用于操作可马达调节的转向柱的方法以及用于机动车辆的可马达调节的转向柱
1.本发明涉及根据权利要求1的前序部分的用于操作可马达调节的转向柱的方法以及根据权利要求12的前序部分的用于机动车辆的可马达调节的转向柱。
2.可马达调节的转向柱包括支承单元和致动单元,该致动单元由支承单元支承,转向主轴可旋转地支承在致动单元中,并且该致动单元能够借助于至少一个调节驱动器相对于支承单元被调节,其中,可以在纵向方向和/或高度方向上进行调节。调节驱动器可以自锁,使得转向柱保持固定在设定位置中。调节驱动器包括主动地连接至主轴驱动器的电动马达,使得该调节驱动器将电动马达的转子轴的旋转运动转换为平移运动,并且该调节驱动器导致了致动单元相对于支承单元的调节。可电动调节的转向柱的电动马达的控制是借助于ecu和半导体开关来进行的。调节路径上的调节速度通过马达设计或者通过借助于ecu的控制来指定。
3.所使用的电动马达通常以在可听频率范围内产生噪音的转速操作。调节速度以及因此还有噪音改进也受到周期性频率调制的影响,所述周期性频率调制是由例如在调节驱动器的传动系中使用的部件的公差偏差以及其他外部影响所引起的。即使是2%至3%的频率调制也会被车辆乘员感知为干扰,并且留下提示制造质量欠佳的声学印象。
4.从ep 1 927 526 a1已知一种用于操作可电动调节的转向柱的方法,在该方法中,速度控制单元输出用于调节转向柱的位置的速度控制指令。基于速度控制指令和限定的传输函数,最优值控制模块确定实现目标速度所用的扭矩控制指令。此外,设置了干扰负载评估装置,该干扰负载评估装置对来自负载扭矩与扭矩控制指令之间的偏差的干扰负载进行确定,通过其对最优值控制模块的输出侧进行额外加载。
5.因此,ep 1 927 526 a1描述了基于评估的干扰负载添加具有干扰变量的调节速度的控制。该方法的缺点是控制器的复杂结构和产生的控制惯性。由于之前已知的控制,可以实现调节速度对一些外部参数比如电源电压、摩擦力、温度或重量的依赖的减少。然而,由于控制惯性,特别不可能的是抵消之前描述的调节驱动器的频率调制。
6.因此,本发明的目的是指定一种用于操作可马达调节的转向柱的方法和一种用于机动车辆的可马达调节的转向柱,该转向柱在转向柱调节期间具有改善的声学印象。
7.该目的是通过具有权利要求1的特征的用于操作可马达调节的转向柱的方法以及具有权利要求12的特征的可马达调节的转向柱来实现的。有利的进一步改进方案由相应的从属权利要求得到。
8.这产生了一种用于操作用于机动车辆的可马达调节的转向柱的方法,该可马达调节的转向柱具有支承单元和致动单元,该致动单元由支承单元支承,转向主轴可旋转地支承在该致动单元中,并且该致动单元能够借助于至少一个调节驱动器相对于支承单元在纵向和/或高度上调节,其中,调节驱动器由控制单元控制,并且基于来自传感器的测量数据,并且对由调节驱动器引起的调节速度进行确定。通过根据本发明的方法,还设置的是,控制单元在控制回路中基于能够指定的速度曲线与指定的调节速度之间的控制偏差以控制调节驱动器。
9.在本发明的上下文中,用于确定调节速度的传感器被理解为确定单元,该确定单元以任一方式对调节速度进行确定或判断。这可以通过对调节速度进行直接测量来直接完成、或者通过由其他确定值对调节速度进行间接计算或基于该值得出有关调节速度的结论。例如,基于主轴驱动的已知传动比,由电动马达的转速来确定调节速度。
10.优选地,致动单元能够相对于支承单元纵向地和/或沿高度方向调节。
11.通过基于作为输入变量的检测到的调节速度对速度进行控制,显著缩短了控制单元对变化的外部条件的反应时间。这使得可以修正受控系统中的不一致性、比如调节驱动器或者调节系统的不规则性。受控系统包括以下部分中的至少一者:转向柱的导引系统、与转向系连接的连接件和/或包括可调节马达和传动装置的调节驱动器。
12.对于控制器,优选地使用pi控制器和/或pid控制器。控制回路的控制参数可以是固定的。替代性地,控制参数也可以例如借助于路由识别来更新。
13.优选地,可马达调节的转向柱包括作为调节驱动器的电动马达,其中,特别优选地,为高度调节和纵向调节中的每一者设置了调节驱动器。优选地,控制应用于纵向调节和/或高度调节,其中,该调节是同时地和/或顺序地进行的。优选地,借助于脉冲调制(pwm)来控制电动马达。
14.优选地,速度曲线在调节期间与调节驱动器的恒定速度相对应。该速度曲线的选择进一步改善了转向柱的声学印象,因为不仅修正了频率调制,而且转向柱的基本频率基本保持相同。
15.替代性地,可以在调节期间反复确定可调节转向柱的位置,并且可以基于位置相关的速度特性指定调节驱动器的速度曲线。如果特别地用于高度调节的可马达调节的转向柱的调节系统包括用于将调节运动从调节驱动器传输至致动单元的杆系统,则调节驱动器的恒定调节速度可以导致致动单元的不断变化的调节速度。为了提高驾驶员的舒适性,可以使用位置相关的速度特性,这减少了由调节系统引起的致动单元调节速度中的位置相关的变化。特别地,位置相关的速度特性可以对致动单元相对于支承单元的基本恒定的调节速度进行编码。恒定的调节速度被理解为是指平均调节速度的
±
5%的最大偏差。
16.速度曲线优选地在调节起始时具有开始坡并且在调节结束时具有停止坡。由于平缓的启动和停止行为,可以减少调节系统中的负载峰值并且特别是减少卡嗒的噪音。开始坡是加速。开始坡优选地可以是线性的、或渐进的、或递减的。
17.在优选示例性实施方式中,设置了在调节期间对控制回路的至少一个操纵变量进行评估的评估单元以用于识别控制回路的控制部分中的不一致性。关于调节系统上的瞬时负载的信息可以由控制回路的操纵变量推导出来。
18.特别优选地,转向柱的位置是基于控制系统中所识别的不一致性来确定的。例如,尤其是在使用用于调节驱动器的动力传输的杆系统时,所需的操纵变量根据转向柱的位置而变化。通过对操纵变量进行评估,因此可以得出转向柱的位置。该评估还可以优选地被用于碰撞检测或磨损检测。优选地,评估单元设计成将评估结果传输至车载系统。例如,操纵变量可以是用于调节驱动器的电压设定点。碰撞被理解为是指与异物比如人的四肢的不希望的接触。
19.评估单元还可以对至少一个操纵变量进行阈值监测,并且如果超过阈值,则可以引起调节驱动器的关闭。通过切断调节驱动器,可以确保用于驱动器的有效防夹保护。
20.调节速度优选地通过由调节驱动器驱动的轴的转速来确定。特别地,可以直接在调节驱动器的输出轴处对转速进行检测。替代性地,也可以通过检测致动单元的运动来确定调节速度。调节速度可以由绝对位置或相对位置的检测得到。例如,可以使用磁性传感器或感应传感器作为传感器。
21.优选地,为了确定转速,设置了围绕轴沿周向方向分布的一个或更多个传感器单元,所述传感器单元中的每个传感器单元输出脉冲传感器信号,并且在每种情况下,速度是基于最后记录脉冲的传感器信号的周期持续时间来确定的。当使用多个传感器单元时,可以对速度进行特别准确的确定。轴每转一圈,调节速度被更新若干次。由于每个传感器单元设计成用于独立的速度测量,因此尽管如此所确定的调节速度与传感器单元的相对于彼此的定位公差无关。
22.在优选实施方式中,速度曲线指定有可听频率范围内的一个或更多个干扰频率。通过有意地将可听范围内的一个或更多个干扰频率应用于速度曲线,可以影响调节驱动器的噪音改进。该声音设计优化了调节系统的声学印象,并且给车辆乘员留下了特别良好的印象。
23.在装置方面,通过用于机动车辆的可马达调节的转向柱来实现目的,该转向柱具有支承单元和由支承单元支承的致动单元。转向柱的转向主轴可旋转地安装在致动单元中,并且致动单元能够借助于至少一个调节驱动器相对于支承单元调节。转向柱还包括用于控制调节驱动器的控制单元以及用于确定致动单元的调节速度的传感器。调节驱动器、传感器和控制单元集成到控制回路中,以用于基于能够指定的速度曲线与所确定的调节速度之间的控制偏差控制调节驱动器。转向柱可以特别地设计成用以实现上述方法。
24.可以在下面的描述中发现本发明的进一步实施方式。
25.下面基于在附图中表示的示例性实施方式对本发明进行更详细的解释。
26.图1示意性地示出了根据本发明的可马达调节的转向柱的立体图;
27.图2示意性地示出了根据来自不同观察角度的图1的根据本发明的转向柱的另一立体图;
28.图3示意性地示出了根据图1和图2的根据本发明的转向柱的控制单元的结构;
29.图4示意性地示出了根据图1和图2的根据本发明的转向柱的控制回路的框图。
30.在不同的附图中,相同的部分总是具有相同的附图标记,并且因此通常仅命名或者提及一次。
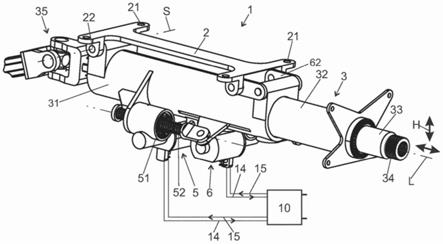
31.图1以从斜对的左上角至后端部的示意立体图示出了与未示出的车辆的行进方向有关的根据本发明的转向柱1,其中,在此未示出的方向盘被保持在操作区域中。图2以相反侧、即从右下角观察的视图示出了转向柱1。
32.转向柱1包括呈支架形式的支承单元2,该支承单元2具有安装孔21,以用于附接至未示出的车身。致动单元3通过护套单元31的插入由支承单元2保持,其中,致动单元3以可套叠伸缩的方式布置在护套单元31中。致动单元3包括护套管32和转向主轴33,该转向主轴33围绕纵向轴线l可旋转地支承在护套管32中。在转向主轴33的后端部处,形成有安装部段34,未示出的方向盘可以附接至该安装部段34。在前端部处,转向主轴33连接至万向节35的叉状部以便传输扭矩。
33.致动单元3能够借助于两个调节驱动器5、6相对于支承单元2、如由双箭头l和h所
指示的在纵向上和在高度方向上调节。为此目的,用于纵向调节的调节驱动器5经由传动装置联接至主轴螺母51。主轴螺母51与螺纹主轴52接合,该螺纹主轴52联接至护套管32,并且该螺纹主轴52在驱动主轴螺母51时使护套管32在纵向方向l上移位。
34.用于高度调节的调节驱动器6经由第二螺纹驱动器61致动可旋转的致动杆62,其中,致动杆62将护套单元31连接至支承单元2。当致动杆62被操作时,致动单元3因此相对于支承单元围绕由转动支承件22限定的水平转动轴线s转动,并且因此在高度方向上被调节。由于使用了用于力传输的杆系统,因此所产生的用于调节驱动器6的恒定驱动速度的致动单元31的调节速度取决于致动单元31的相应位置。
35.在图3中,示意性地示出了根据图1和图2的根据本发明的转向柱的控制单元10的结构。控制单元10包括用于控制调节驱动器5、6的mcu(微控制单元)16和mdu(马达驱动器单元)19。为了控制调节驱动器,mdu 19将指令值15输出至相应的调节驱动器5、6。借助于传感器8、即每个调节驱动器的至少一个传感器8确定由相应的调节驱动器5、6引起的调节速度,传感器8为此输出传感器信号14。在示出的示例性实施方式中,传感器8作为转子位置传感器布置在调节驱动器5、6内。然而,还可以设想的是,确定由调节驱动器5、6驱动的任一其他部件、特别是每个从动轴的调节速度9。同样,通过示例,在图3中可以设置的是,mdu19具有作为用于传感器信号14的输入的传感器接口。替代性地,传感器信号14也可以经由另一输入直接传输至mcu 16。
36.根据图3的示例性实施方式,mcu 16具有三个接口17:电源接口171、开关输入172和总线接口173。电源接口171经由线路滤波器18连接至线路电压181、例如车辆电气系统。线路滤波器18在电源接口171处提供干扰抑制和/或缓冲电压182,并且用于mdu 19。
37.开关输入172优选地连接至(未示出的)开关元件例如提供开关信号174的摇杆开关或操纵杆开关、按钮等。借助于开关元件,驾驶员可以实现致动单元在纵向方向和/或高度方向上的调节。
38.总线接口173用于经由信号线175将可调节转向柱连接至车辆总线例如can总线或者lin总线。通过连接至车辆总线,信息可以双向地交换。例如,在某些驾驶情况下,可以实现转向柱的自动调节。因此,例如,可以在切断点火时或者甚至在发生事故的情况下便于退出。此外,还可以设置的是,当车辆在自动驾驶模式下操作时,致动单元转移至完全缩回位置(收起位置)。此外,控制单元10的诊断信息可以经由总线接口173输出至车辆控制器或者存储在存储单元中。
39.图4示意性地示出了根据图1和图2的根据本发明的转向柱的控制回路的框图。在mcu 16中存储了速度曲线11,该速度曲线11根据开关信号174和/或经由信号线175接收的指令指定了作为参考变量111的速度设定值。在微分器164中,控制偏差13被确定为参考变量111与所测量的调节速度9之间的差值,并且被传递至控制器165。控制器165输出操纵变量166例如马达电压。操纵变量166被传递至mdu 19以用于确定pwm信号,并且用于借助于指令值15进行调节驱动器5的后续控制。在替代性实施方式中,可以在mcu 16内的单独处理步骤中进行pwm信号的确定。
40.如图4所示,可以设置评估单元12,该评估单元12在调节期间对控制回路7的操纵变量166进行评估,以识别受控系统中的不一致性。评估单元12可以具有将评估结果输出至总线接口173或者用于在速度曲线11中考虑的输出。例如,评估单元可以设计成基于受控系
统中的被识别的不一致性来确定转向柱1的位置。此外,评估单元12可以对操纵变量166进行阈值监测,并且如果超过阈值,则可以引起调节驱动器5的关闭。因此,安全功能比如碰撞检测还可以包括可以实施的防夹保护。
41.传感器8输出优选脉冲传感器信号14,该脉冲传感器信号14被提供给计时器161和速度计算模块163。计时器161设计成例如通过脉冲传感器信号的边缘检测来确定传感器信号14的周期持续时间。确定的周期持续时间以时间信号162的形式传输至速度计算模块163。该速度计算模块163根据传感器信号14由时间信号162和相关的位置变化来计算调节速度9,其中,调节速度9被传输至微分器164。计算出的调节速度9被另外地传输至mdu 19以用于确定pwm信号。
42.虽然在图4中参考了用于转向柱1的纵向调节的调节驱动器5作为示例,但是上述表述相应地应用至用于转向柱1的高度调节的调节驱动器6。
43.附图标记列表
[0044]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
转向柱
[0045]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支承单元
[0046]
21
ꢀꢀꢀꢀꢀꢀꢀꢀ
附接孔
[0047]
22
ꢀꢀꢀꢀꢀꢀꢀꢀ
转动支承件
[0048]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
致动单元
[0049]
31
ꢀꢀꢀꢀꢀꢀꢀꢀ
护套单元
[0050]
32
ꢀꢀꢀꢀꢀꢀꢀꢀ
护套管
[0051]
33
ꢀꢀꢀꢀꢀꢀꢀꢀ
转向主轴
[0052]
34
ꢀꢀꢀꢀꢀꢀꢀꢀ
安装部段
[0053]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
调节驱动器
[0054]
51
ꢀꢀꢀꢀꢀꢀꢀꢀ
主轴螺母
[0055]
52
ꢀꢀꢀꢀꢀꢀꢀꢀ
螺纹主轴
[0056]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
调节驱动器
[0057]
61
ꢀꢀꢀꢀꢀꢀꢀꢀ
螺纹驱动器
[0058]
62
ꢀꢀꢀꢀꢀꢀꢀꢀ
致动杆
[0059]7ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制回路
[0060]8ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器
[0061]9ꢀꢀꢀꢀꢀꢀꢀꢀ
调节速度
[0062]
10
ꢀꢀꢀꢀꢀꢀꢀ
控制单元
[0063]
11
ꢀꢀꢀꢀꢀꢀꢀ
速度曲线
[0064]
111
ꢀꢀꢀꢀꢀꢀ
参考变量
[0065]
12
ꢀꢀꢀꢀꢀꢀꢀ
评估单元
[0066]
13
ꢀꢀꢀꢀꢀꢀꢀ
控制偏差
[0067]
14
ꢀꢀꢀꢀꢀꢀꢀ
传感器信号
[0068]
15
ꢀꢀꢀꢀꢀꢀꢀ
指令值
[0069]
16
ꢀꢀꢀꢀꢀꢀꢀ
mcu
[0070]
161
ꢀꢀꢀꢀꢀꢀ
计时器
[0071]
162
ꢀꢀꢀꢀꢀꢀ
时间信号
[0072]
163
ꢀꢀꢀꢀꢀꢀ
速度计算模块
[0073]
164
ꢀꢀꢀꢀꢀꢀ
微分器
[0074]
165
ꢀꢀꢀꢀꢀꢀ
控制器
[0075]
166
ꢀꢀꢀꢀꢀꢀ
操纵变量
[0076]
17
ꢀꢀꢀꢀꢀꢀꢀ
接口
[0077]
171
ꢀꢀꢀꢀꢀꢀ
电源接口
[0078]
172
ꢀꢀꢀꢀꢀꢀ
开关输入
[0079]
173
ꢀꢀꢀꢀꢀꢀ
总线接口
[0080]
174
ꢀꢀꢀꢀꢀꢀ
开关信号
[0081]
175
ꢀꢀꢀꢀꢀꢀ
信号线
[0082]
18
ꢀꢀꢀꢀꢀꢀꢀ
线路滤波器
[0083]
181
ꢀꢀꢀꢀꢀꢀ
线路电压
[0084]
182
ꢀꢀꢀꢀꢀꢀ
干扰抑制电压
[0085]
19
ꢀꢀꢀꢀꢀꢀꢀ
mdu
[0086]sꢀꢀꢀꢀꢀꢀꢀꢀ
转动轴线
[0087]
l
ꢀꢀꢀꢀꢀꢀꢀ
纵向方向
[0088]hꢀꢀꢀꢀꢀꢀꢀ
高度方向