1.本实用新型涉及清洁机器人领域,具体涉及一种基于动态平衡布局的清洁机器人。
背景技术:
2.近年来,随着社会经济的发展以及家庭生活水平的提高,家居等各种场所清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人能够将人们从家居等各种场所清洁工作中解放出来,有效减轻人们在家居等各种场所清洁方面的工作负担,缓解人们在进行家居等各种场所清洁过程中的劳累程度。
3.清洁机器人具有电控箱(电控箱包括感应器、控制器、操作屏幕和摄像头等),这些电控箱通常是设置在清洁机器人的内部,如专利号为201921202806.3的实用新型专利公开了一种便于快速打开维修的清洁机器人,该清洁器件人上的电控箱是罩设在水箱内部的,当需要对电控箱进行维修时,则需要翻转水箱,使用不便。如将电控箱设于外部,则清洁机器人的重心就会发生偏移,由于清洁机器人的底座大都是由三个轮子组成的移动结构,清洁机器人就容易发生侧翻,此时,需要通过增加配重块对清洁机器人重心重新定位。
4.然而,通过增加配重块来调节扫地机器人的重心的方式存在如下缺点:增加整机的重量,从而间接影响整机的使用性,例如增加耗电量、减小续航时间;增加整机成本,减小产品的装配效率;在带有水箱的扫地机器人中,水箱水量的多少,会引起整机重心位置的移动,也导致扫地机器人出现不平衡。
技术实现要素:
5.为了克服上述现有技术的缺陷,本实用新型所要解决的技术问题是提供一种基于动态平衡布局的清洁机器人,无需配重块也能使将电控箱设置在外部的清洁机器人保持平衡。
6.为了解决上述技术问题,本实用新型采用的技术方案为:
7.一种基于动态平衡布局的清洁机器人,包括底座、电控箱、用于存放东西的容纳箱和三个轮子,所述容纳箱设置在底座上表面,三个所述轮子设置在底座下表面且呈三角形分布,所述电控箱设置在底座上表面且与容纳箱并排设置,所述电控箱和容纳箱形成一体且重心位置位于所述三角形中心点附近所在的竖直线上。
8.进一步的,所述电控箱和容纳箱形成一体的重心位置所在的竖直线位于以所述三角形中心点为圆心的圆内,所述圆的直径范围为小于或等于100mm。
9.进一步的,所述容纳箱内设有至少一个容纳腔,当所述容纳箱内设置多个容纳腔时,多个所述容纳腔位于同一竖直线上。
10.进一步的,所述容纳箱为水箱。
11.进一步的,所述容纳箱内设有第一蓄水槽和第二蓄水槽,所述第一蓄水槽和第二蓄水槽位于同一竖直线上,所述第一蓄水槽设有出水组件,所述第二蓄水槽设有将第一蓄
水槽喷洒于地板上的水重新回收至第二蓄水槽内的吸附组件。
12.进一步的,所述电控箱设于所述底座的一端,所述容纳箱占据所述底座上剩余的空间。
13.进一步的,所述电控箱和容纳箱均为类矩形结构。
14.本实用新型的有益效果在于:
15.采用该技术方案,将电控箱设于的清洁机器人的外部,并通过将电控箱和容纳箱的整体重心设于三个轮子方位上形成的三角形的中心点附近所在的竖直线上,可以无需配重块也能使清洁机器人保持平衡。本实用新型通过对电控箱位置的设计,便于对电控箱的维修,再通过对清洁机器人整体重量的设计,使本实用新型的清洁机器人无需配重块也能保持平衡。
附图说明
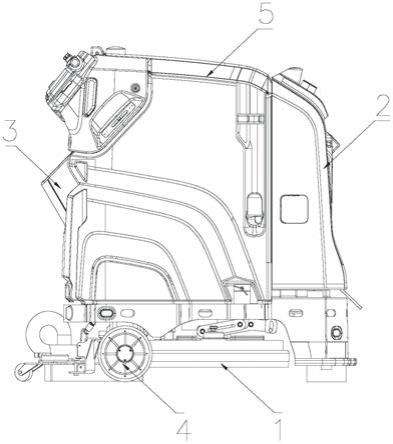
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的仰视图;
18.标号说明:
19.1、底座;2、电控箱;3、容纳箱;4、轮子;5、容纳腔。
具体实施方式
20.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
21.参照图1和图2,一种基于动态平衡布局的清洁机器人,包括底座1、电控箱2、用于存放物品的容纳箱3和三个轮子4,所述容纳箱3设置在底座1上表面,三个所述轮子4设置在底座1下表面且呈三角形分布,所述电控箱2设置在底座1上表面且与容纳箱3并排设置,所述电控箱2和容纳箱3形成一体且重心位置位于所述三角形中心点附近所在的竖直线上。三角形的形状根据底座1、电控箱2和容纳箱3的形状而定,或根据电控箱2和容纳箱3在底座1上的位置而定,如将电控箱2设于底座1的前面,容纳箱3设于底座1的后面,则可以将三角形的形状设置成等腰三角形的结构,等腰三角形的中心为三角形三条边上中点连线的交点。
22.使用原理:
23.将电控箱2设于清洁机器人的外部,并通过将电控箱2和容纳箱3的整体重心设于三个轮子4方位上形成的三角形的中心点附近的竖直线上,可以无需配重块也能使清洁机器人保持平衡。本实用新型通过对电控箱2位置的设计,便于对电控箱2的维修,再通过对清洁机器人整体重量的设计,使本实用新型的清洁机器人无需配重块也能保持平衡。
24.参照图1和图2,本技术方案的电控箱2和容纳箱3形成一体的重心位置所在的竖直线位于以所述三角形中心点为圆心的圆内,所述圆的直径范围为小于或等于100mm。
25.采用该技术方案,将电控箱2和容纳箱3形成一体的重心落在这一范围内,可以使清洁机器人保持较平稳的状态,虽然将电控箱2和容纳箱3形成一体的重心位置所在的竖直线落于三角形的中心点所在位置上最佳,但是清洁机器人的重量较重,即使重心位置稍有偏差,对清洁机器人的整体平衡并不会有影响,而将电控箱2和容纳箱3形成一体的重心落在以三角形中心点为圆心的圆内,可以使清洁机器人保持较平稳的状态同时,也便于对电
控箱2和容纳箱3在底座1上的位置做出更加合理的设计。
26.参照图1,本技术方案的容纳箱3内设有至少一个的容纳腔5,当所述容纳箱3内设置多个容纳腔5时,多个所述容纳腔5位于同一竖直线上,即多个容纳腔5在容纳箱3内从下至上依次排列,容纳腔5的数量根据使用情况而定,如可以设置两个容纳腔5,一个容纳腔5用于存放液体,另一个容纳腔5用于存储固体垃圾或其它清洁用的物品。
27.采用该技术方方案,假设将多个容纳腔5分别设置在容纳箱3上的同一水平面,如多个容纳腔5存储的物体重量不一致,可能会使清洁机器人的重心发生变化,将多个容纳腔5设于容纳箱3上的同一竖直线上的不同高度,则能解决上述产生的问题。
28.参照图1,本技术方案的所述容纳箱3为水箱,当然容纳箱3也可以是用于存放固体的箱体结构。进一步的本,本实施方式的所述容纳箱3内设有第一蓄水槽(图中未视出)和第二蓄水槽(图中未视出),所述第一蓄水槽(图中未视出)和第二蓄水槽(图中未视出)位于同一竖直线上,所述第一蓄水槽(图中未视出)设有出水组件(图中未视出),出水组件(图中未视出)如喷头,所述第二蓄水槽(图中未视出)设有将第一蓄水槽(图中未视出)喷洒于地板上的水重新回收至第二蓄水槽(图中未视出)内的吸附组件(图中未视出),吸附组件(图中未视出)如可以采用具有吸力的吸盘,并用水管与第二蓄水槽(图中未视出)连通,出水组件(图中未视出)设于所述清洁机器人的前方,所述吸附组件设于所述清洁机器人的后方。采用该技术方案,其一,吸附组件(图中未视出)可以将地面上的污水回收,其二,通过将污水回收,可以尽量减少水位变化对容纳箱3重量的影响,即尽量减小对电控箱2和容纳箱3整体中心的影响。
29.参照图1,本技术方案的电控箱2设于底座1的一端,容纳箱3占据底座1上剩余的空间。
30.采用该技术方案,可以尽可能充分的利用底座1上的空间,以增大容纳箱3的体积的同时,使本实用新型的结构更加紧凑。
31.参照图1,本技术方案的电控箱2和容纳箱3均为类矩形结构。
32.采用类矩形结构的电控箱2和容纳箱3,便于对电控箱2和容纳箱3整体重心的设计布局。
33.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。