1.本发明实施例涉及车辆踏板模拟的技术领域,尤其涉及一种电磁制动踏板模拟器和车辆。
背景技术:
2.随着汽车产业不断向自动化电动化发展,线控制动系统的重要程度不断凸显。在线控制动系统中,制动踏板与制动执行机构之间的控制过程不断的向线性解耦的方向发展。目前,电子制动踏板逐渐取代传统的机械踏板,通过电子制动踏板的踏板模拟器为驾驶员提供可靠充足的模拟力,为驾驶员提供脚步的支撑与反馈。在电子制动踏板的踏板模拟器为驾驶员提供模拟力时,踏板模拟器需要消耗一定的电能,从而增加了车辆的电耗。
技术实现要素:
3.本发明提供一种电磁制动踏板模拟器和车辆,以减小电磁制动踏板模拟器的电耗,从而减小车辆的电耗。
4.第一方面,本发明实施例提供了一种电磁制动踏板模拟器,包括壳体、电磁体、永磁体、力转换机构和踏板;
5.所述电磁体和所述永磁体设置于所述壳体内,所述电磁体固定于所述壳体内,所述永磁体与所述电磁体相对设置,所述电磁体的磁性方向与所述永磁体的磁性方向互斥;所述永磁体与所述力转换机构的输出端连接,所述力转换机构的输入端与所述踏板连接,所述力转换机构用于根据所述踏板的输入力转换成输出力;所述永磁体根据所述输出力运动;其中,所述输出力小于所述输入力。
6.可选地,所述力转换机构包括杠杆;
7.所述杠杆的动力臂与所述踏板连接,所述杠杆的阻力臂与所述永磁体连接,所述动力臂的长度小于所述阻力臂的长度。
8.可选地,所述杠杆还包括第一铰链结构和支撑结构;
9.所述动力臂和所述阻力臂通过所述第一铰链结构连接,所述支撑结构与所述第一铰链结构固定连接,所述支撑结构用于固定所述第一铰链结构。
10.可选地,所述电磁体和所述永磁体在所述壳体内沿第一方向排列设置,所述永磁体沿所述第一方向和所述第一方向的反方向运动。
11.可选地,电磁制动踏板模拟器还包括活塞体;所述活塞体设置于所述壳体内,所述永磁体在所述活塞体中;所述活塞体用于根据所述输出力运动,所述永磁体与所述活塞体联动。
12.可选地,所述活塞体包括凹槽,所述永磁体固定于所述凹槽内;
13.所述凹槽包括槽口,所述槽口设置于所述活塞体靠近于所述电磁体的一侧。
14.可选地,沿第二方向,所述槽口的宽度小于所述永磁体的宽度;其中,所述第二方向与第一方向相交,所述第一方向为所述电磁体和所述永磁体的排列方向。
15.可选地,电磁制动踏板模拟器还包括连杆、第二铰链结构和第三铰链结构;
16.所述连杆的第一端通过所述第二铰链结构与所述活塞体连接,所述连杆的第二端通过所述第三铰链结构与所述力转换机构的输出端连接,所述连杆的延伸方向与第一方向相同;其中,所述第一方向为所述电磁体和所述永磁体的排列方向。
17.可选地,电磁制动踏板模拟器还包括电流调节器,所述电磁体包括线圈和铁芯,所述线圈绕设在所述铁芯上;
18.所述电流调节器的输出端与所述线圈连接,所述电流调节器用于调节所述线圈上的电流。
19.第二方面,本发明实施例还提供了一种车辆,包括第一方面提供的电磁制动踏板模拟器。
20.本发明实施例的技术方案,通过设置力转换机构的输出力小于输入力,即踏板力通过力转换机构进行转换后输出的输出力小于踏板力,在踏板力不变,且踏板的模拟效果相同的情况下,可以使输出力对应的互斥力需求小于踏板力对应的互斥力需求,进而使得输出力对应的电磁体上的电流小于踏板力对应的电磁铁上的电流,从而可以减小电磁制动踏板模拟器对电能的需求,减少了电磁制动踏板模拟器的电耗,进而减少了车辆的电耗。
附图说明
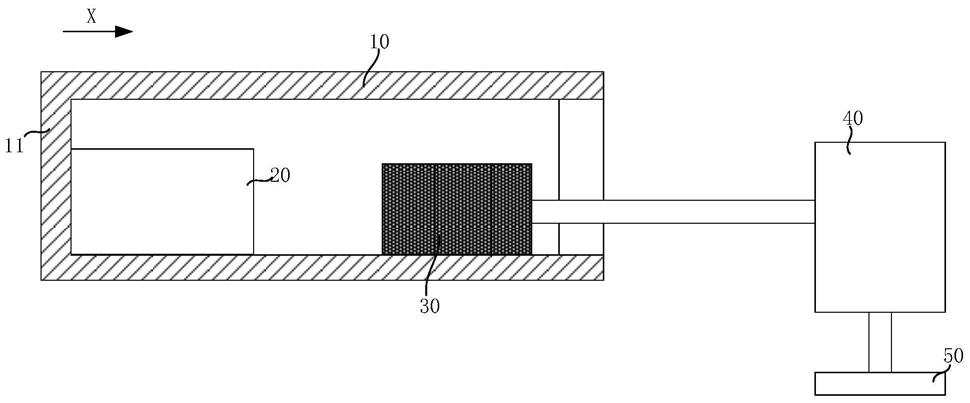
21.图1为本发明实施例提供的一种电磁制动踏板模拟器的结构示意图;
22.图2为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图;
23.图3为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图;
24.图4为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图;
25.图5为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图;
26.图6为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图;
27.图7为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。
具体实施方式
28.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
29.图1为本发明实施例提供的一种电磁制动踏板模拟器的结构示意图。如图1所示,该电磁制动踏板模拟器包括壳体10、电磁体20、永磁体30、力转换机构40和踏板50;电磁体20和永磁体30设置于壳体10内,电磁体20固定于壳体10内,永磁体30与电磁体20相对设置,电磁体20的磁性方向与永磁体30的磁性方向互斥;永磁体30与力转换机构40的输出端连接,力转换机构40的输入端与踏板50连接,力转换机构40用于根据踏板50的输入力转换为输出力;永磁体30根据输出力运动;其中,输出力小于输入力。
30.具体地,壳体10为中空结构,用于放置电磁体20和永磁体30。电磁体20具有通电后产生电磁力的特点。示例性地,电磁体20可以包括线圈和铁芯,线圈缠绕在铁芯上,在线圈通电后,电磁体20可以产生电磁力。其中,线圈缠绕铁芯时的缠绕方向,以及流过线圈的电流方向可以影响电磁体20的磁性方向。电磁体20固定于壳体10内,示例性地,电磁体20可以
与壳体10的第一侧面11相对固定,此时永磁体30可以设置于电磁体20远离壳体10的第一侧面11的一侧,使电磁体20和永磁体30排列设置,形成相对的位置关系。当电磁体20的磁性方向与永磁体30的磁性方向互斥时,在电磁体20通电产生电磁力后,永磁体30与电磁体20之间具有互斥力。力转换机构40的输入端与踏板50连接,当驾驶员踩踏踏板50时,驾驶员踩踏踏板50的踏板力通过力转换机构40进行转换形成输出力,该输出力传输至永磁体30,永磁体30在输出力的作用下向靠近电磁体20的方向运动。在永磁体30靠近电磁体20时,永磁体30与电磁体20之间的互斥力逐渐增大。该互斥力作用于永磁体30上,并通过力转换机构40反馈至踏板50,从而可以为驾驶员提供踏板的踩踏感觉,实现踏板的模拟效果。
31.另外,不同的输出力作用于永磁体30上时,在踏板的模拟效果不变的情况下,电磁体20与永磁体30之间的互斥力与输出力呈正相关,而电磁体20与永磁体30之间的互斥力与电磁体20上的电流呈正相关。力转换机构40的输出力小于输入力,为踏板力通过力转换机构40进行转换后的输出力小于踏板力。在踏板力不变,且踏板的模拟效果相同的情况下,通过设置输出力小于踏板力,使得输出力对应的互斥力需求小于踏板力对应的互斥力需求,进而使得输出力对应的电磁体20上的电流小于踏板力对应的电磁铁20上的电流,从而可以减小电磁制动踏板模拟器对电能的需求,减少了电磁制动踏板模拟器的电耗,进而减少了车辆的电耗。
32.图2为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图2所示,力转换机构40包括杠杆;杠杆的动力臂41与踏板50连接,杠杆的阻力臂42与永磁体30连接,动力臂41的长度小于阻力臂42的长度。
33.具体地,力转换机构40可以包括踏板臂,并分成两部分用于形成杠杆。杠杆包括动力臂41和阻力臂42,踏板臂的两部分可以分别为动力臂41和阻力臂42。动力臂41与输入力的乘积与阻力臂42与输出力的乘积相等,满足扭矩平衡原理。输入力为驾驶员踩踏踏板50的踏板力,由此输出力为fout=fi*l1/l2,其中,l1为动力臂41的长度,l2为阻力臂42的长度,fi为踏板50输入的踏板力,fout为输出力。当动力臂41的长度小于阻力臂42的长度时,可以使得输出力小于踏板力,使得杠杆为增力机构,从而可以减小电磁体20与永磁体30之间的互斥力需求,进而可以减小电磁体20上的电流,减小了电磁制动踏板模拟器对电能的需求,进而减少了电磁制动踏板模拟器的电耗,减少了车辆的电耗。
34.需要说明的是,可以根据需要调节动力臂41和阻力臂42的长度比例,从而可以根据需调节输出力,进而调节电磁体20对电流的需求,此处不做限定。另外,输入力与动力臂41垂直,当踏板臂的一部分与输入力垂直时,动力臂41与踏板臂该部分可以等效。当踏板臂的一部分与输入力不垂直时,动力臂41与踏板臂的该部分不等效,此时动力臂41的长度为踏板臂的一部分沿输入力垂直方向的长度分量。同理,输出力与阻力臂42垂直。当踏板臂的另一部分与输出力垂直时,阻力臂42与踏板臂另一部分可以等效。当踏板臂的另一部分与输出力不垂直时,阻力臂42与踏板臂另一部分不等效,此时阻力臂42的长度为踏板臂另一部分沿输出力垂直方向的长度分量。
35.继续参考图2,杠杆还包括第一铰链结构43和支撑结构44;动力臂41和阻力臂42通过第一铰链结构43连接,支撑结构44与第一铰链结构43固定连接,支撑结构44用于固定第一铰链结构43。
36.具体地,支撑结构44可以为支架,第一铰链结构43可以为球形铰链。支撑结构44固
定第一铰链结构443,形成杠杆的支点。动力臂41和阻力臂42通过第一铰链结构43连接,从而通过动力臂41、阻力臂42第一铰链结构43和支撑结构44形成杠杆。通过设置动力臂41的长度小于阻力臂42的长度,并根据杠杆作用,可以使得输出力小于输入力。
37.继续参考图2,电磁体20和永磁体30在壳体10内沿第一方向x排列设置,永磁体30沿第一方向x和第一方向x的反方向运动。
38.具体地,电磁体20和永磁体30沿第一方向x排列设置时,电磁体20和永磁体30沿第一方向x相对设置,此时电磁体20和永磁体30之间的互斥力主要分布于第一方向x和第一方向x的反方向。当力转换机构40的输出力大于电磁体20和永磁体30之间的互斥力时,永磁体30在输出力的作用下向第一方向x的反方向运动,当力转换机构40的输出力小于电磁体20和永磁体30之间的互斥力时,永磁体30在输出力的作用下向第一方向x运动。由此可以使得永磁体30根据力转换机构40的输出力运动。
39.图3为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图3所示,电磁制动踏板模拟器还包括活塞体60;活塞体60设置于壳体10内,永磁体30固定在活塞体60中;活塞体60用于根据输出力运动,永磁体30与活塞体60联动。
40.具体地,永磁体30固定于活塞体60内,使得永磁体30可以通过活塞体60与力转换机构40连接,活塞体60具有铰链连接作用。踏板力通过力转换机构40转换为输出力后作用在活塞体60上,活塞体60沿第一方向x的反方向运动,联动永磁体30运动,使得永磁体30靠近电磁体20,此时永磁体30与电磁体20之间的互斥力增加,并作用于永磁体30上,并通过永磁体30传输至活塞体60,然后通过活塞体60通过力转换机构40反馈至踏板50,从而可以为驾驶员提供踏板的踩踏感觉,实现踏板的模拟效果。当踏板力减小后,踏板力通过力转换机构40转换的输出力减小,活塞体60在输出力和互斥力的作用下沿第一方向x运动,联动永磁体30运动,使得永磁体30远离电磁体20,并通过永磁体30传输至活塞体60,然后通过活塞体60通过力转换机构40反馈至踏板50,从而可以为驾驶员提供松开踏板的感觉。在活塞体60沿第一方向x和第一方向x的反方向运动时,活塞体60与壳体10的内表面接触,活塞体60的铰链连接作用可以使得永磁体30在第一方向x和第一方向x的反方向的受力均匀,改善了永磁体30在第一方向x和第一方向x的反方向上运动时受力不均导致错位的现象。
41.图4为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图4所示,活塞体60包括凹槽61,永磁体30固定于凹槽61内;凹槽61包括槽口a,槽口a设置于活塞体60靠近于电磁体20的一侧。
42.具体地,永磁体30固定于凹槽61内,在活塞体60带动永磁体30运动时,可以防止永磁体30在运动期间出现偏转错位,提高电磁制动踏板模拟器的可靠性。而且,在电磁体20断电时,电磁体20的电磁场消失,使得电磁体20与永磁体30之间的互斥力消失,永磁体30在活塞体60的联动作用下会撞向电磁体20,此时活塞体60与电磁体20直接接触,活塞体60可以保护永磁体30避免与电磁体20直接碰撞,从而可以增加永磁体30的使用寿命,进而可以增加电磁制动踏板模拟器的使用寿命。
43.参考图4,在凹槽61内,永磁体30与凹槽61的表面接触。当活塞体60沿和第一方向x和第一方向x的反方向带动永磁体30运动时,永磁体30与凹槽61的表面之间的摩擦作用可以用于固定永磁体30和活塞体60,实现永磁体30固定于凹槽61内。在其他实施例中,还可以在永磁体30与凹槽61之间设置固定结构,用于固定永磁体30与活塞体60。示例性地,在永磁
体30与凹槽61之间设置胶层,通过胶层的粘结作用固定永磁体30和活塞体60。
44.同时,槽口a设置于活塞体60靠近于电磁体20的一侧时,沿第一方向x,在电磁体20与永磁体30之间可以减少活塞体60的遮挡,可以降低活塞体60对电磁体20与永磁体30之间磁场的干扰,进而可以提高电磁制动踏板模拟器的模拟准确性和模拟灵敏度。
45.图5为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图5所示,沿第二方向y,槽口a的宽度小于永磁体30的宽度;其中,第二方向y与第一方向x相交,第一方向x为电磁体20和永磁体30的排列方向。
46.具体地,沿第二方向y,通过设置槽口a的宽度小于永磁体30的宽度,可以使永磁体30嵌入活塞体60,并通过槽口a将永磁体30卡在凹槽61内,从而可以在无需额外设置固定结构用于固定永磁体30与活塞体60的基础上,实现永磁体30与活塞体60的固定连接,同时保证永磁体30与活塞体60固定连接的可靠性。其中,如图5所示,第二方向y可以为永磁体30的厚度方向。或者,在其他实施例中,第二方向y还可以为永磁体30的宽度方向。
47.图6为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图6所示,电磁制动踏板模拟器还包括连杆70、第二铰链结构80和第三铰链结构90;
48.连杆70的第一端通过第二铰链结构80与活塞体60连接,连杆70的第二端通过第三铰链结构90与力转换机构40的输出端连接,连杆70的延伸方向与第一方向x相同;其中,第一方向x为电磁体20和永磁体30的排列方向。
49.具体地,第二铰链结构80和第三铰链结构90可以为球形铰链。活塞体60通过第二铰链结构80、连杆70和第三铰链结构90与力转换机构40连接,连杆70的延伸方向与第一方向x相同,连杆70通过第三铰链结构90与力转换机构40连接,力转换机构40可以与连杆70沿任意方向排列分布,从而有利于简化力转换机构40的设置。另外,当力转换机构40与连杆70的排列方向与第一方向x不同时,第三铰链结构90可以将力转换机构40输出的输出力转换为连杆70的旋转运动。然后通过第二铰链结构80将连杆70的旋转运动转换为第一方向x的反方向的运动方向,从而可以使得活塞体60沿第一方向x反方向运动时受力均匀,避免活塞体60在第一方向x的反方向上的受力不均导致错位的现象。示例性地,连杆70的运动方向为以第一方向x为轴心的旋转运动,通过第二铰链结构80可以将连杆70的旋转运动转换为第一方向x反方向的直线运动,使得活塞体60沿第一方向x的反方向运动时受力均匀。
50.图7为本发明实施例提供的另一种电磁制动踏板模拟器的结构示意图。如图7所示,电磁制动踏板模拟器还包括电流调节器100,电磁体20包括线圈21和铁芯22,线圈21绕设在铁芯22上;电流调节器100的输出端与线圈21连接,电流调节器100用于调节线圈21上的电流。
51.具体地,电流调节器100可以输出不同的电流,从而可以为线圈21提供不同的电流。当电流调节器100为线圈21提供的电流发生变化时,电磁体20产生的磁通量发生变化,从而可以调节电磁体20与永磁体30之间的互斥力。互斥力的变化可以调节在踏板力不变的情况下电磁制动踏板模拟器反馈至踏板50的模拟力,从而可以调节相同踏板力下驾驶员踩踏踏板50的感觉,实现驾驶员对踏板感觉的多样化需求。示例性地,在踏板力不变的情况下,通过调节电流调节器100为线圈21提供的电流增加,可以增加电磁体20与永磁体30之间的互斥力,该互斥力作用于永磁体30上,使得永磁体30将互斥力通过力转换机构40反馈至踏板50,从而可以调节驾驶员踩踏踏板50的感觉。同样,在踏板力不变的情况下,通过调节
电流调节器100为线圈21提供的电流减小,可以减小电磁体20与永磁体30之间的互斥力,该互斥力作用于永磁体30上,使得永磁体30将互斥力通过力转换机构40反馈至踏板50,从而可以调节驾驶员踩踏踏板50的感觉。
52.继续参考图7,第一侧面11上设置有电极接口12,电流调节器100的输出端通过电极接口12与线圈21连接。
53.具体地,电极接口12包括正电极接口和负电极接口,电流调节器100的输出端通过电极接口12与线圈21的两端连接,可以实现电流调节器100输出的电流传输至线圈21,为线圈21提供电流。
54.本发明实施例还提供一种车辆。该车辆包括本发明任意实施例提供的电磁制动踏板模拟器。
55.由于车辆包括本发明任意实施例提供的电磁制动踏板模拟器,因此具备本发明任意实施例提供的电磁制动踏板模拟器的有益效果,此处不再赘述。
56.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。