1.本实用新型涉及纯电动摆渡车技术领域,具体涉及一种四轮无人驾驶纯电动摆渡车。
背景技术:
2.摆渡车,一种短途交通工具。“摆渡车”一词最早起源于飞机场,是连接机场内候机厅和远机位飞机的交通工具。机场飞机数量多,而机位少,建设一个机位所需要的资金大,故有多数的飞机停留在了远机位,需要通过摆渡车运送乘客。
3.后来摆渡车这一称呼引申到城市短途交通接驳、工业生产设备方面。根据用途不同主要分为:机场摆渡车,城市摆渡车,隧道窑摆渡车(工业生产),dbd摆渡车(工业生产)等。在现有技术中,摆渡车不具备自动驾驶功能。
技术实现要素:
4.针对现有技术的不足,本实用新型公开一种四轮无人驾驶纯电动摆渡车,能够解决现有技术中摆渡车不具备自动驾驶功能的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:
6.四轮无人驾驶纯电动摆渡车,包括
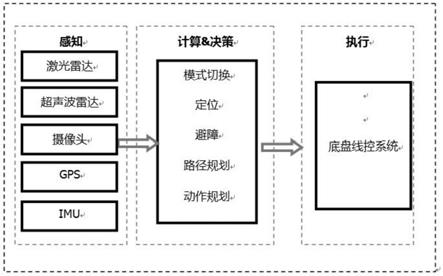
7.感知模块,用于实时获取车辆的位置和姿态数据、进行障碍物识别以及对红绿灯进行识别,所述感知模块包括激光雷达单元、超声波雷达单元、摄像头单元、gps单元和imu单元;
8.计算决策模块,用于进行实时动态路径规划并将具体操作转换为控制指令,所述计算决策模块通讯连接所述感知模块,所述计算决策模块包括模式切换单元、定位单元、避障单元、路径规划单元和动作规划单元;
9.执行模块,用于将所述计算决策模块生成的控制指令转换为线控底盘的操作流,所述执行模块通讯连接所述计算决策模块,所述执行模块包括底盘线控系统。
10.优选的技术方案,还包括上装总成,所述上装总成包括内饰、无人驾驶识别系统及车身附件。通过上装总成对无人驾驶识别系统进行安装,有利于保持无人驾驶识别系统的识别范围和识别效果。
11.优选的技术方案,所述激光雷达单元、所述超声波雷达单元、所述摄像头单元、所述gps单元和所述imu单元位于所述上装总成设置。通过在上装总成安装的感知模块,对车辆的位置、姿态、障碍物以及红绿灯均具有较好的获取能力。
12.优选的技术方案,还包括底盘总成,所述底盘总成包括底盘本体、用于执行转向操作的转向系统、用于执行驱动操作的驱动系统、用于执行制动操作的制动系统、电气系统和无人驾驶底层控制系统。通过底盘总成对无人驾驶底层控制系统进行安装,有利于保持无人驾驶底层控制系统的控制速度和控制效果。
13.优选的技术方案,所述模式切换单元、所述定位单元、所述避障单元、所述路径规
划单元和所述动作规划单元位于所述底盘总成设置。通过在底盘总成安装的计算决策模块,对实时动态路径规划以及控制指令的传输具有较高的速度,可以大幅减少四轮无人驾驶纯电动摆渡车的反应时间.
14.优选的技术方案,所述底盘线控系统位于所述底盘总成设置。通过在底盘总成安装的底盘线控系统可以进一步的减少四轮无人驾驶纯电动摆渡车的反应时间.
15.本实用新型公开一种四轮无人驾驶纯电动摆渡车,具有以下优点:
16.通过设置的感知模块、计算决策模块和执行模块,可以实时获取车辆的位置和姿态数据、进行障碍物识别以及对红绿灯进行识别,通过对识别得到的数据进行处理,进行实时动态路径规划并将具体操作转换为控制指令,再配合执行模块的操作,能够实现遥控驾驶模式、无人驾驶模式和远程驾驶模式的三种驾驶模式,极大的提升了四轮无人驾驶纯电动摆渡车的灵活驾驶能力,从而在具备自动驾驶的同时通过不同的驾驶模式的选择适用于不同的驾驶环境。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
18.显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本实用新型实施例的结构框图;
20.图2是本实用新型实施例的结构示意图;
21.图3是本实用新型实施例中底盘总成在的结构示意图。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
23.基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.实施例1
25.如图1所示,本实用新型实施例所述包括感知模块,用于实时获取车辆的位置和姿态数据、进行障碍物识别以及对红绿灯进行识别,所述感知模块包括激光雷达单元、超声波雷达单元、摄像头单元、gps单元和imu单元;
26.计算决策模块,用于进行实时动态路径规划并将具体操作转换为控制指令,所述计算决策模块通讯连接所述感知模块,所述计算决策模块包括模式切换单元、定位单元、避障单元、路径规划单元和动作规划单元;
27.执行模块,用于将所述计算决策模块生成的控制指令转换为线控底盘的操作流,所述执行模块通讯连接所述计算决策模块,所述执行模块包括底盘线控系统。
28.车辆具有三种驾驶模式:遥控驾驶模式、无人驾驶模式和远程驾驶模式。可通过操作面板上的开关进行驾驶模式切换。
29.遥控驾驶模式:计算决策模块将遥控器的控制信号转换为线控底盘的控制指令发送到执行模块,执行模块实现对车辆的横向和纵向控制。结合车载激光雷达和高精度组合导航系统可实现对目标区域的高精度地图的绘制。
30.无人驾驶模式:录入高精度地图后,可在操作面板上指定目的地,系统自动规划全局路径。通过车辆一键启动按键,切换到无人驾驶模式。感知模块对激光雷达、gps和imu等传感器进行数据融合,实时获取车辆的位置和姿态数据;通过激光雷达、超声波雷达进行障碍物识别;通过摄像头对红绿灯进行识别。计算决策模块根据感知系统的数据进行实时动态路径规划并将具体操作转换为控制指令下发到执行系统,以实现智能避障功能;执行模块将计算决策模块的控制指令转换为线控底盘的操作流,实现对车辆的横、纵向移动控制。
31.远程驾驶模式:通过模式切换按键系统可一键切换到远程驾驶模式,通过车载5g模块连接的远程驾驶模拟舱,实现车辆和模拟舱图像数据和控制指令的双向传输。计算和决策模块将模拟舱控制数据转换为控制指令下发到执行模块,执行模块将控制指令转换为线控底盘的操作流,实现对车辆的横、纵向移动控制。同时车辆将实时的摄像头数据传输到远程驾驶舱,进而实现远程驾驶。
32.实施例2
33.如图2和图3所示,本实用新型实施例所述四轮无人驾驶纯电动摆渡车,还包括上装总成,所述上装总成包括内饰、无人驾驶识别系统及车身附件。还包括底盘总成,所述底盘总成包括底盘本体、用于执行转向操作的转向系统、用于执行驱动操作的驱动系统、用于执行制动操作的制动系统、电气系统和无人驾驶底层控制系统。
34.启动车辆,工作人员先通过遥控控制车辆行走,主要进行扫描作业,通过无人驾驶的识别系统对周围环境进行扫描,结果反馈到后台,后台就将这些数据生成相应的三维地图,有了地图数据后就能在后台通过定位来自动规划路线,车辆接受到后台指令,就会沿着路线进行自动行驶,当途中遇到障碍物,会自动避让绕行,到终点后就会自动停止。其中,执行转向的操作是由转向系统来完成的,主要是由转向电机带动方向机进行转向;执行驱动的操作就是由驱动系统来完成,主要是由行走电机驱动后桥实现的;执行制动的操作是由制动系统来完成的,主要是通过电动推杆拉动刹车摇臂来推动制动油泵进行制动的。
35.其他未描述结构参照实施例1。
36.实施例3
37.如图1至图3所示,本实用新型实施例所述四轮无人驾驶纯电动摆渡车,所述激光雷达单元、所述超声波雷达单元、所述摄像头单元、所述gps单元和所述imu单元位于所述上装总成设置。
38.本实用新型实施例所述四轮无人驾驶纯电动摆渡车,所述模式切换单元、所述定位单元、所述避障单元、所述路径规划单元和所述动作规划单元位于所述底盘总成设置。
39.计算和决策模块通过对感知模块的传感器数据的融合计算,转换为决策数据。然后通过内部定位、避障、路径规划算法计算出对线控底盘的控制指令,实现红绿灯识别、自动避障,规划作业路线自动循迹,无人驾驶与遥控驾驶一键切换等。
40.本实用新型实施例所述四轮无人驾驶纯电动摆渡车,所述底盘线控系统位于所述底盘总成设置。底盘线控系统接收计算决策模块输出的控制指令转换为相应的动作,最终驱动车辆完成自动驾驶的任务。
41.其他未描述结构参照实施例1。
42.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
43.显然,本领域的技术人员应该明白,上述的本实用新型的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在存储装置中由计算装置来执行,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。这样,本发明不限制于任何特定的硬件和软件结合。
44.而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
45.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。