;两侧的侧向壳体的内部是安装有移动调节板,移动调节板可以设置为长条形的,从而可以在移动调节板上安装一排的驱动电机,在侧向壳体的下端面又设置限位槽,这样驱动电机竖向设置,驱动杆就可以从限位槽伸出,并且安装驱动轮,驱动轮的设置位置是与工字梁轨道的上端横梁的位置是对应的,正好可以卡在上端横梁的两侧,卡住的力来自于移动调节板上安装的拉紧弹簧;两侧的侧向壳体内部的四组驱动轮配合就可以相应将两个工字梁轨道卡住,之后在驱动电机的带动下,就可以相应移动了,本发明中驱动轮主要是安装在工字梁轨道的上端横梁处,因此不会影响中间竖梁的检测。
20.中间壳体4设置在两个工字梁轨道之间,该中间壳体4内设置有电源装置11、通信装置12以及控制装置13;且该中间壳体4的底部还安装有一升降装置14,该升降装置14的升降杆向下伸出,且杆端还安装有升降壳体15,该升降壳体15横向设置,该升降壳体15的两侧端分别安装有摄像装置16、照明装置17以及超声波探伤装置18,且两侧的超声波探伤装置18的探头方向均对准工字梁轨道的中间竖梁3。
21.本发明中间壳体的内部主要是为了安装巡检用的检测装置,中间壳体内部首选需要安装配备的控制装置、电源装置以及通信装置等;而实际上用于检测的是安装于升降壳体内部的超声波探伤装置;中间壳体的底部安装升降装置,而升降壳体通过升降装置安装后,可以相应调节高度,调节超声波探伤装置的位置,摄像装置和照明装置,可以配合摄像以及照明,超声波探伤装置的位置与两个工字梁轨道的中间竖梁的位置是对应的,因此,可以直接通过超声波探伤装置对中间竖梁进行探伤。
22.升降壳体15内还安装有两个电推动装置19,两侧的超声波探伤装置18分别对应安装在电推动装置19上,可在电推动装置19的作用下相应调节两侧超声波探伤装置18的位置,而摄像装置16和照明装置17为固定安装。
23.现有技术中的超声波探伤装置通常分为两种,无接触式结构和接触式结构,无接触式的探伤装置只需要对准所要检测的物质,通过超声波的发射和接收来探测工字梁轨道的内部损伤;而接触式结构需要将探头按压在工字梁轨道的中间竖梁上的,而本装置通过
设置电推动装置,可以调节超声波探伤装置的位置,使其探头按压在中间竖梁上,从而增加探伤的精度。
24.每一驱动轮9的下端部还均设置有可拆卸的伞状限位器20;驱动轮9的下端部设置有向内凹陷的螺纹凹槽21,而伞状限位器20的端部则相应设置有外螺纹,该伞状限位器20通过设置的螺纹结构可拆卸安装。
25.本发明中,主要是通过驱动轮来夹紧固定住工字梁轨道的上端横梁两侧,但是为了增加稳定型,并且有的工字梁的上端横梁长度是较短的,因此本装置在驱动轮的下端部设置一个可拆卸的伞状限位器,伞状限位器整体呈伞状结构,通常上端横梁与中间竖梁之间会设置成倒圆形状,本发明的伞状限位器与上端横梁和中间竖梁的连接部的形状相适配,安装伞状限位器后,可相应限制在该位置处,稳定驱动轮的位置,伞状限位器本身是可以拆卸和更换的,可以根据具体的工字梁轨道的大小进行设计和更换,增加整体结构的稳定性。
26.同一侧向壳体5内左右两侧的移动调节板6的对应端面还设置有竖向安装板22,拉紧弹簧10相应安装在这两个竖向安装板22内;移动调节板6的下端面还设置有t字形的限位块23,该限位块23相应嵌装在限位槽8中,相应现在移动调节板6的移动;侧向壳体5的下端面还设置有滚轮24,滚轮24的设置位置与工字梁轨道的上端横梁1的上端面相对应。
27.为了使中间的拉紧弹簧能够更好的安装,可以在移动调节板的对应端面设置竖向安装板,增加安装空间,从而方便安装;移动调节板下端的限位块是可以卡装在限位槽中的,保证移动调节板可以左右移动。设置的滚轮也是可以相应增加侧向壳体的移动顺畅度。
28.上述具体实施方式只是本发明的一个优选实施例,并不是用来限制本发明的实施与权利要求范围的,凡依据本发明申请专利保护范围内容做出的等效变化和修饰,均应包括于本发明专利申请范围内。