1.本发明涉及一种用于车辆的辅助系统的运行的方法以及一种车辆的辅助系统。
背景技术:
2.已知车辆的产生周围环境地图、所谓的“占用栅格地图(occupancy grid map)”的辅助系统。在这样一种周围环境地图中,能够映射车辆的周围环境中的对象。通常,借助于由车辆的环境传感装置感测的环境数据来产生周围环境地图。在此,尤其由于具有误差的环境数据和运动信息,能够导致周围环境地图中的图示与现实的偏差。
技术实现要素:
3.与此相对,本发明的方法的任务在于,能够提供具有特别精确且可靠的信息的周围环境地图。这通过一种用于车辆的辅助系统的运行的方法来实现,所述方法包括下述步骤:
[0004]-感测、尤其是借助于车辆的环境传感装置来感测该车辆的周围环境,
[0005]-在不同的时间点产生至少两个周围环境地图,尤其所述至少两个周围环境地图分别具有周围环境的成像,其中,每个周围环境地图划分为多个单元格,其中,基于对象在周围环境的相应于单元格的地点上的存在,给每个单元格分配预限定的值,
[0006]-对在车辆的周围环境中感测到的对象进行分类,
[0007]-借助于所述分类来识别静态对象,和
[0008]-将至少两个周围环境地图相互比较。
[0009]
在此,根据周围环境地图的、代表静态对象的对应单元格进行该比较。
[0010]
换言之,在该方法中,基于所感测的周围环境产生尤其也可以被称为“占用栅格地图(occupancy grid map)”的两个周围环境地图。每个周围环境地图划分为多个单元格,分别给这些单元格分配预确定的值。在此,基于在车辆周围环境中的与特定单元格的地点相应的地点上是否存在对象来给单元格分配值。尤其,由此能够对车辆进行定位,优选相对于对象进行定位。例如,可以将数值作为值分配给单元格,所述数值优选要么标记是否存在对象,要么标记是否不存在对象。
[0011]
对在车辆的周围环境中感测到的对象进行分类。在此,将对象识别和划分为不同的类别被视为分类。尤其,在此,将对象划分为静态的和可运动的(或者非静态的)对象。接下来,从经分类的对象中识别出被分类为静态的对象。接下来,将两个周围环境地图的如下那些区域用于这两个周围环境地图的比较:在所述区域的相应周围环境地点上已识别出静态对象。优选地,在此,忽略周围环境地图的所有其他区域。在此,将其在周围环境中的地点不随时间变化的对象视为静态对象,例如建筑物、墙壁、树或者其他结构物体。这意味着,根据在周围环境中始终具有同一地点的不可运动物体来进行周围环境地图的比较,使得例如能够特别可靠地确定关于这些对象的相对位置。
[0012]
因此,该方法提供如下优点:将周围环境的不可运动区域用于周围环境地图的比
较。例如,在此,即使当在特定区域中驶过周围环境之间的时间间隔大时也能够可靠且通过简单的方式比较和确认先前产生的、同一区域中的第一周围环境地图。这能够特别简单且可靠地实现,因为例如静态对象不改变其在周围环境中的地点。因此,能够提供具有特别高精度的周围环境地图,以便例如允许在周围环境地图中对车辆的尽可能高的定位精确度。
[0013]
优选实施方式的内容是本发明的优选扩展方案。
[0014]
优选地,所述方法还包括下述步骤:基于将至少两个周围环境地图的相互比较,在这些周围环境地图中的至少一个周围环境地图中定位车辆。优选地,为此,第一周围环境地图的第一次感测作为所谓的“训练”来进行,例如借助于车辆的由驾驶员手动控制的行驶来进行。在此,在周围环境地图内确定车辆的位置和定向被视为定位。例如,借助于车辆的测距法和环境传感装置将对象绘入到第一周围环境地图中。稍后,通过在周围环境的同一区域中的第二次行驶能够借助于第二次感测产生第二周围环境地图并且将其与第一周围环境地图进行比较。因此,基于该比较能够估计车辆的尤其是相对于绘入在周围环境地图中的对象或者类似物的位置。由于根据静态对象来相互比较这两个周围环境地图,因此能够实现车辆的特别精确且可靠的定位。
[0015]
优选地,所述方法还包括下述步骤:优先考虑代表周围环境中的静态对象的单元格。在此,借助被优先考虑的单元格来进行至少两个周围环境地图的相互比较。例如在分析评价周围环境地图时对被优先考虑的单元格的优先处理能够被视为优先考虑。特别优选地,能够给周围环境地图的全部单元格分配权重因数,该权重因数例如与单元格的值相乘。在此,该优先考虑可以包括权重因数的提高,使得代表静态对象的那些单元格的值例如在车辆的定位中更重要,由此能够实现障碍物地图的更高精确度。
[0016]
特别优选地,所述方法还包括下述步骤:借助于分类来识别车辆周围环境中的可运动对象。在此,将周围环境地图的代表可运动对象的那些单元格排除在至少两个周围环境地图的比较之外。优选地,将代表可运动对象的那些单元格附加地排除在车辆定位步骤之外。这意味着,如下单元格不用于两个周围环境地图的比较:在所述单元格的相应周围环境地点上已识别出可运动对象。例如,在比较时能够忽略这些单元格。例如,能够给这些单元格分配预确定的、尤其是附加的值,该值限定了在比较时不考虑相应的单元格。由此,在比较周围环境地图时以及在这些周围环境地图中的至少一个周围环境地图中定位车辆时能够实现特别高的精确度,因为不考虑由于可运动对象在记录周围环境地图的不同时间点的位置不同所引起的可能有误差的信息。此外,该方法能够特别简单且节省资源地实施,因为例如对于比较的步骤并且尤其也对于定位的步骤来说需要精确地感测和分析较少量的周围环境中对象。
[0017]
优选地,所述方法还包括下述步骤:使周围环境地图的代表可运动对象的那些单元格中性化(neutralisieren)。在此,将“使单元格的值复位到标准值、尤其是在分配之前存在的标准值”视为中性化。尤其将“使单元格这样复位以使其代表状态“无对象
””
视为中性化。替代地,通过该中性化也能够将单元格设定为状态“已占用”,即能够这样设定,使得该单元格标记有对象。通过针对识别出的可运动对象使单元格中性化,能够通过特别简单的方式突出周围环境地图的代表静态对象的区域,以便能够借助简单且成本有利的手段实现精确的比较和精确的定位。
[0018]
优选地,所述方法还包括下述步骤:借助于分类来识别车辆的周围环境中的交通
参与者。在此,将识别出的交通参与者辨识为可运动对象。在此,将人、动物和任意类型车辆,尤其是位于借助于所述车辆能驶过的周围环境区域内的人、动物和任意类型车辆被视为交通参与者。在此,这些对象中的每个对象都被视为交通参与者,无论其在感测时间点是运动还是静止。这意味着,例如停放的机动车,无论是否有乘客,都被识别为交通参与者并且相应地辨识为可运动对象。
[0019]
进一步优选,对车辆的周围环境的感测包括借助于摄像机产生摄像机成像。在此,借助于对摄像机成像的分析评价来进行对车辆周围环境中所感测到的对象的分类。摄像机优选是车辆的环境传感装置的一部分。通过对借助于摄像机产生的摄像机成像的分析评价能够通过简单且可靠的方式来实施该分类。
[0020]
特别优选,自动化地借助于分析评价单元来实施该分类。例如,分析评价单元可以是车辆的控制设备的一部分,或者可以替代地、除了控制设备之外还设置分析评价单元。尤其,分析评价单元能够包括算法,该算法设置为用于分析所产生的摄像机成像用以分类并且根据该摄像机成像辨识静态对象和可运动对象。例如,分析评价单元能够具有人工智能,借助于该人工智能来实施分类。
[0021]
优选地,能手动地借助于车辆用户的用户输入来实施和/或确认该分类,尤其是借助于人机接口,例如显示和/或输入设备。例如,在此,能够借助于显示和/或输入设备向用户显示所产生的周围环境摄像机成像,其中,用户能够选择图像的区域并且能够将这些区域标记为静态的或者可运动的。替代地或者附加地,借助于显示和/或输入设备可以显示:哪些区域已被分析评价单元分类为静态的或者可运动的。通过用户的输入能够确认或者适配这些区域。由此,使得能够以对于驾驶员而言可检验且特别可靠的方式实施该方法,因为通过与驾驶员的互动能够检验并且必要时适配正确的分类功能。
[0022]
优选地,所述方法还包括下述步骤:识别车辆周围环境中的l形对象。在此,将识别出的l形对象辨识为静态对象。在此,将具有两个至少基本上笔直的面-这些面以直角或者以优选20
°
至160
°
之间的角度相交
‑‑
的对象视为l形对象,尤其其中,这些面中的各个面竖直地布置。例如,这种l形对象指的是例如墙壁或者房屋那样的结构构造。因此,通过识别这种l形结构能够以特别简单的方式识别:在周围环境的哪些区域上存在静态对象、即不可运动对象,而优选无需例如对这些对象的成像进行费事的分析。
[0023]
另外,本发明提出一种车辆的辅助系统。该辅助系统包括设置为用于感测车辆的周围环境的环境传感装置和设置为用于实施所描述的方法的控制设备。尤其,环境传感装置在此也设置为用于感测车辆的测距法数据。在此,能够以特别低且成本有利的硬件耗费提供辅助系统,以便能够以高精确度和对于驾驶员而言的高舒适性来运行车辆。
[0024]
优选地,辅助系统的环境传感装置包括雷达传感器和/或激光雷达传感器用以感测周围环境。特别有利的是使用具有中等有效距离的雷达传感器,该中等有效距离例如在直至最大50m的、优选直至最大25m的、尤其至少5m的范围中。在此,基于借助于环境传感装置所感测的环境数据来产生周围环境地图以及优选地也在周围环境地图中定位车辆。
[0025]
特别优选,辅助系统的环境传感装置还具有摄像机用以感测周围环境并且用以产生周围环境的摄像机成像。优选地,该摄像机是近程摄像机,尤其是设置为用于感测在与车辆相距1m至20m之间的区域中感测周围环境的近程摄像机。
[0026]
优选地,辅助系统还包括分析评价单元和/或输入设备。在此,分析评价单元设置
为用于自动地对在车辆的周围环境中感测到的对象进行分类。例如,分析评价单元可以是车辆的控制设备的一部分,或者替代地可以除了控制设备之外还设置有分析评价单元。替代地或者附加地,该分类能够借助于输入设备、尤其是借助于由车辆用户进行的手动输入来进行和/或被确认。
附图说明
[0027]
下面,根据实施例结合附图说明本发明。在附图中,功能相同的构件分别用相同的附图标记来标明。在此示出:
[0028]
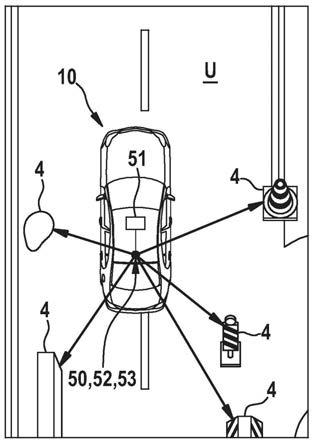
图1根据本发明的一个优选实施例的具有辅助系统的车辆的运行的示意性简化图,和
[0029]
图2示出图1的车辆的运行的另外的示意图。
具体实施方式
[0030]
图1和2示出具有辅助系统50的车辆10的示意性简化图。在此,示出用于车辆10的辅助系统50的运行的方法的多个不同的简化图。
[0031]
辅助系统50包括环境传感装置52,该环境传感装置设置为用于感测车辆10的周围环境u。环境传感装置52包括雷达传感器、激光雷达传感器和摄像机。借助于环境传感装置52能够感测车辆10的周围环境u中的对象4,例如呈障碍物形式的对象,如例如图1(a)中示意性示出的那样。
[0032]
另外,辅助系统50包括控制设备51,该控制设备设置为用于基于所感测的周围环境u产生周围环境地图2,该周围环境地图是周围环境u的影像,如图1(b)中所示出的那样。
[0033]
周围环境地图2划分为多个单元格3。在此,周围环境地图2是二维的并且构造在车道表面的平面中,在该平面上车辆10能够在周围环境u中前进。单元格3是正方形的并且具有1m的边长。整个周围环境地图2同样是正方形的并且在长度和宽度上分别具有十个并列的单元格3,即该周围环境地图2反映具有10m边长的区域。
[0034]
基于感测到的对象4,给周围环境地图2的如下每个单元格3分配预限定的值:所述单元格位于周围环境地图2的与周围环境u的具有对象4的地点相应的地点处。例如,给在周围环境地图2中代表如下地点的相应的单元格3a分配代表状态“已占用”的值:在周围环境u中在该地点处有对象4(参见图1(b))。
[0035]
借助于周围环境地图2能够实施对周围环境u中的车辆10的定位。为此,在另一时间点产生第二周围环境地图2b并且将其与至少一个另外的第一周围环境地图2a相比较。这在图2(c)中简化地示出。
[0036]
在此,首先,在第一次训练行驶中借助车辆10,例如通过驾驶员手动控制地驶过周围环境u的区域。在该训练行驶期间产生第一周围环境地图2a。这在图2(a)和(b)中示出。
[0037]
当车辆10例如在后来的时间点重新位于周围环境u的同一区域中时,在第二步骤中能够产生第二周围环境地图2b。在此,在两个周围环境地图2a、2b中的每个周围环境地图中,给所有的单元格3分配相应的值,以便代表周围环境u中的对象4或者空闲区域。
[0038]
接下来,在另外的步骤中,将两个周围环境地图2a、2b相互比较。这在图2(c)中示意性地示出。在此,根据代表确定的对象4b的那些单元格3能够将两个周围环境地图2a、2b
叠置,并且由此能够在第二次行驶中根据两个周围环境地图2a、2b以特别高的精确度对周围环境u中的车辆10进行定位。
[0039]
在车辆10运动的周围环境中,随着时间经常可能发生周围环境u的变化。在周围环境u中可能有可运动对象4b,例如其他交通参与者,例如行人和行驶的或者停放的车辆(参见图2(a))。这种可运动对象4b可能例如在创建周围环境地图2a、2b的两个时间点位于不同的地点,或者能够例如在第二周围环境地图2b的第二次感测时不再布置在周围环境u的同一区域内。为了即使在这种周围环境可变的情况下也能够实现辅助系统50的简单且可靠的功能,实施下文描述的用于辅助系统50的运行的方法。
[0040]
在此,借助于环境传感装置52对在车辆10的周围环境u中感测到的对象4进行分类。所述分类借助于由环境传感装置52的摄像机所感测的摄像机成像来进行。替代地或者附加地,所述分类也能够根据借助于雷达传感器和/或借助于激光雷达传感器所记录的环境数据来进行。为此,借助于辅助系统50的分析评价单元53来分析摄像机成像。在此,将感测到的对象4分类为静态对象4a和可运动对象4b。例如,将在图2(a)中示例性示出的行人和停放的车辆识别和相应地分类为可运动对象4b。另外,将在图2(a)中限界停车空间的墙壁识别和相应地分类为静态对象4a。
[0041]
在此,可以通过特别简单的方式这样实施所述分类,使得在周围环境u中搜索l形对象,并且将识别出的l形对象辨识为静态对象4b。例如,根据侧面41l形地、在这种情况下直角地相交,能够简单地将图2(a)中的墙壁识别为静态对象4b。
[0042]
在对对象4分类了之后,这样进行两个周围环境地图2a、2b的比较,使得仅考虑代表静态对象4a的那些单元格。为了简化这个过程,使周围环境地图2a、2b的代表可运动对象4b的区域40b中性化(参见图2(b))。这意味着,给代表可运动对象4b的那些单元格3b分配表示状态“未被占用”或者说“无对象”的值。由此,将相应的单元格3b排除在周围环境地图2a、2b的比较之外,并因此也排除在随后的对车辆10的定位之外。
[0043]
在此,代表可运动对象4b的特定单元格3b的中性化提供如下优点:能够避免在比较和/或定位时例如由于在产生对应的周围环境地图2a、2b的两个时间点之间略微运动了的对象4引起的误差。尤其,因此只留下周围环境地图2a、2b中的始终位于周围环境u内的同一地点上的区域。因此,能够通过简单的方式并且以特别高的精度提供周围环境地图2a、2b,以便借助于周围环境地图2a、2b能够实现车辆10的尽可能高的定位精确度。