1.本发明涉及幕墙检测清洁领域,特别是指一种幕墙自动化检测清洁装置。
背景技术:
2.幕墙是建筑的外墙围护,不承重,像幕布一样挂上去,故又称为"帷幕墙",是现代大型和高层建筑常用的带有装饰效果的轻质墙体。由面板和支承结构体系组成的,可相对主体结构有一定位移能力或自身有一定变形能力、不承担主体结构所作用的建筑外围护结构或装饰性结构。
3.建筑装饰幕墙早在150年前(19世纪中叶)就已在建筑工程中使用,由于受当时材料和加工工艺的局限,幕墙达不到绝对水密性、气密性、抵抗各种自然外力的侵袭(如风、地震、气温)、热物理因素(热辐射、结露)以及隔音、防火等要求,一直得不到很好的发展及推广。
4.自20世纪50年代以来,由于建筑材料及加工工艺的迅速发展,各种类型的建筑材料研制成功,如各种密封胶的发明及其它隔声、防火填充材料的出现,很好地解决了建筑外围对幕墙的指标要求,并逐渐成为当代外墙建筑装饰新潮流。今天,幕墙不仅广泛用于各种建筑物的外墙,还应用于各种功能的建筑内墙,如通信机房、电视演播室、航空港(机场)、大车站、体育馆、博物馆、文化中心、大酒店、大型商场等。今后,由于幕墙工艺与科技的结合,响应全球节能减排的号召,智能型幕墙,如太阳能光伏幕墙、通风道呼吸幕墙、感应风雨智能幕墙等,将展示出建筑的独特魅力。
5.幕墙是独立单元属性比较强的结构,大部分的室外幕墙结构具有的最大好处是可以单独独立替换。但是由于需要人工高空作业,针对幕墙的检修或清洁成本就会比较高且频率较低。如何提供一种自动化程度高的,可以针对幕墙类产品进行检测清洁的设备单元,是我们需要研究的方向。
技术实现要素:
6.本发明提出一种幕墙自动化检测清洁装置,解决了现有技术中的问题。
7.本发明的技术方案是这样实现的:
8.幕墙自动化检测清洁装置,包括多极转动的机械手,所述机械手转动地安装在一个底座上,所述底座内安装有与多极直线模组组件连接的主机座,所述机械手的自由端通过电磁铁连接转动式盘座,所述盘座下部转动连接有可安装检测模块和清洁模块的安装座板,所述盘座侧部对称安装有弯折臂。
9.作为本发明的优选方案,所述主机座上部转动连接有主转盘,所述主转盘上设置有机座电机,所述机座电机驱动所述主转盘相对于主机座转动;所述机械手固定在所述主转盘上。
10.作为本发明的优选方案,所述机械手包括有固定在底座上的第一连接座,所述第一连接座上转动连接有主机臂,所述第一连接座上设置有驱动主机臂转动的第一转动电
机,所述第一转动电机的驱动转轴水平设置。
11.作为本发明的优选方案,所述主机臂自由端安装有一个第二转动电机,所述第二转动电机上固定有相对于主机臂转动的第二连接座。
12.作为本发明的优选方案,所述第二连接座上转动连接有自由端臂,所述自由端臂通过设置在第二连接座上的第三转动电机驱动转动,所述自由端臂的自由端安装有电磁吸接头。
13.作为本发明的优选方案,所述盘座包括上下两平行设置的上固定板和下固定板,所述上固定板和下固定板之间通过若干连接杆连接固定,所述上固定板上部设置有上部安装腔结构,所述上部安装腔结构中部设置有竖直的转轴,转轴下部贯穿所述上固定板后与上转动电机联动,所述上转动电机固定在所述上固定板的下表面上。
14.作为本发明的优选方案,所述上部安装腔结构上顶面安装有主齿轮,所述主齿轮与所述转轴连接固定,在所述上部安装腔结构上顶面上安装有至少一个与所述主齿轮啮合的从动齿轮,所述上部安装腔结构上表面上设置有与机械手自由端磁吸连接的连接块,所述连接块通过贯穿上部安装腔结构的杆件与所述从动齿轮连接固定。
15.作为本发明的优选方案,所述下固定板下表面安装有安装盒,所述安装盒内设置有若干多级转动杆,同组的多级转动杆通过同步带联动,每一组多级转动杆组通过一个随动电机驱动转动。
16.作为本发明的优选方案,所述多级转动杆下部穿出所述安装盒,所述多极转动杆下部自由端连接有插接座,所述安装座板可拆卸的插接在所述插接座内。
17.作为本发明的优选方案,所述弯折臂包括固定在盘座侧部的竖直转轴电机,所述竖直转轴电机上联动有弯折座,所述弯折座自由端通过转轴电机联动有第一连接臂,所述第一连接臂通过转轴电机联动有第二连接臂,所述第二连接臂自由端设置有控制腔,所述控制腔的自由端安装有橡皮碗,所述控制腔内设置有与橡皮碗连接的吸气泵。
18.有益效果:
19.幕墙自动化检测清洁装置,包括多极转动的机械手,所述机械手转动地安装在一个底座上,所述底座内安装有与多极直线模组组件连接的主机座,所述机械手的自由端通过电磁铁连接转动式盘座,所述盘座下部转动连接有可安装检测模块和清洁模块的安装座板,所述盘座侧部对称安装有弯折臂。本发明提供一种可以通过机械手将安装检测清洁单元辅助贴敷至幕墙上,在通过检测清洁单元自身结构在幕墙上进行爬行,从而完成检测清洁的目的,是一种自动化程度较高,可以部分代替人工在较难到达区域完成检测和清洁任务的设备装置。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
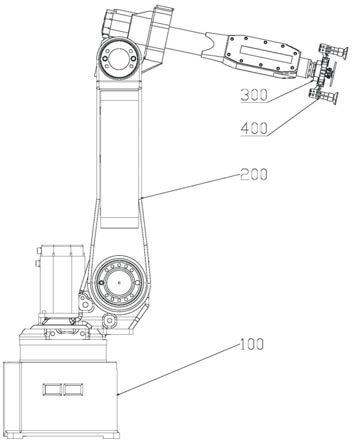
21.图1为本发明结构示意图;
22.图2为本发明底座机械手结构示意图;
23.图3为本发明盘座剖面结构示意图;
24.图4为本发明检测模块结构示意图。
25.图中,底座100,主机座101,机座电机102,主转盘103,机械手200,主机臂201,第一连接座202,第一转动电机203,电磁吸接头204,第二转动电机205,第二连接座206,第三转动电机207,自由端臂208,盘座300,上固定板301,下固定板302,上转动电机303,主齿轮304,从动齿轮305,连接块306,安装盒307,随动电机308,同步带309,多级转动杆310,安装座板311,插接座312,弯折臂400,竖直转轴电机401,弯折座402,第一连接臂403,第二连接臂404,吸气泵405,控制腔406,橡皮碗407。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例1
28.如图1图2所示的幕墙自动化检测清洁装置,包括多极转动的机械手200,机械手200转动地安装在一个底座100上,底座100内安装有与多极直线模组组件连接的主机座101。
29.本设计多极直线模组主要的作用是带动主机座101完成x轴方向和y轴方向的移动,带动整个检测清洁装置完成最基本的水平移动状态,中国专利号202120051878.3的一种成本较低的中低精度直线模组适用于本设计中的直线模组结构,其包括x向直线模组和安装在x向直线模组上的y向直线模组,x向直线模组包括桁架、安装在桁架上的槽钢、安装在槽钢上的x向滑动组件以及安装在桁架端部的x向传动机构,y向直线模组包括固定架、安装在固定架上的槽钢、安装在槽钢上的y向滑动组件以及安装在固定架端部的y向传动机构,y向直线模组上还安装有旋转台。x向传动机构包括电机、x向传动杆、安装在x向传动杆上的齿轮件和同步轮、安装在桁架上的紧固轮、用于连接电机和齿轮件的皮带以及用于传动的同步带。桁架有两个,且平行设置,两个桁架之间连接有连接架和固定支架,x向传动杆安装在固定支架的底部,其两端分别与两个桁架的端部连接,同步轮有四个,其中两个同步轮分别安装在x向传动杆的两端,另外两个同步轮分别安装在两个桁架的端部,电机安装在桁架的底部,齿轮件安装在x向传动杆的端部,皮带的两端分别连接电机和齿轮件,同步带穿过x向滑动组件的底部并与其固定连接,同步带的两端分别与桁架两端的同步轮连接,紧固轮分别安装在同步带底部的两端。槽钢安装在桁架上部的两侧,x向滑动组件包括滑动座、安装在滑动座上的固定杆以及安装在固定杆上的轴承,固定杆安装在滑动座的四端,轴承位于槽钢的内部。y向传动机构包括电机、y向传动杆、皮带、安装在y向传动杆上的同步轮和齿轮件、以及用于连接同步轮的同步带。y向传动杆和固定架各有两个,两个固定架呈平行设置,两个y向传动杆分别安装在两个固定架的两端,齿轮件安装在其中一个y向传动杆的端部,每个y向传动杆上都安装有两个同步轮,电机安装在固定架底部的端部,皮带的两端分别连接齿轮件和电机,同步带穿过旋转台的底部并与其固定连接,同步带的两端分别与两个y向传动杆上的同步轮连接。旋转台固定在y向滑动组件上,y向滑动组件包括底板、
安装在底板两端的固定杆、安装在固定杆上的轴承以及安装在底板上的底架,底板安装在y向直线模组的槽钢上,轴承位于槽钢内。
30.如图1图2中所示,机械手200的自由端通过电磁铁连接转动式盘座300,中国专利号201420012560.4的一种小型化比例电磁铁,可作为本机械手中的电磁铁的基础设计,其包括挡铁、连接环、衔铁、极靴、线圈和轭铁,挡铁内设有挡铁内孔、且左端设置有圆环状平面及具有特定角度的锥面,连接环内设有连接环内孔,极靴内设有极靴内孔,连接环位于挡铁与极靴之间,衔铁为圆柱形,线圈上设置有输入信号接插件,衔铁内设与衔铁外径不同心的通孔,衔铁与连接环内孔表面不接触,衔铁外圆柱面与挡铁内孔、极靴内孔均为0.01~0.03mm的间隙配合,小型化比例电磁铁最大外径不大于22mm、且长度不大于33mm。连接环为非导磁连接环,挡铁为软磁挡铁,挡铁设置有圆柱面用于和连接环实现过盈配合连接,极靴为软磁极靴,极靴设置有圆柱面用于和连接环实现过盈配合连接。衔铁为软磁衔铁,其表面设置有厚度为0.01~0.04mm的非导磁、摩擦系数低的耐磨层。挡铁和极靴表面均设有抗腐蚀和降低摩擦系数的抗腐蚀耐磨层。通过电磁铁的设计,盘座变成了一个可以随时剥离的独立模块,这种独立模块自身设置可以吸附在墙面上的吸附结构,使用起来非常灵活多变。
31.盘座300下部转动连接有可安装检测模块和清洁模块的安装座板311,在这里,检测模块的主要作用是检测前面的裂缝或不平整的部分,其技术实现也比较容易,中国专利号201921951809.7的一种低功耗桥梁表面裂缝检测系统,可以承载与检测模块上,其包括gnss定位系统、综合气象站、视频监测系统、车辆载重监测系统、服务器云平台、爬墙机器人和检测装置,所述gnss定位系统、综合气象站、视频监测系统、车辆载重监测系统通过gprs或4g与服务器云平台连接,将数据传递给服务器云平台,所述服务器云平台还连接所述爬墙机器人,所述爬墙机器人与所述检测装置有线或无线连接;爬墙机器人包括微处理器、存储模块、电源模块、定位模块、无线通讯模块、rs-485通信电路,所述微处理器分别与所述存储模块、电源模块、定位模块、无线通讯模块、rs-485通信电路连接;所述检测装置包括裂缝观测仪、锈蚀检测仪、索力动测仪、拍摄装置和照明装置;所述裂缝观测仪、锈蚀检测仪、索力动测仪均和照明装置与所述爬墙机器人有线连接,所述拍摄装置通过wifi或蓝牙与所述爬墙机器人无线连接。这里的爬墙机器人可以用盘座及其连接的弯折臂组来代替。
32.如图3凸4中的盘座300侧部对称安装有弯折臂400。
33.本设备可以在室外使用也可以在室内进行外伸动作,通过电磁铁的特性连接盘座,待盘座300位置放定,弯折臂内的橡皮碗通过吸气泵405的协助,使检测清洁单元“吸附”在幕墙上,通过控制模块控制弯折臂交替完成行走动作。在安装座板311内安装适应性的检测设备或者清洁设备,完成对应的检测清洁动作。
34.检测清洁单元内安装控制模块,包括相连接的控制电路、供电电路、mcu、信号收发装置等模块,为现有技术中存在的控制方案,具体结构不赘述。
35.主机座101上部转动连接有主转盘103,主转盘103上设置有机座电机102,机座电机102驱动主转盘103相对于主机座101转动;机械手200固定在主转盘103上。
36.机械手200包括有固定在底座100上的第一连接座202,第一连接座202上转动连接有主机臂201,第一连接座202上设置有驱动主机臂201转动的第一转动电机203,第一转动电机203的驱动转轴水平设置。
37.主机臂201自由端安装有一个第二转动电机205,第二转动电机205上固定有相对
于主机臂201转动的第二连接座206。
38.第二连接座206上转动连接有自由端臂208,自由端臂208通过设置在第二连接座206上的第三转动电机207驱动转动,自由端臂208的自由端安装有电磁吸接头204。
39.实施例2
40.如图1图2所示的幕墙自动化检测清洁装置,包括多极转动的机械手200,机械手200转动地安装在一个底座100上,底座100内安装有与多极直线模组组件连接的主机座101,机械手200的自由端通过电磁铁连接转动式盘座300,盘座300下部转动连接有可安装检测模块和清洁模块的安装座板311,盘座300侧部对称安装有弯折臂400。
41.如图3中盘座300包括上下两平行设置的上固定板301和下固定板302,上固定板301和下固定板302之间通过若干连接杆连接固定,上固定板301上部设置有上部安装腔结构,上部安装腔结构中部设置有竖直的转轴,转轴下部贯穿上固定板301后与上转动电机303联动,上转动电机303固定在上固定板301的下表面上。
42.上部安装腔结构上顶面安装有主齿轮304,主齿轮304与转轴连接固定,在上部安装腔结构上顶面上安装有至少一个与主齿轮304啮合的从动齿轮305,上部安装腔结构上表面上设置有与机械手200自由端磁吸连接的连接块306,连接块306通过贯穿上部安装腔结构的杆件与从动齿轮305连接固定。
43.下固定板302下表面安装有安装盒307,安装盒307内设置有若干多级转动杆310,同组的多级转动杆310通过同步带309联动,每一组多级转动杆310组通过一个随动电机308驱动转动。在多级转杆外壁上,沿轴向设置若干同心的卡槽,卡槽的作用是限制同步带的位置,每个相邻同组的多级转动杆上设置相同位置的卡槽,同时配备一个驱动一级转动杆转动的电机,这里的一级转动杆由多级转动杆中选出。
44.多级转动杆310下部穿出安装盒307,多极转动杆下部自由端连接有插接座312,安装座板311可拆卸的插接在插接座312内。
45.如图1所示的幕墙自动化检测清洁装置,包括多极转动的机械手200,机械手200转动地安装在一个底座100上,底座100内安装有与多极直线模组组件连接的主机座101,机械手200的自由端通过电磁铁连接转动式盘座300,盘座300下部转动连接有可安装检测模块和清洁模块的安装座板311,盘座300侧部对称安装有弯折臂400。
46.实施例3
47.如图4中的弯折臂400,弯折臂400包括固定在盘座300侧部的竖直转轴电机401,竖直转轴电机401上联动有弯折座402,弯折座402自由端通过转轴电机联动有第一连接臂403,第一连接臂403通过转轴电机联动有第二连接臂404,第二连接臂404自由端设置有控制腔406,控制腔406的自由端安装有橡皮碗407,控制腔406内设置有与橡皮碗407连接的吸气泵405。
48.中国专利号201720844096.9的吸附爬行机构和吸附玻璃幕墙的清洗机器人,其行走逻辑与本设计中的行走逻辑蕾西,其具体包括至少一个爬行装置,爬行装置包括驱动装置、伸缩机械腿和移动支撑机架,其中:伸缩机械腿的数目为两个以上个,且伸缩机械腿沿移动支撑机架的周向方向分布在移动支撑机架上;驱动装置与伸缩机械腿驱动连接且能驱动伸缩机械腿相对于移动支撑机架沿垂直于清洗面的方向移动至吸附于清洗面的位置以及脱离清洗面的位置,并驱动伸缩机械腿绕移动支撑机架沿平行于清洗面的方向转动且在
移动、转动过程中带动吸附爬行机构在清洗面上沿直线方向以及曲线方向爬行,解决现有技术中存在的吸附幕墙的清洗装置移动不灵活的技术问题,通过改变伸缩机械腿吸附清洗面的状态以及驱动伸缩机械腿在移动支撑机架上转动,实现吸附爬行机构在清洗面上能够做直线运动和能够转弯,实现吸附幕墙的清洗机器人移动灵活。
49.作为可选地实施方式,驱动装置包括发动机和链条传动机构,发动机位于移动支撑机架上,链条传动机构绕设在移动支撑机架上;发动机能通过链条传动机构带动移动支撑机架沿平行于清洗面的方向移动;驱动装置还包括空气压缩机和气缸;伸缩机械腿包括吸盘、气动阀和连接板,吸盘与气动阀连接,连接板连接气动阀与链条传动机构,气缸的活塞杆与气动阀连接;伸缩机械腿包括吸盘和气动阀,吸盘与气动阀连接,气缸的活塞杆与气动阀连接;气缸通过气动阀与空气压缩机连通,气动阀控制气缸实现吸盘以及气动阀沿垂直于清洗面的方向移动;吸盘通过气动阀与空气压缩机连通,气动阀控制吸盘吸附清洗面的状态。链条传动机构包括主动链轮、从动链轮和链条,其中:发动机驱动主动链轮转动,主动链轮通过链条带动从动链轮转动,主动链轮和从动链轮均设置在上支撑板与下支撑板之间。当吸盘需要吸附在清洗面上时,气动阀控制气缸,使得活塞杆带动气动阀和吸盘向清洗面的方向移动直到与清洗面接触,空气压缩机向气动阀和吸盘通入空气,此时,气动阀打开泄压,使得吸盘和气动阀内的空气快速离开气动阀和吸盘内,造成吸盘内成真空的状态,在外界大气压的作用下,使得吸盘吸附在清洗面上;当不需要吸盘吸附在清洗面上时,气动阀关闭泄压处,空气压缩机通过气动阀向吸盘内通入空气,直到吸盘与清洗面的吸附解除,然后在气动阀的控制下,气缸的活塞杆带动气动阀与吸盘往远离清洗面的方向移动。伸缩机械腿的数目可以为个,移动支撑机架的形状可以为肾形;吸附爬行机构向前爬行的过程中,伸缩机械腿能至少转动至移动支撑机架上的前位、中位和后位三个位置,吸附爬行机构做直线运动时,往那个方向移动即为前,吸附爬行机构做转动运动时,朝哪个方向转动即为前,其中:中位的伸缩机械腿吸附在清洗面上,前位的伸缩机械腿从与清洗面分离的状态转为吸附清洗面的状态,后位的伸缩机械腿从吸附清洗面的状态转为与清洗面分离的状态;后位的伸缩机械腿状态切换的时间点早于前位的伸缩机械腿;其余的伸缩机械腿处于与清洗面分离的状态,后位的伸缩机械腿状态切换与前位的伸缩机械腿状态切换两者的时间差使得驱动装置带动移动支撑机架向前运动。移动支撑机架包括上支撑板和与上支撑板连接的下支撑板,链条传动机构位于上支撑板与下支撑板之间。
50.爬行装置做直线运动时,中位的伸缩机械腿和后位的伸缩机械腿位于直线部上,前位的伸缩机械腿位于曲线部上,参见图,后位的伸缩机械腿从吸附清洗面的状态转为与清洗面分离的状态,主动链轮顺时针转动,由于中位的伸缩机械腿吸附在清洗面上,中位的伸缩机械腿通过连接板与链条连接,使得主动链轮沿着直线部上的链条向下转动,主动链轮带动移动支撑机架往图中箭头的方向移动,由于直线部的链条的长度减小,使得链条带动从动链轮顺时针转动,直到前位的伸缩机械腿转动到直线部处由与清洗面分离的状态转为吸附清洗面的状态且此时前位的伸缩机械腿变为中位的伸缩机械腿,伸缩机械腿连续上述变化,可使得爬行装置向图中箭头的方向移动;
51.爬行装置做转动运动时,中位的伸缩机械腿和后位的伸缩机械腿位于曲线部上,前位的伸缩机械腿位于直线部上,参见图,后位的伸缩机械腿从吸附清洗面的状态转为与清洗面分离的状态,主动链轮逆时针转动,由于中位的伸缩机械腿吸附在清洗面上,中位的
伸缩机械腿通过连接板与链条连接,使得主动链轮沿着曲线部上的链条向下转动,主动链轮带动移动支撑机架往图中箭头的方向转动,链条带动从动链轮转动,直到前位的伸缩机械腿转动到曲线部处由与清洗面分离的状态转为吸附清洗面的状态且此时前位的伸缩机械腿变为中位的伸缩机械腿,伸缩机械腿连续上述变化,可使得爬行装置向图中箭头的方向转动。
52.吸附爬行机构还包括机架,机架连接两个爬行装置且两个爬行装置之间有间隙。两个爬行装置的移动方向相同时,吸附爬行机构能发生移动或转动,例如:两个爬行装置同时向一个方向做直线运动,吸附爬行机构做直线移动;两个爬行装置向同一方向做曲线运动,吸附爬行机构做转弯移动。吸附爬行机构还包括控制装置,控制装置与气动阀电连接且控制装置控制气动阀。
53.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。