1.本技术涉及汽车安全技术领域,具体涉及一种前排座椅的主动避让系统及主动避让方法。
背景技术:
2.汽车在行驶的过程中,偶尔会发生事故。当发生高速碰撞时,前排座椅的乘员所受的危害较大。现有汽车的前排座椅在紧急情况下原地不动,且安全措施仅为安全带和安全气囊,所具有的保护效果不佳。
3.在发生高速碰撞时,前排座椅上的乘坐人员受到的伤害往往是最大的;前围和仪表板及转向管柱发生严重变形时,挤压了前排人的生存空间,可能导致前排人员腿被卡住而影响逃生,更甚至对腿造成严重伤害,或是由于被挤压后前排空间太小而导致前排人员死亡。
技术实现要素:
4.针对现有技术中存在的缺陷,本技术的目的在于提供一种前排座椅的主动避让系统及主动避让方法,在发生重大碰撞事故前,能够提前将前排座椅后滑避让,降低事故对前排乘员的伤害,大大提升了车辆安全性能。
5.为达到以上目的,采取的技术方案是:一种前排座椅的主动避让系统,所述前排座椅包含主驾座椅和副驾座椅,所述主动避让系统包括:设置于主驾座椅和副驾座椅底部的后滑系统;
6.设置于副驾座椅坐垫上表面的温度传感器;
7.设置于车身的速度传感器;
8.设置于车头的车载雷达传感器,其用于测量车辆与前方障碍物的相对速度和相对距离;
9.控制中心,连接于后滑系统、温度传感器、速度传感器和车载雷达传感器,并根据温度传感器、速度传感器、车载雷达传感器反馈的信号,在满足设定避让条件时控制主驾座椅、或者主副驾座椅底部的后滑系统启动,对应的座椅后滑。
10.在上述技术方案的基础上,所述主动避让系统还包含压力传感器,所述压力传感器设置于坐垫下方。
11.在上述技术方案的基础上,所述后滑系统包含设置于座椅底部的滚轮、座椅滑轨和驱动电机,所述驱动电机驱动滚轮滚动,所述滚轮沿座椅滑轨滑动,且驱动电机与控制中心相连。
12.在上述技术方案的基础上,所述设定避让条件为速度传感器检测到的速度大于设定安全速度、车载雷达传感器检测到的相对距离小于设定安全距离、且利用车载雷达传感器检测到的相对速度和相对距离、以及对应的极限安全减速度计算得出的最小模拟碰撞时间等于设定安全时间;
13.所述控制中心与车载ecu相连,当满足设定避让条件时,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,且控制中心通过车载ecu控制刹车系统以极限安全减速度进行刹车。
14.在上述技术方案的基础上,所述主动避让系统还包含设置于后排座椅且与控制中心相连的第二温度传感器和第二压力传感器;当第二温度传感器监测到的温度处于设定温度范围、且第二压力传感器检测到的压力超过设定压力值时,控制中心通过后滑系统控制前排座椅后滑的极限位置与后排座椅之间预留一定安全间隙。
15.本技术还公开了一种基于上述前排座椅主动避让系统的主动避让方法,包含以下步骤:
16.s1:温度传感器将副驾座椅的温度信号传输给控制中心,控制中心根据温度信号判断副驾座椅是否有人;若无人转s2;若有人转s3;
17.s2:速度传感器将速度信号发送给控制中心,车载雷达传感器将相对速度信号和相对距离信号发送给控制中心;若满足设定避让条件,控制中心控制主驾座椅底部的后滑系统启动,主驾座椅后滑;
18.s3:速度传感器将速度信号发送给控制中心,车载雷达传感器将相对速度信号和相对距离信号发送给控制中心;若满足设定避让条件,控制中心控制主驾座椅和副驾座椅底部的后滑系统启动,主驾座椅和副驾座椅后滑。
19.在上述技术方案的基础上,所述主动避让系统还包含压力传感器,所述压力传感器设置于坐垫下方;
20.步骤s1中,当温度传感器检测到的温度位于35~40℃,且压力传感器检测到的压力大于210n时,判定副驾座椅有人。
21.在上述技术方案的基础上,所述后滑系统包含设置于座椅底部的滚轮、座椅滑轨和驱动电机,所述驱动电机驱动滚轮滚动,所述滚轮沿座椅滑轨滑动,且驱动电机与控制中心相连;在步骤s2和s3中,驱动电机控制滚轮沿滑轨滚动。
22.在上述技术方案的基础上,所述设定避让条件为:
23.u1≥u0;
24.l≤l0;
25.δu=u
1-u2;
26.根据δu t=0.5at2+l计算得出的最小模拟碰撞时间t
min
;
27.t
min
=t0;
28.其中,u0为设定安全速度;u1为速度传感器检测到的速度;u2为前方障碍物的运动速度;δu为车载雷达传感器检测到的车辆与前方障碍物的相对速度;l为车载雷达传感器检测到的车辆与前方障碍物的相对距离;l0为设定安全距离;a为车辆速度为u1时对应的极限安全减速度;t0为设定安全时间。
29.在上述技术方案的基础上,所述控制中心与车载ecu相连,当满足设定避让条件时,步骤s2和s3还包含:控制中心通过车载ecu控制刹车系统以极限安全减速度进行刹车。
30.本技术提供的技术方案带来的有益效果包括:
31.1、本技术的主动避让系统,在发生重大碰撞事故前,前排主驾座椅肯定有人,通过设置温度传感器判定前排副驾座椅是否有人,为后续副驾座椅底部的后滑系统是否后滑提
供依据;若副驾座椅无人,则后续重大碰撞要发生前,主驾座椅后滑;若副驾座椅有人,则后续重大碰撞要发生前,主驾座椅和副驾座椅一起后滑。
32.本技术的主动避让系统,通过设置速度传感器检测车辆速度,通过设置车载雷达传感器测量车辆与前方障碍物的相对速度和相对距离;当满足设定避让条件时(判定会发生重大碰撞事故),控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,能够提前将前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,尤其降低了乘员腿部的伤害可能性,降低重大碰撞事故对前排乘员的伤害,大大提升了车辆安全性能。
33.2、本技术的主动避让系统,速度传感器设置于车身,用于监测车辆的行驶速度,本技术的速度传感器与车辆本身的速度显示仪表互不影响,独立监测;进一步提升了主动避让系统的安全可靠性,使得主动避让系统在出现重大碰撞时,不会因为车辆本身的速度显示仪表故障而出现错判。
34.3、本技术的主动避让系统,副驾座椅的温度传感器设置于坐垫上表面,温度传感器通过感应人体体温,用来判定副驾座椅上是否有人。副驾座椅还设置压力传感器,压力传感器设置于坐垫下方;压力传感器在温度传感器的基础上,进一步根据压力判断副驾座椅是否有人;当两个条件同时符合时,判定有人,双重判断条件使得判定结果更加准确。
35.4、本技术的主动避让系统,后滑系统包含滚轮、座椅滑轨和驱动电机,驱动电机驱动滚轮滚动,滚轮沿座椅滑轨滑动,且驱动电机与控制中心相连。当满足设定避让条件时,控制后滑系统启动,驱动电机直接开启最大转速,带动滚轮滚动,进而使得相应的座椅快速后滑;本技术的主动避让系统,提供了后滑系统的具体结构支撑,在满足主动避让条件时,控制中心控制驱动电机开启最大转速,通过滚轮和滑轨带动前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间。
36.5、本技术的主动避让方法,本技术的主动避让方法,通过设定明确的主动避让条件,即同时满足
①
u1≥u0,
②
l≤l0,
③
δut=0.5at2+l计算得出的最小模拟碰撞时间t
min
等于t0,判定即将发生重大碰撞事故,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,能够提前将前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,尤其降低了乘员腿部的伤害可能性,降低重大碰撞事故对前排乘员的伤害,大大提升了车辆安全性能。
附图说明
37.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
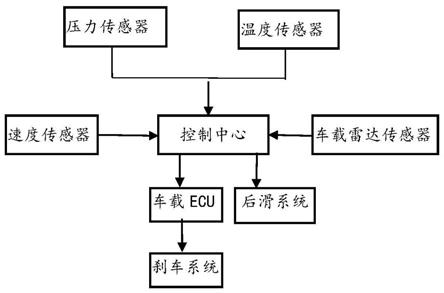
38.图1为本技术实施例提供的主动避让系统示意图。
具体实施方式
39.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不
用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
40.如图1所示,本技术公开了一种前排座椅的主动避让系统的实施例,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。后滑系统设置于主驾座椅和副驾座椅底部,主驾座椅可通过后滑系统后滑,副驾座椅也可通过后滑系统后滑。温度传感器设置于副驾座椅坐垫上表面,温度传感器通过感应人体体温,用来判定副驾座椅上是否有人。而主驾座椅上则无需设置温度传感器,因为车辆运行时,主驾座椅肯定有人。速度传感器设置于车身,用于监测车辆的行驶速度,本技术的速度传感器与车辆本身的速度显示仪表互不影响,独立监测;进一步提升了主动避让系统的安全可靠性,使得主动避让系统在出现重大碰撞时,不会因为车辆本身的速度显示仪表而出现差错。
41.车载雷达传感器设置于车头,具体地,车载雷达传感器位于前保险杠后方,车载雷达传感器用于获取车辆与前方障碍物(包括静止物体和前方移动车辆)的相对速度和相对距离。
42.控制中心,连接于后滑系统、温度传感器、速度传感器和车载雷达传感器。控制中心接收温度传感器的温度信号,并判定副驾座椅是否有人;控制中心接收速度传感器的速度信号、接收车载雷达传感器的相对速度和相对距离信号,并在满足设定避让条件时,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,使得对应的座椅后滑。
43.具体地,当控制中心根据温度传感器的温度信号,判定副驾座椅无人时,满足设定避让条件时,控制中心只控制主驾座椅底部的后滑系统启动,主驾座椅后滑。当控制中心根据温度传感器的温度信号,判定副驾座椅有人时,满足设定避让条件时,控制中心同时控制主副驾座椅底部的后滑系统启动,主驾座椅和副驾座椅同时后滑。具体地,主副驾座椅指的是主驾座椅和副驾座椅。
44.本技术的主动避让系统,在发生重大碰撞事故前,前排主驾座椅肯定有人,通过设置温度传感器判定前排副驾座椅是否有人,为后续副驾座椅底部的后滑系统是否后滑提供依据;若副驾座椅无人,则后续重大碰撞要发生前,主驾座椅后滑;若副驾座椅有人,则后续重大碰撞要发生前,主驾座椅和副驾座椅一起后滑。本技术的主动避让系统,通过设置速度传感器检测车辆速度,通过设置车载雷达传感器测量车辆与前方障碍物的相对速度和相对距离;当满足设定避让条件时(判定会发生重大碰撞事故),控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,能够提前将前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,尤其降低了乘员腿部的伤害可能性,降低重大碰撞事故对前排乘员的伤害,大大提升了车辆安全性能。
45.在一个实施例中,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。温度传感器设置于副驾座椅坐垫上表面,温度传感器通过感应人体体温,用来判定副驾座椅上是否有人。进一步地,主动避让系统还包含压力传感器,压力传感器设置于坐垫下方。压力传感器在温度传感器的基础上,进一步根据压力判断副驾座椅是否有人,双重判断条件使得判定结果更加准确。
46.具体地,当温度传感器检测到的温度处于设定温度范围时,即温度值位于35~40℃时;同时,当压力传感器检测到的压力值大于设定压力值,即压力值大于210n时;判定副
驾座椅有人。同时满足两个条件,副驾座椅有人的可能性更高,判定结果更加准确。
47.在一个实施例中,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。后滑系统设置于主驾座椅和副驾座椅底部,主驾座椅可通过后滑系统后滑,副驾座椅也可通过后滑系统后滑。后滑系统包含设置于座椅底部的滚轮、座椅滑轨和驱动电机,驱动电机驱动滚轮滚动,滚轮沿座椅滑轨滑动,且驱动电机与控制中心相连。当满足设定避让条件时,控制后滑系统启动,驱动电机直接开启最大转速,带动滚轮滚动,进而使得相应的座椅快速后滑。
48.本技术的主动避让系统,能够在满足主动避让条件时,驱动电机开启最大转速,通过滚轮和滑轨带动前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,提高了安全性能。
49.在一个实施例中,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。控制中心根据温度传感器、速度传感器、车载雷达传感器反馈的信号,在满足设定避让条件时控制主驾座椅、或者主副驾座椅底部的后滑系统启动,使得对应的座椅后滑。具体地,设定避让条件为速度传感器检测到的速度大于设定安全速度、车载雷达传感器检测到的相对距离小于设定安全距离、且利用车载雷达传感器检测到的相对速度和相对距离、以及对应的极限安全减速度计算得出的最小模拟碰撞时间等于设定安全时间。
50.控制中心与车载ecu相连,当满足设定避让条件时,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,带动相应的座椅后滑,且控制中心通过车载ecu控制刹车系统以相应的极限安全减速度进行刹车。具体地,车辆以某个速度行驶时,总存在一个极限安全减速度,即以该极限安全减速度进行减速,车辆既能进行减速又不存在翻车风险。速度与极限安全减速度的函数关系可以事先通过大量实验得出,并将该函数关系事先设置到控制中心中。
51.在座椅后滑的同时,控制中心通过车载ecu控制刹车系统进行刹车,既能保护前排乘员又能减小碰撞事故等级。
52.在一个实施例中,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。后滑系统设置于主驾座椅和副驾座椅底部,主驾座椅可通过后滑系统后滑,副驾座椅也可通过后滑系统后滑。温度传感器设置于副驾座椅坐垫上表面,温度传感器通过感应人体体温,用来判定副驾座椅上是否有人。主动避让系统还包含压力传感器,压力传感器设置于副驾座椅的坐垫下方。压力传感器在温度传感器的基础上,进一步根据压力判断副驾座椅是否有人,双重判断条件使得判定结果更加准确。
53.进一步地,主动避让系统还包含设置于后排座椅且与控制中心相连的第二温度传感器和第二压力传感器。第二温度传感器和第二压力传感器判定后排座椅是否有人的条件,与前排副驾座椅的判定条件相同。
54.当第二温度传感器监测到的温度处于设定温度范围时(即温度值位于35~40℃时)、且第二压力传感器检测到的压力值大于设定压力值(即压力值大于210n)时,判定副驾座椅有人。控制中心通过后滑系统控制前排座椅后滑的极限位置与后排座椅之间预留一定安全间隙。优选地,安全间隙为10cm的距离。该安全间隙能够防止前排座椅强力后滑对后排
乘员造成伤害。
55.本技术还公开了一种基于上述前排座椅主动避让系统的主动避让方法,包含以下步骤:
56.s1:温度传感器将副驾座椅的温度信号传输给控制中心,控制中心根据温度信号判断副驾座椅是否有人;若无人转s2;若有人转s3;
57.s2:速度传感器将速度信号发送给控制中心,车载雷达传感器将相对速度信号和相对距离信号发送给控制中心;若满足设定避让条件,控制中心控制主驾座椅底部的后滑系统启动,主驾座椅后滑;
58.s3:速度传感器将速度信号发送给控制中心,车载雷达传感器将相对速度信号和相对距离信号发送给控制中心;若满足设定避让条件,控制中心控制主驾座椅和副驾座椅底部的后滑系统启动,主驾座椅和副驾座椅后滑。
59.在一个实施例中,主动避让系统还包含压力传感器,压力传感器设置于坐垫下方;用于判断前排副驾座椅是否有人。
60.步骤s1中,当温度传感器检测到的温度位于35~40℃(接近人体体温),且压力传感器检测到的压力大于210n(六岁孩子的平均体重)时,判定副驾座椅有人。具体地,可以独立乘着副驾座椅的平均年龄为六岁,六岁孩子的平均体重为21kg,即210n。同时满足两个条件,副驾座椅有人的可能性更高,判定结果更加准确。
61.在一个实施例中,前排座椅包含主驾座椅和副驾座椅,主动避让系统包括后滑系统、温度传感器、速度传感器、车载雷达传感器和控制中心。后滑系统设置于主驾座椅和副驾座椅底部,主驾座椅可通过后滑系统后滑,副驾座椅也可通过后滑系统后滑。后滑系统包含设置于座椅底部的滚轮、座椅滑轨和驱动电机,驱动电机驱动滚轮滚动,滚轮沿座椅滑轨滑动,且驱动电机与控制中心相连。在步骤s2和步骤s3中,当满足设定避让条件时,控制后滑系统启动,驱动电机直接开启最大转速,带动滚轮滚动,进而使得相应的座椅快速后滑。
62.本技术的主动避让系统,能够在满足主动避让条件时,驱动电机开启最大转速,通过滚轮和滑轨带动前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,提高了安全性能。
63.在一个实施例中,设定避让条件为:
64.u1≥u0,车辆的行驶速度大于设定安全速度,因为低速状态的汽车不会发生重大碰撞。
65.l≤l0,车辆与前车的相对距离小于设定安全距离。
66.δu=u
1-u2,车辆与前车的相对速度,δu的数值只能为正数,即车辆正在接近前方障碍物;假定前方障碍物是静止或匀速。
67.根据δu t=0.5at2+l计算得出的两个t值中,取小值,即为最小模拟碰撞时间t
min
;该公式表明即便当下以a为减速度进行刹车,在经过t
min
时间段后还是会发生碰撞。该公式由u2t=u
1 t-0.5at
2-l变形得出。
68.t
min
=t0;t0为设定安全时间。
69.其中,u0为设定安全速度;u1为速度传感器检测到的速度;u2为前方障碍物的运动速度;δu为车载雷达传感器检测到的车辆与前方障碍物的相对速度;l为车载雷达传感器检测到的车辆与前方障碍物的相对距离;l0为设定安全距离;a为车辆速度为u1时对应的极
限安全减速度;t0为设定安全时间。
70.优选地,t0为3秒,3秒时间是普通人进行正常转向换道的安全反应时间。a为车辆速度为u1时对应的极限安全减速度,关于a与u1的函数关系事先测量得出。
71.本技术的主动避让方法,通过设定明确的主动避让条件,即同时满足
①
u1≥u0,
②
l≤l0,
③
δu t=0.5at2+l计算得出的最小模拟碰撞时间t
min
等于t0,判定即将发生重大碰撞事故,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,能够提前将前排座椅后滑避让,前排座椅提前后滑避让,带着座椅上的乘员一起后滑,扩大了前排乘员的生存空间,尤其降低了乘员腿部的伤害可能性,降低重大碰撞事故对前排乘员的伤害,大大提升了车辆安全性能。
72.在一个实施例中,控制中心与车载ecu相连,当满足设定避让条件时,步骤s2和s3还包含:控制中心通过车载ecu控制刹车系统以极限安全减速度进行刹车。控制中心与车载ecu相连,当满足设定避让条件时,控制中心控制主驾座椅、或者主副驾座椅底部的后滑系统启动,带动相应的座椅后滑,且控制中心通过车载ecu控制刹车系统以相应的极限安全减速度进行刹车。在座椅后滑的同时,控制中心通过车载ecu控制刹车系统进行刹车,既能保护前排乘员又能减小碰撞事故等级。
73.在本技术的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
74.需要说明的是,在本技术中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
75.以上所述仅是本技术的具体实施方式,使本领域技术人员能够理解或实现本技术。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而要符合与本文所申请的原理和新颖特点相一致的最宽的范围。