1.本实用新型涉及清洁机器人领域,尤其涉及一种用于清洁机器人的主基站及其清洁机器人系统。
背景技术:
2.当前的室内清洁机器人系统的维护基站仅能对清洁机器人的一种清洁方式进行维护。具体地,室内清洁机器人系统的维护基站对清洁机器人内的尘盒进行维护处理。或者对清洁机器人内的拖布进行清洗。由于智能清洁机器人一般包括用于对清洁区域的灰尘进行清扫的机器人、对清洁区域进行拖抹的机器人或者既具有清扫功能又具有拖抹功能的扫拖一体机器人。如此,现有的清洁机器人系统的维护基站既要进行拖布清洗,又要进行自动集尘,因此体积大、操作不方便且自身的维护也比较复杂。
3.因此,有必要提出一种用于清洁机器人的主基站及其清洁机器人系统,以克服上述缺陷。
技术实现要素:
4.有鉴于此,本技术实施方式提供了一种体积小、操作方便且维护简单的用于清洁机器人的主基站及其清洁机器人系统。
5.本实用新型的上述目的可采用下列技术方案来实现:一种用于清洁机器人的主基站,所述主基站包括:第二机架,其上设置有用于供所述清洁机器人的清洁件进行清洗的清洗槽;回收装置,其设置于所述第二机架上,包括至少一个回收箱;所述回收箱用于与所述清洗槽和/或所述清洁机器人的集尘盒相连通,以使所述回收箱能回收所述清洗槽内的污水和/或所述集尘盒内的异物;清水箱,其设置于所述第二机架上,用于向所述清洗槽内输送清水;所述第二机架上设置有一个向上敞开的取放开口,所述取放开口用于供所述清水箱和所述回收箱从所述第二机架上取出或放入。
6.作为一种优选的实施方式,所述清水箱和至少一个所述回收箱的重心在一条直线上。
7.作为一种优选的实施方式,所述清水箱和所述回收箱之间在所述第二机架的高度方向上至少两两有部分重叠。
8.作为一种优选的实施方式,所述第二机架上能转动地设置有盖体,所述盖体用于打开或关闭所述取放开口。
9.作为一种优选的实施方式,所述取放开口设置于所述第二机架的顶壁上,所述清水箱和所述回收箱至少一个朝向所述取放开口。
10.作为一种优选的实施方式,所述第二机架上设置有位于所述回收装置和所述清水箱下方的停放部,所述停放部具有面向上方的停放面,所述停放面用于供所述清洁机器人停放。
11.作为一种优选的实施方式,所述停放面向下凹陷形成所述清洗槽。
12.作为一种优选的实施方式,所述回收装置包括两个互不连通的所述回收箱,两个所述回收箱分别与所述清洗槽和所述集尘盒相连通,以使两个所述回收箱能分别回收所述污水和所述异物。
13.作为一种优选的实施方式,所述回收装置包括一个所述回收箱和与所述回收箱相连通的三通阀;所述三通阀用于使所述回收箱轮流与所述清洗槽和所述集尘盒相连通,以使所述回收箱能轮流回收所述污水和所述异物。
14.一种清洁机器人系统,包括上述的主基站,还包括:清洁机器人,所述清洁机器人包括:第一机架;安装于所述第一机架上的集尘盒和/或清洁件。
15.本技术提供的用于清洁机器人的主基站及其清洁机器人系统的有益效果是:本技术实施方式所述的用于清洁机器人的主基站及其清洁机器人系统在主基站上设置清洗槽和回收装置,该回收装置包括至少一个回收箱;该回收箱用于与清洗槽和/或集尘盒相连通,以使回收箱能回收清洗槽内的污水和/或集尘盒内的异物。从而本技术实施方式所述的清洁机器人系统能通过清洗槽对拖布进行清洗,并通过回收箱进行回收清洗槽内的污水;又能通过回收箱对集尘盒进行自动集尘。进一步地,本技术的第二机架上设置有清水箱。该清水箱用于向清洗槽内输送清水。第二机架上设置有一个向上敞开的取放开口。该取放开口用于供清水箱和回收箱从第二机架上取出或放入,如此当需要对回收箱内的污水和/或异物进行清理时,只需要通过该取放开口即可取出回收箱。并在清理完成之后通过该取放开口将回收箱放入第二机架上。或者当需要向清水箱内添加清水时,只需要通过该取放开口即可取出清水箱。并在添加清水完成之后通过该取放开口将清水箱放入第二机架上,如此操作方便、维护简单。且清水箱与两个回收箱之间的排布方式能方便用户的取放操作并同时不增大第二机架的空间体积,因此该主基站自身的维护操作较简单且体积小。因此,本技术实施方式所述的清洁机器人系统内的主基站方便维护、体积小、操作简单,且用户为了维护具有不同清洁方式的机器人,无需配备多套基站。因此,本技术实施方式提供了一种体积小、操作方便且维护简单的主基站及其清洁机器人系统。
附图说明
16.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本实用新型实施方式所提供的一种清洁机器人的结构示意图;
18.图2是本实用新型实施方式所提供的主基站的第一实施例的结构示意图;
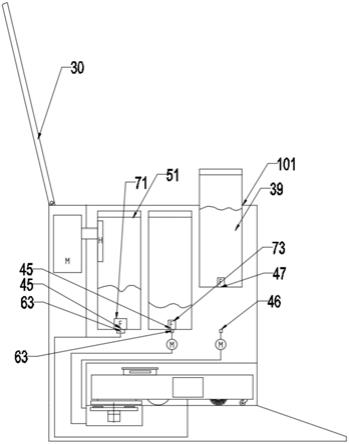
19.图3是本实用新型实施方式所提供的清洁机器人系统的结构示意图;
20.图4是本实用新型实施方式所提供的清洁机器人系统的换水状态示意图;
21.图5是本实用新型实施方式所提供的清水箱、第一箱体和第二箱体排列的一种俯视图;
22.图6是本实用新型实施方式所提供的清水箱、第一箱体和第二箱体排列的另一种俯视图;
23.图7是本实用新型实施方式所提供的主基站的第二实施例的结构示意图;
24.图8是本实用新型实施方式所提供的三通阀的第一工作状态图;
25.图9是本实用新型实施方式所提供的三通阀的第二工作状态图。
26.附图标记说明:
27.11、第一机架;13、集尘盒;15、清洁件;16、滚刷;18、驱动轮;19、万向轮;21、第二机架;23、主体部;25、延伸部;26、进入口;27、分离装置;28、斜面;29、停放部;30、盖体;31、停放面;33、清洗槽;35、清洗工作头;37、刮污件;39、清水箱;41、净水管道;44、供水泵;46、第三敞口;47、第四敞口;49、第一阀门;51、第一箱体;53、第二箱体;55、回收箱;57、第一回收管道;59、第二回收管道;63、第一敞口;45、第二敞口;43、气流发生器;69、动力机构;71、第二阀门;73、第三阀门;75、三通阀;77、第一延伸段;79、第二延伸段;81、第三延伸段;83、第一流道;85、第二流道;87、第三流道;89、连接管;91、第一连接口;93、第二连接口;97、安全截止阀;98、污水;99、异物;101、取放开口。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.请参阅图1及图9。本技术实施方式提供一种用于清洁机器人的主基站,其包括:第二机架21,其上设置有用于供清洁机器人的清洁件15进行清洗的清洗槽33;回收装置,其设置于所述第二机架21上,包括至少一个回收箱55;所述回收箱55用于与所述清洗槽33和/或清洁机器人的集尘盒13相连通,以使所述回收箱55能回收所述清洗槽33内的污水98和/或所述集尘盒13内的异物99;清水箱39,其设置于所述第二机架21上,用于向所述清洗槽33内输送清水;所述第二机架21上设置有一个向上敞开的取放开口101,所述取放开口101用于供所述清水箱39和所述回收箱55从所述第二机架21上取出或放入。
30.从以上技术方案可以看出:本技术实施方式所述的用于清洁机器人的主基站上设置清洗槽33和回收装置,该回收装置包括至少一个回收箱55;该回收箱55用于与清洗槽33和/或集尘盒13相连通,以使回收箱55能回收清洗槽33内的污水98和/或集尘盒13内的异物99。从而本技术实施方式所述的清洁机器人系统能通过清洗槽33对拖布进行清洗,并通过回收箱55进行回收清洗槽33内的污水98;又能通过回收箱55对集尘盒13进行自动集尘。进一步地,本技术的第二机架21上设置有清水箱39。该清水箱39用于向清洗槽33内输送清水。第二机架21上设置有一个向上敞开的取放开口101。该取放开口101用于供清水箱39和回收箱55从第二机架21上取出或放入,如此当需要对回收箱55内的污水98和/或异物99进行清理时,只需要通过该取放开口101即可取出回收箱55。并在清理完成之后通过该取放开口101将回收箱55放入第二机架21上。或者当需要向清水箱39内添加清水时,只需要通过该取放开口101即可取出清水箱39。并在添加清水完成之后通过该取放开口101将清水箱39放入第二机架21上,如此操作方便、维护简单。且清水箱39与两个回收箱55之间的排布方式能方便用户的取放操作并同时不增大第二机架21的空间体积,因此该主基站的体积小。因此,本技术实施方式所述的清洁机器人系统内的主基站方便维护、操作简单、体积小,且用户为了维护具有不同清洁方式的机器人,无需配备多套基站。
31.在本实施方式中,图1示出了本技术实施方式的一种清洁机器人的结构示意图。如图1所示,具体地,该清洁机器人包括:第一机架11以及安装于第一机架11上的集尘盒13和/或清洁件15。具体地,第一机架11上仅仅安装有集尘盒13,如此该清洁机器人可以为清扫机器人。或者第一机架11上仅仅安装有清洁件15,如此该清洁机器人可以为拖抹机器人。或者第一机架11上既安装有集尘盒13,又安装有清洁件15,如此该清洁机器人可以为扫拖一体机器人。
32.进一步地,该集尘盒13用于收集待清洁区的异物99。第一机架11上还设置有吸尘风扇以及与集尘盒13相连通的风道。该风道具有向外敞开的吸尘口。该吸尘风扇通过该吸尘口将异物99吸入集尘盒13内。该异物99可以是灰尘或者固体垃圾,对此本技术不做规定。
33.进一步地,如图1所示,该第一机架11上还设置有可旋转运动的滚刷16。该滚刷16旋转时可以对待清洁区进行清扫,且该滚刷16扫起的灰尘及固体垃圾通过吸尘风扇产生的吸力被吸入集尘盒13内。具体地,如图1所示,第一机架11沿前后方向间隔设置有驱动轮18和万向轮19。该驱动轮18用于驱动第一机架11移动和改变第一机架11的行进方向。该万向轮19用于辅助支撑第一机架11。滚刷16位于驱动轮18与万向轮19之间。如此该滚刷16能在第一机架11在待清洁区内移动时,相对于待清洁区转动,进而对待清洁区进行清扫。
34.进一步地,集尘盒13的底部设置有排尘口。集尘盒13内设置有覆盖该排尘口的盖板。该盖板能相对于集尘盒13转动,进而打开排尘口,使得集尘盒13内的异物99能通过该排尘口从所述集尘盒13内部转移出。
35.进一步地,清洁件15用于擦拭待清洁区。该清洁件15例如可以是大体呈长方形的可水洗的拖布。当然该清洁件15不限于为拖布,还可以是其他的材料,例如海绵等,对此本技术不做规定。且该清洁件15不限于为长方形,还可以是其他的形状,例如三角形等,对此本技术不做规定。进一步地,如图2所示,清洁件15设置于第一机架11的底部。如此该清洁件15在一定对地压力下,对待清洁区进行擦拭清洁。
36.进一步地,如图2、图7所示,第二机架21整体上呈中空结构,该中空部分形成内腔。进一步地,第二机架21包括主体部23和设置于主体部23一侧的延伸部25。例如如图2所示,主体部23大致呈长方体状。延伸部25位于主体部23的一侧。且延伸部25具有朝向主体部23倾斜的斜面28。进一步地,第二机架21上设置有向外敞开的进入口26。该进入口26与内腔相连通。该进入口26用于供清洁机器人通过,从而使得清洁机器人能进入第二机架21的内腔中。例如如图2所示,该进入口26设置于主体部23的右侧。且进入口26朝向延伸部25的斜面28敞开。从而清洁机器人能通过延伸部25的斜面28通过进入口26进入第二机架21内。
37.进一步地,第二机架21上还设置有停放部29。该停放部29具有面向上方的停放面31。该停放面31用于供清洁机器人停放。例如如图2所示,该停放部29设置于第二机架21的下部。且该进入口26朝向停放面31敞开,从而清洁机器人能通过该进入口26停放于停放面31上。
38.在本实施方式中,第二机架21上设置有用于供清洁件15进行清洗的清洗槽33。具体地,例如如图2所示,停放面31向下凹陷形成槽口向上的清洗槽33。也即清洗槽33的槽口向上敞开。且清洁机器人能在清洗槽33的上方停靠。如此一方面当清洁机器人停放于停放面31上时,该第一机架11上的清洁件15能放置于清洗槽33内;另一方面,清洁机器人位于清洗槽33的上方能节省第二机架21内的空间,方便操作。进一步地,清洗槽33内设置有清洗装
置。该清洗装置包括能转动的清洗工作头35和设置于清洗工作头35上的刮污件37。该刮污件37用于对清洁件15进行刮擦。具体地,该刮污件37可以是刮板或者刮刷。需要清洗时,首先,将清洁件15放置于清洗槽33内。然后转动清洗工作头35,以使刮污件37能对清洁件15与待清洁区接触的表面进行刮擦。
39.进一步地,第二机架21上还设置有清水箱39。例如如图2所示,停放部29位于清水箱39的下方。如此清洁机器人停放于停放部29上时,清洁机器人位于清水箱39的下方。进而能节省第二机架21内的空间。进一步地,该清水箱39用于向清洗槽33内输送清水。该清水用于冲刷清洗工作头35、刮污件37和清洁件15表面的污渍,并将污渍冲入清洗槽33内。
40.进一步地,第二机架21上设置有连通清水箱39和清洗槽33的净水管道41。该净水管道41上设置有供水泵44。从而开启供水泵44,清水能通过该净水管道41从清水箱39流入清洗槽33内。具体地,例如如图2所示,净水管道41的上端与清水箱39相连,下端与清洗槽33相连。进一步地,净水管道41位于清水箱39的下方。净水管道41具有向上敞开的第三敞口46。清水箱39具有向下敞开的第四敞口47。该第三敞口46能与第四敞口47沿上下方向相对接。从而如图2所示,当清水箱39内清水较少需要增加清水时,用于可以将清水箱39从第二机架21内向上取出。在增加了清水后。可以将清水箱39放入第二机架21内,以使清水箱39的第四敞口47与净水管道41的第三敞口46沿上下方向相对接,如此简化了用户换水的操作。
41.进一步地,清水箱39内设置有用于打开和关闭第四敞口47的第一阀门49。例如如图2所示,第一阀门49设置于清水箱39的底部。该第一阀门49用于控制清水箱39内的清水的流出。从而可以在将清水箱39从第二机架21上取出前关闭第一阀门49,以避免清水从第四敞口47流出。当清水箱39与净水管道41相连时,可以打开第一阀门49,以允许清水从第四敞口47流入净水管道41内。
42.在本实施方式中,第二机架21上设置有回收装置。该回收装置包括至少一个回收箱55。该至少一个可以是1个或者多个。例如如图7所示,该回收装置包括一个回收箱55。例如如图3所示,该回收装置包括两个回收箱55。进一步地,回收箱55用于与清洗槽33和/或集尘盒13相连通,以使回收箱55能回收清洗槽33内的污水98和/或集尘盒13内的异物99。也即如图7所示,回收箱55用于与清洗槽33和集尘盒13相连通,以使回收箱55能回收清洗槽33内的污水98和集尘盒13内的异物99。或者如图3所示,回收箱55用于与清洗槽33或集尘盒13相连通,以使回收箱55能回收清洗槽33内的污水98或集尘盒13内的异物99。如此,本技术实施方式所述的清洁机器人系统能通过清洗槽33对拖布进行清洗,并通过回收箱55进行回收清洗槽33内的污水98;又能通过回收箱55对集尘盒13进行自动集尘。
43.进一步地,例如如图2所示,停放部29位于回收箱55的下方。如此清洁机器人停放于停放部29上时,清洁机器人位于回收箱55的下方。进而能节省第二机架21内的空间。
44.进一步地,图3示出了本技术实施方式所提供的主基站的第一实施例。下面结合图3,详细描述该第一实施例。
45.具体地,在本实施例中,回收装置包括两个互不连通的回收箱55。例如如图3所示,该两个回收箱55分别为位于左侧的第一箱体51和位于右侧的第二箱体53。进一步地,该两个回收箱55分别与清洗槽33和集尘盒13相连通,以使两个回收箱55能分别回收污水98和异物99。例如如图3所示,该第一箱体51用于与集尘盒13相连通,以使第一箱体51能回收异物99。该第二箱体53用于与清洗槽33相连通,以使第二箱体53能回收污水98。如此由于第一箱
体51和第二箱体53互不连通,也即第一箱体51和第二箱体53相互独立,所以第一箱体51回收异物99与第二箱体53回收污水98可以并行进行,也可以先后进行。也即第一箱体51回收异物99的同时第二箱体53回收污水98。或者第一箱体51回收异物99在第二箱体53回收污水98之前或者之后。
46.进一步地,如图3所示,两个回收箱55设置于停放部29的上方。如此清洁机器人停靠于停放部29上时,清洁机器人位于两个回收箱55的下方。进而能节省第二机架21内的空间。
47.进一步地,第二机架21上还设置有两个回收管道。具体地,该两个回收管道分别为位于左侧的第一回收管道57和位于右侧的第二回收管道59。进一步地,两个回收管道与两个回收箱55相对应。该相对应可以是回收箱55的位置与回收管道的位置相一致。例如如图3所示,两个回收管道分别位于两个回收箱55的下方。进一步地,回收管道与对应的回收箱55相连通,以使回收箱55能通过对应的回收管道回收清洗槽33内的污水98或集尘盒13内的异物99。具体地,如图3所示,该第一回收管道57与第一箱体51相连通,以使该第一箱体51能通过该第一回收管道57回收集尘盒13内的异物99。该第二回收管道59与第二箱体53相连通,以使该第二箱体53能通过该第二回收管道59回收清洗槽33内的污水98。
48.进一步地,回收管道位于对应的回收箱55的下方。例如如图4所示,第一回收管道57位于第一箱体51的下方。第二回收管道59位于第二箱体53的下方。进一步地,回收管道具有向上敞开的第一敞口63。例如如图4所示,第一回收管道57和第二回收管道59的上端均具有向上敞开的第一敞口63。进一步地,回收箱55具有向下敞开的第二敞口45。例如如图4所示,第一箱体51和第二箱体53的底部均具有向下敞开的第二敞口45。进一步地,第二敞口45能与对应的第一敞口63沿上下方向相对接。具体地,如图4所示,第一箱体51的第二敞口45能与第一回收管道57的第一敞口63沿上下方向相对接。如此当第一箱体51内异物99较多时,用于可以将第一箱体51从第二机架21内向上取出。在去除了异物99后。可以将第一箱体51放入第二机架21内,以使第一箱体51的第二敞口45与第一回收管道57的第一敞口63沿上下方向相对接,如此简化了用户去除第一箱体51内的异物99的操作。如图4所示,第二箱体53的第二敞口45能与第二回收管道59的第一敞口63沿上下方向相对接。如此当第二箱体53内污水98较多时,用于可以将第二箱体53从第二机架21内向上取出。在去除了污水98后。可以将第二箱体53放入第二机架21内,以使第二箱体53的第二敞口45与第二回收管道59的第一敞口63沿上下方向相对接,如此简化了用户去除第二箱体53内的污水98的操作。
49.进一步地,清水箱39和回收箱55的重心在一条直线上。具体地,在本实施例中,该回收箱55为两个。如此清水箱39与两个回收箱55这三者的重心在一条直线上。例如如图5所示,清水箱39与两个回收箱55这三者之间均沿左右方向延伸的直线并列排布。如图6所示,清水箱39与两个回收箱55这三者之间,清水箱39与一个回收箱55之间沿左右方向延伸的直线并列排布。如此当用户需要从第二机架21上取出或者放入清水箱39和/或回收箱55时,清水箱39和/或回收箱55之间的排布方式能方便用户的取放操作。
50.在本实施方式中,第二机架21上设置有一个向上敞开的取放开口101,清水箱39和回收箱55可从此取放开口101取出或放入。如此当用户需要从第二机架21上取出或者放入清水箱39、第一箱体51和第二箱体53时,清水箱39与两个回收箱55之间的排布方式能方便用户的取放操作并同时不增大第二机架21的空间体积。具体地,如图4所示,该第二机架21
的顶壁上设置有向上敞开的取放开口101,清水箱39和回收箱55至少一个朝向取放开口101。更具体地,如图4所示,清水箱39朝向取放开口101。从而通过该取放开口101能将第二机架21上的清水箱39和回收箱55向上取出或者向下放入,进而该取放开口101方便用户的取放操作并不增大第二机架21的空间体积。进一步地,清水箱39和回收箱55之间在第二机架21的高度方向上至少两两有部份重叠。
51.进一步地,如图3、图4所示,第二机架21上能转动地设置有盖体30。该盖体30用于打开和关闭取放开口101。例如如图3所示,该盖体30关闭取放开口101,清水箱39无法通过该取放开口101向上取出。例如如图4所示,该盖体30打开取放开口101,清水箱39通过该取放开口101向上取出。
52.进一步地,第二机架21上还设置有分别与两个回收箱55相连的气流发生器43和动力机构69。例如如图3所示,气流发生器43设置于主体部23的上部左侧。动力机构69设置于第二回收管道59上。进一步地,气流发生器43用于向回收箱55内产生气流的吸力以能将异物99吸入回收箱55内;动力机构69用于使得污水98能进入回收箱55内。具体地,该气流发生器43可以是第一风机。动力机构69可以是抽水泵。
53.进一步地,第一箱体51内设置有用于打开和关闭其上的第二敞口45的第二阀门71。例如如图3所示,第二阀门71设置于第一箱体51的底部。该第二阀门71用于控制第一箱体51内的异物99的流出。从而可以在将第一箱体51从第二机架21上取出前关闭第二阀门71,以避免异物99从第二敞口45流出。当第一箱体51与第一回收管道57相连时,可以打开第二阀门71,以允许异物99从第二敞口45流入第一箱体51内。
54.进一步地,第二箱体53内设置有用于打开和关闭其上的第二敞口45的第三阀门73。例如如图3所示,第三阀门73设置于第二箱体53的底部。该第三阀门73用于控制第二箱体53内的污水98的流出。从而可以在将第二箱体53从第二机架21上取出前关闭第三阀门73,以避免污水98从第二敞口45流出。当第二箱体53与第二回收管道59相连时,可以打开第三阀门73,以允许污水98从第二敞口45流入第二箱体53内。
55.进一步地,第二机架21上设置有用于与集尘盒13相连通;进而将异物99回收至回收箱55内的开口。例如如图3所示,该开口设置于停靠面上。且该开口与第一回收管道57的下端相连通。进一步地,开口向上敞开,以使清洁机器人能在清洗槽33的上方停靠。具体地,当清洁机器人停靠在停靠面上时,该开口与清洁机器人的集尘盒13相连通,进而使得集尘盒13内的异物99能通过该开口进入第一回收管道57内,并最终进入第一箱体51内。如此一方面当清洁机器人停放于停放面31上时,该第一机架11上的集尘盒13能与开口相连通;另一方面,能节省第二机架21内的空间,方便操作。
56.进一步地,图7示出了本技术实施方式所提供的主基站的第二实施例。下面结合图7,详细描述该第二实施例。
57.具体地,在本实施例中,回收装置包括一个回收箱55和与回收箱55相连通的三通阀75。该三通阀75用于使回收箱55轮流与清洗槽33和集尘盒13相连通,以使回收箱55能轮流回收污水98和异物99。也即该回收箱55既用于回收清洗槽33内的污水98,又用于回收集尘盒13内的异物99。具体地,第二机架21上设置有与回收箱55相连的气流发生器43。例如如图7所示,气流发生器43设置于主体部23的上部左侧。且气流发生器43与回收箱55相连通。进一步地,气流发生器43用于向回收箱55内产生气流的吸力以能将异物99和污水98吸入回
收箱55内。具体地,该气流发生器43可以是第二风机。
58.进一步地,为了保证气流发生器43对于污水98和异物99的吸取效率,气流发生器43对集尘盒13内的异物99的吸取和对于清洗槽33内污水98的吸取不能并行进行,而应该先后进行。也即回收箱55轮流回收异物99和污水98。
59.进一步地,三通阀75包括阀体和设置于阀体内的阀芯。该阀体具有第一流道83、第二流道85和第三流道87。例如如图8、图9所示,阀体包括竖直延伸的第一延伸段77、第二延伸段79和第三延伸段81。该第一延伸段77位于第二延伸段79和第三延伸段81之间。第二延伸段79位于第三延伸段81的右侧。第一流道83、第二流道85和第三流道87分别设置于第一延伸段77、第二延伸段79和第三延伸段81内。进一步地,该阀芯具有圆弧形的连接管89。该阀芯具有通过连接管89连通第一流道83和第二流道85的第一工作状态以及通过连接管89连通第一流道83和第三流道87的第二工作状态。例如如图8所示,阀芯处于第一工作状态。第一流道83与第二流道85通过圆弧形的连接管89相连通。如此气流发生器43所产生的的气流在第一流道83与第二流道85内流通时几乎不存在能量损耗,如此保证气流运行的通畅,提高回收箱55的回收异物99的效率。如图9所示,阀芯处于第二工作状态。第一流道83与第三流道87通过圆弧形的连接管89相连通。如此气流发生器43所产生的气流在第一流道83与第三流道87内流通时几乎不存在能量损耗,如此保证气流运行的通畅,提高回收箱55的回收污水98的效率。
60.进一步地,该第一延伸段77的上端用于与回收箱55相连通。第三延伸段81的左端用于与清洗槽33相连通。第二延伸段79的右端用于与集尘盒13相连通。如此当阀芯处于第一工作状态时,回收箱55能通过三通阀75与集尘盒13相连通,进而回收箱55能回收集尘盒13内的异物99。当阀芯处于第二工作状态时,回收箱55能通过三通阀75与清洗槽33相连通,进而回收箱55能回收清洗槽33内的污水98。也即能通过三通阀75使得回收箱55轮流回收异物99和污水98。
61.进一步地,第二机架21上还设置有两个回收管道。例如如图7所示,两个回收管道例如分别为位于左侧的第一回收管道57和位于右侧的第二回收管道59。进一步地,两个回收管道的一端分别用于与集尘盒13和清洗槽33相连通。例如如图7所示,第一回收管道57的下端与集尘盒13相连通。第二回收管道59的下端与清洗槽33相连通。进一步地,两个回收管道的另一端用于分别与第二流道85和第三流道87相连通;以使第一流道83能轮流回收清洗槽33内的污水98和集尘盒13内的异物99。例如如图7所示,第一回收管道57的上端用于与第二流道85相连通。第二回收管道59的上端用于与第三流道87相连通。
62.进一步地,三通阀75位于回收箱55的下方。如图8、图9所示,第一流道83具有向上敞开的第一连接口91。回收箱55具有向下敞开的第二连接口93。例如如图7所示,回收箱55的底部具有向下敞开的第二连接口93。进一步地,第二连接口93能与第一连接口91沿上下方向相对接。如此当回收箱55内异物99和/或污水98较多时,用于可以将回收箱55从第二机架21内向上取出。在去除了异物99和/或污水98后,可以将回收箱55放入第二机架21内,以使回收箱55的第二连接口93与第一流道83的第一连接口91沿上下方向相对接,如此简化了用户去除回收箱55内的异物99和/或污水98的操作。
63.进一步地,清水箱39和回收箱55的重心在一条直线上。具体地,在本实施例中,该回收箱55为1个。如此清水箱39与1个回收箱55这两者的重心在一条直线上。例如如图7所
示,清水箱39与回收箱55沿左右方向延伸的直线并列排布。如此当用户需要从第二机架21上取出或者放入清水箱39和/或回收箱55时,清水箱39和/或回收箱55之间的排布方式能方便用户的取放操作。
64.在本实施方式中,第二机架21上设置有一个向上敞开的取放开口101,清水箱39和回收箱55可从此取放开口101取出或放入。如此当用户需要从第二机架21上取出或者放入清水箱39、第一箱体51和第二箱体53时,清水箱39与两个回收箱55之间的排布方式能方便用户的取放操作并同时不增大第二机架21的空间体积。具体地,该第二机架21的顶壁上设置有向上敞开的取放开口101,清水箱39和回收箱55至少一个朝向取放开口101。从而通过该取放开口101能将第二机架21上的清水箱39和回收箱55向上取出或者向下放入,进而该取放开口101方便用户的取放操作并不增大第二机架21的空间体积。进一步地,清水箱39和回收箱55之间在第二机架21的高度方向上有部份重叠。
65.进一步地,如图7所示,第二机架21上能转动地设置有盖体30。该盖体30用于打开和关闭取放开口101。例如如图7所示,该盖体30关闭取放开口101,清水箱39无法通过该取放开口101向上取出。
66.进一步地,第二机架21上设置有用于与集尘盒13相连通;进而将异物99回收至回收箱55内的开口。例如如图7所示,该开口设置于停靠面上。且该开口与第一回收管道57的下端相连通。进一步地,开口向上敞开,以使清洁机器人能在清洗槽33的上方停靠。具体地,当清洁机器人停靠在停靠面上时,该开口与清洁机器人的集尘盒13相连通,进而使得集尘盒13内的异物99能通过该开口进入第一回收管道57内,并最终进入第一箱体51内。如此一方面当清洁机器人停放于停放面31上时,该第一机架11上的集尘盒13能与开口相连通;另一方面,能节省第二机架21内的空间,方便操作。
67.进一步地,如图7所示,1个回收箱55设置于停放部29的上方。如此清洁机器人停靠于停放部29上时,清洁机器人位于1个回收箱55的下方。进而能节省第二机架21内的空间。
68.进一步地,回收箱55内设置有分离装置27。该分离装置27在气流的流动方向上位于气流发生器43的下游。例如如图7所示,分离装置27位于回收箱55内。气流发生器43位于回收箱55外。气流自下向上移动通过回收箱55朝向回收箱55外流动。进一步地,分离装置27用于将气体从污水98和异物99中分离出来。具体地,该分离装置27可以是水气分离装置27。该水气分离装置27的工作原理是通过在其流通道中设置流动障碍,让空气、水、固体的混合物与障碍产生碰撞,因空气、水、固体的混合物质量不同,碰撞后他们的运动速度产生不同的变化,进而产生分离,分离出的水和固体保留在回收箱55内,而气体朝向回收箱55的外部流动。
69.进一步地,回收箱55内设置有安全截止阀97。例如如图7所示,安全截止阀97设置于分离装置27的上方。该安全截止阀97用于在污水98达到预定量后,发出控制信号,以使气流发生器43能根据控制信号进行关闭。具体地,为了防止回收箱55内的污水98过量后污染过滤器,该回收箱55内还设置有安全截止阀97。从而在污水98达到预定量后,能发出控制信号;进而使气流发生器43进行关闭,如此避免气流发生器43对集尘盒13和清洗槽33进行抽吸。更具体地,该安全截止阀97可以是浮阀。当污水98量达到一定高度后,浮阀在浮力作用下上浮将气路堵死,同时触发传感器发出控制信号。当然该安全截止阀97不限于为浮阀,还可以是浮标传感器。当污水98量达到一定高度后,浮标传感器在浮力作用下上浮至截止位
并发出控制信号。
70.进一步地,还包括:与安全截止阀97电连接的控制器。该控制器用于接收控制信号,并根据控制信号控制气流发生器43的关闭。
71.在本实施方式中,本技术一种实施方式提供的清洁机器人系统,包括如上所述的主基站和清洁机器人,所述清洁机器人包括:第一机架11;安装于所述第一机架11上的集尘盒13和/或清洁件15。
72.需要说明的是,在本实用新型的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
73.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。