斜坡清洁幕墙机械人
【技术领域】
1.本发明涉及机械人技术领域,尤其涉及斜坡清洁幕墙机械人。
背景技术:
2.机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.但是现在市面上的大部分的清洗墙面的机器人不能对斜面进行清洗,且在清洗时需要压在玻璃幕墙上且对玻璃幕墙不造成损害,这样就导致清洗机器人功能单一,实用性低。
4.因此,现有技术存在不足,需要改进。
技术实现要素:
5.为克服上述的技术问题,本发明提供了一种斜坡清洁幕墙机械人。
6.本发明解决技术问题的方案是提供一种斜坡清洁幕墙机械人,包括清洁架,所述清洁架的相对外侧转动连接有平衡支架,所述平衡支架的相对内侧设置有平衡配重,所述清洁架的相对内侧设置有固定架,所述充气轮子的上方设置有主清洁旋转头,所述固定架的底端固定连接有驱动马达,所述驱动马达的驱动端通过传动皮带与主清洁旋转头传动连接,所述主清洁旋转头的两端设置有侧清洁毛刷。
7.优选地,所述清洁架的两侧开设有小孔,所述小孔设置有若干个。
8.优选地,所述平衡支架的相对内侧均设置有压重角度调节连杆。
9.优选地,所述清洁架的两侧设置有充气轮子。
10.优选地,所述清洁架的顶端设置有吊点支架,所述吊点支架的顶端设置有牵引绳。
11.优选地,所述吊点支架的一侧设置有螺旋桨保护罩,所述螺旋桨保护罩的内侧设置有吊点调整螺旋桨。
12.优选地,所述固定架的一侧滑动有压缩弹簧导杆,所述压缩弹簧导杆的外侧设置有弹簧。
13.优选地,所述清洁架的两侧设置有支架,所述主清洁旋转头设置于支架的顶端。
14.优选地,所述压缩弹簧导杆转动连接于支架的一侧。
15.优选地,所述主清洁旋转头的直径设置为100-150cm。
16.相对于现有技术,本发明的斜坡清洁幕墙机械人具有如下优点:
17.通过在平衡支架的一侧设置的平衡配重,在平衡配重的内部可以将变压器或者其他控制设置在内部,这样可以与主清洁旋转头形成平衡压重的作用,压重角度调节连杆转动连接于清洁架的两侧,清洁架的两侧开设有若干个圆孔,将清洁架和平衡支架调整好角度之后,通过压重角度调节连杆将清洁架和平衡支架之间的角度固定,然后主清洁旋转头就可以开始工作,这样可以达到平衡的效果,便于对斜坡墙面清洁。
18.通过设置主清洁旋转头,在清洁架的两侧设置有充气轮子,充气轮子与墙面进行
接触,而充气轮子采用的使充气方式的轮子,所以不会对墙面造成损坏,将主清洁旋转头压向墙面,便于对墙面清洁,在主清洁旋转头的两侧设置有侧清洁毛刷,侧清洁毛刷可以清洗到墙面直角的位置,在主清洁旋转头的相对内侧固定连接有固定架,固定架的一侧设置有压缩弹簧导杆,压缩弹簧导杆的外侧设置有弹簧,主清洁旋转头压向玻璃幕墙的压力通过压缩弹簧导杆和弹簧调整,在斜坡清洁的时候将平衡配重缩短后仰把其位置调整到充气轮子的后面,互相形成平衡状态即可,这样便于达到斜坡清洁的效果。
19.通过在主清洁旋转头的顶端设置的吊点支架,在吊点支架的一侧设置有吊点调整螺旋桨,吊点支架的顶端设置有牵引绳,通过牵引绳可以拉住机械人,使其可以在玻璃幕墙的表面上下移动工作,也可以使其横向移动对玻璃幕墙清洁,因为充气轮子为充气式轮胎,所以机械人在横向移动时,不会对玻璃幕墙造成损害,在主清洁旋转头的下方设置有驱动马达,驱动马达的驱动端通过传动皮带与主清洁旋转头的外侧传动连接,这样可以使其达到在斜坡上清洁的效果。
【附图说明】
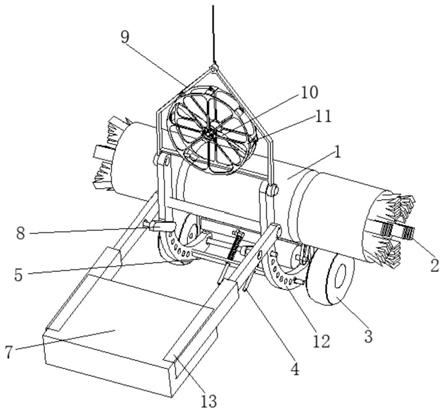
20.图1为本发明斜坡清洁幕墙机械人的立体结构示意图。
21.图2为本发明斜坡清洁幕墙机械人的主视结构示意图。
22.图3为本发明斜坡清洁幕墙机械人的左右轴测立体结构示意图。
23.图4为本发明斜坡清洁幕墙机械人的上下轴测立体结构示意图。
24.附图标记说明:
25.主清洁旋转头1、侧清洁毛刷2、充气轮子3、压缩弹簧导杆4、固定架5、驱动马达6、平衡配重7、压重角度调节连杆8、吊点支架9、吊点调整螺旋桨10、螺旋桨保护罩11、清洁架12、平衡支架13。
【具体实施方式】
26.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施实例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
27.请参阅图1-4,本发明提供一种技术方案:斜坡清洁幕墙机械人,包括清洁架12,清洁架12的相对外侧转动连接有平衡支架13,平衡支架13的相对内侧设置有平衡配重7,清洁架12的相对内侧设置有固定架5,充气轮子3的上方设置有主清洁旋转头1,固定架5的底端固定连接有驱动马达6,驱动马达6的驱动端通过传动皮带与主清洁旋转头1传动连接,主清洁旋转头1的两端设置有侧清洁毛刷2。
28.请参阅图3,清洁架12的两侧开设有小孔,小孔设置有若干个,平衡支架13的相对内侧均设置有压重角度调节连杆8,通过压重角度调节连杆8可以固定清洁架12和平衡支架13之间的角度。
29.请参阅图3,清洁架12的两侧设置有充气轮子3。
30.请参阅图2,清洁架12的顶端设置有吊点支架9,吊点支架9的顶端设置有牵引绳,通过牵引绳将机械人吊起或放下。
31.请参阅图3,吊点支架9的一侧设置有螺旋桨保护罩11,螺旋桨保护罩11的内侧设
置有吊点调整螺旋桨10,通过其产生风的推力调整吊点与墙面的距离。
32.请参阅图1,固定架5的一侧滑动有压缩弹簧导杆4,压缩弹簧导杆4的外侧设置有弹簧,弹簧可以通过其弹力对主清洁旋转头1形成压力,便于清洁玻璃幕墙。
33.请参阅图1,清洁架12的两侧设置有支架,主清洁旋转头1设置于支架的顶端,压缩弹簧导杆4转动连接于支架的一侧,便于调节主清洁旋转头1压向玻璃幕墙的压力,主清洁旋转头1的直径设置为100-150cm,可以更好的对玻璃幕墙清洁。
34.本发明的工作原理及使用流程:使用时,首先通过设置的主清洁旋转头1,在清洁架12的两侧设置有充气轮子3,充气轮子3与墙面进行接触,而充气轮子3采用的使充气方式的轮子,所以不会对墙面造成损坏,将主清洁旋转头1压向墙面,便于对墙面清洁,在主清洁旋转头1的两侧设置有侧清洁毛刷2,侧清洁毛刷2可以清洗到墙面直角的位置,在主清洁旋转头1的相对内侧固定连接有固定架5,固定架5的一侧设置有压缩弹簧导杆4,压缩弹簧导杆4的外侧设置有弹簧,主清洁旋转头1压向玻璃幕墙的压力通过压缩弹簧导杆4和弹簧调整,然后通过在平衡支架13的一侧设置的平衡配重7,在平衡配重7的内部可以将变压器或者其他控制设置在内部,这样可以与主清洁旋转头1形成平衡压重的作用,压重角度调节连杆8转动连接于清洁架12的两侧,清洁架12的两侧开设有若干个圆孔,将清洁架12和平衡支架13调整好角度之后,通过压重角度调节连杆8将清洁架12和平衡支架13之间的角度固定,然后主清洁旋转头1就可以开始工作,这样可以达到平衡的效果,便于对斜坡墙面清洁,在斜坡清洁的时候将平衡配重7缩短后仰把其位置调整到充气轮子3的后面,互相形成平衡状态即可,最后可以通过在主清洁旋转头1的顶端设置的吊点支架9,在吊点支架9的一侧设置有吊点调整螺旋桨10,吊点支架9的顶端设置有牵引绳,通过牵引绳可以拉住机械人,使其可以在玻璃幕墙的表面工作,也可以使其横向移动对玻璃幕墙清洁,因为充气轮子3为充气式轮胎,所以机械人在横向移动时,不会对玻璃幕墙造成损害,在主清洁旋转头1的下方设置有驱动马达6,驱动马达6的驱动端通过传动皮带与主清洁旋转头1的外侧传动连接,这样可以使其达到在斜坡上清洁的效果,便于达到多种角度清洁的效果,实用性强。
35.以上所述仅为本发明的较佳实施例,并非因此限制本发明的专利范围,凡是在本发明的构思之内所作的任何修改,等同替换和改进等均应包含在本发明的专利保护范围内。