1.本实用新型属于家庭洗涤、清扫领域,具体涉及一种用于清洁机的刷头模块及清洁机。
背景技术:
2.目前的具有扫地功能的扫地清洁机包括吸尘器和扫地机器人,其主要采用刷扫方式,利用风机将地面杂物吸进入至其内部的收纳盒,从而完成地面清理的功能。
3.如中国实用新型专利《便携式吸尘器》,其专利号为zl201320814722.1(授权公告号为cn203597888u)公开了一种便携式吸尘器包括外壳,外壳的外壁顶部设有手柄,外壳内设有小电机、主动齿轮和若干从动齿轮,主动齿轮与小电机连接,从动齿轮与主动齿轮啮合,主动齿轮的输出轴上连接有吸尘扇片,各从动齿轮的输出轴上均连接有毛刷。上述专利中的吸尘器毛刷结构在转动的过程中实现了对地面的清理,但是在清扫过程中,头发容易缠绕在刷毛上,在清理毛刷时,需要将缠绕的毛发清理掉,增加了毛刷的清理难度。
4.目前对地面的毛发进行清理,如中国实用新型《一种毛发清理刷》,其专利号为 zl201620186914.6(授权公告号为cn205410228u)公开了一种毛发清理刷,包括刷杆,在所述刷杆的前端部设置有刷毛,在所述刷杆内设置有连接杆,所述连接杆的前端部设置有除毛栅,所述除毛栅上设置有让所述刷毛穿过的栅格;通过一动力源驱动所述连接杆沿所述刷杆的轴线移动,从而带动所述除毛栅沿刷毛移动。该专利中虽然实现了地面的毛发清理,但是,无法同时实现对灰尘和毛发同时进行清理。
5.因此,需要对现有的刷头模块作进一步的改进。
技术实现要素:
6.本实用新型所要第一个解决的技术问题是针对上述现有技术的现状,提供一种在吸尘的同时对缠绕的毛发进行清理的用于清洁机的刷头模块。
7.本实用新型所要第二个解决的技术问题是,提供了一种将刷头上的毛发梳理下来的刷头模块。
8.本实用新型所要第三个解决的技术问题是,提供了一种加速吸尘口处气流流速以达到提高清洁能力的刷头模块。
9.本实用新型所要第四个解决的技术问题是,提供了一种具有切割毛发功能的清洁机。
10.本实用新型解决上述第一个技术问题所采用的技术方案为:一种用于清洁机的刷头模块,包括有
11.外壳,其内部具有导风通道,所述导风通道具有吸尘口及与所述吸尘口流体连通的出风口,沿着气流流动路径,所述出风口位于所述吸尘口的下游;
12.刷头,用来对待清洁物体进行清扫,能转动地设置在所述导风通道内,包括有连接板及设置在所述连接板上的至少两排刷柱组,相邻两排所述刷柱组之间留有间隙;其特征
在于:还包括有
13.刀架,设置在所述连接板上,且位于所述间隙内,并随所述刷头一起转动,该刀架上设置有刀片;
14.联动机构,其动力输入端与所述连接板相传动连接,其动力输出端与所述刀架相驱动连接,从而带动所述刀架上的刀片在所述间隙内来回摆动。如此,对嵌入间隙内的毛发进行切割。
15.优选地,在所述吸尘口的开口处于朝下状态下,所述刷头的转动轴线沿着上下方向延伸,所述刀架基本水平布置,所述刀片在联动机构的驱动下基本水平来回运动地设置在所述间隙内。
16.联动机构的结构形式有多种,可以采用弹簧和刀架配合的形式,还可以采用导向槽和延伸杆配合的形式,但是优选地,所述联动机构包括有设置在所述连接板上且沿着所述刷头的转动轴线延伸的延伸杆,所述延伸杆有两根,且沿着所述刀架的长度方向间隔布置,并与所述刀架基本垂直,所述刀架上具有与所述延伸杆相对应且沿刀架的长度方向延伸的导向槽,所述延伸杆局部穿过对应的导向槽且滑动限位在该导向槽内。
17.为了提高刀架运动的稳定性,所述延伸杆的外周壁侧向凸设有沿其长度方向间隔布置的第一凸部和第二凸部,所述延伸杆位于所述第一凸部和第二凸部之间的部分始终位于所述导向槽内。
18.优选地,每排刷柱组均包括有多根沿着所述刷头的转动轴线延伸且间隔布置的刷柱,所述刷柱设置在所述连接板上。
19.本实用新型解决上述第二个技术问题所采用的技术方案为:还包括有用来驱动所述刀架相对所述连接板沿着所述刷头的转动轴线来回运动的传动组件,所述传动组件的动力输入端与所述刷头相传动连接,且该传动组件的动力输出端与所述刀架驱动连接。传动组件的动力输入端还可以为风力传动。
20.传动组件的结构形式有多种,但是优选地,所述传动组件包括有
21.固定板,连接在所述外壳的外壁上,且设置至少两个位于所述刷头的转动轴的外围且沿周向间隔布置的滑动件,在所述吸尘口的开口处于朝下状态下,所述固定板位于所述外壳之上,且滑动件设置在所述固定板的下表面上;
22.连杆,其第一端位于所述导风通道内,且穿过所述连接板后与所述刀架相连接,并且仅相对所述连接板沿着所述刷头之转动轴来回运动,该连杆的第二端位于所述外壳和固定板之间,且该第二端的端面上形成有与所述滑动件滑动配合的滑道,所述滑道内具有与所述滑动件数量一致且朝固定板方向延伸的凸起,在所述刀架处于邻近所述固定板的位置状态下,所述滑动件位于对应的相邻两个凸起之间,在所述刀架处于远离所述固定板的位置状态下,所述滑动件与对应的凸起相抵。
23.优选地,所述连杆的第二端套设有位于所述外壳和固定板之间的环形体,所述连杆和环形体之间设置有形成有所述的滑道,所述滑动件为转动设置在所述固定板上的滚轮,所述连杆的外周壁向外延伸形成有所述的凸起,所述凸起的另一端与所述环形体的内周壁相连。
24.为了对刷柱上缠绕的毛发完全进行切割,在所述刀架位于最远离所述固定板的位置状态下,所述刀片局部露出于所述刷柱的自由端。
25.为了使得连杆自动恢复至初始位置,还包括有作用在所述连杆上,且始终使所述连杆具有朝所述固定板方向运动趋势的弹性件。
26.刷头转动的驱动力可以为风力,也可以采用主动驱动的形式,但是从刷头转动的可靠性角度来讲,优选地,还包括有用来驱动所述刷头转动的驱动机构,所述驱动机构的动力输出端与所述刷头驱动连接。
27.具体地,所述连接板邻近中央的位置开设有供所述连杆的第二端向下穿过的开孔,所述开孔的周沿朝所述固定板方向延伸形成有延伸管,所述延伸管的另一端与所述驱动机构相连接,所述连杆沿着延伸管滑动且局部位于所述延伸管内。
28.优选地,所述导风通道有多个,且并排间隔布置,所述驱动机构包括有
29.电机,设置在所述外壳上,且位于所述导风通道之外,具有与所述刷头之转动轴并排布置的输出轴;
30.主动齿轮,安装在所述电机的输出轴上;
31.从动齿轮,与所述刷头对应设置,安装在对应的延伸管上,且位于所述滑道和外壳之间,其中一个所述的从动齿轮与所述主动齿轮相啮合,相邻两个所述刷头的从动齿轮相啮合。
32.本实用新型解决上述第三个技术问题所采用的技术方案为:所述刷头位于所述导风通道邻近中央的位置上,所述导风通道的侧壁上开设有用来供风切向进入的进风口,所述进风口与所述吸尘口相连通。
33.为了加速混合气流流动,所述外壳上设置有用来与清洁机的供液组件相连通的导液通道,所述导液通道具有出液口,沿着流体流动路径,所述出液口位于所述进风口的下游。
34.本实用新型解决上述第四个技术问题所采用的技术方案为:一种具有上述的刷头模块的清洁机,其特征在于:还包括有风机和用来分离水及灰尘混合物的分离模块,沿着气流流动路径,所述分离模块位于所述刷头模块和风机之间,所述分离模块的进入口与所述刷头模块的出风口流体连通,所述分离模块的排出口与所述风机的进口相连通。
35.优选地,所述清洁机为吸尘器或扫地机器人。
36.与现有技术相比,本实用新型的优点在于:该用于清洁机的刷头模块能对待清洁物体进行吸尘,刷头模块的刀架随着刷头一起转动,刀架在转动的过程中能相对刷头基本沿着水平方向在间隙内来回摆动以切割毛发,从而将刷头上的毛发进行自动切割,防止毛发在刷头上进行缠绕,清理下来的毛发能被吸入至导风通道内,一方面,实现了对刷头上的毛发的自动清理,无需人工手动进行清理,清理方便,另一方面,能及时将清理下来的毛发吸走,保持待清洁物体的干净。
附图说明
37.图1为本实施例的刷头模块的结构示意图;
38.图2为图1的另一角度的结构示意图;
39.图3为图1的剖视图;
40.图4为图1的另一角度的剖视图;
41.图5为2的另一角度的结构示意图;
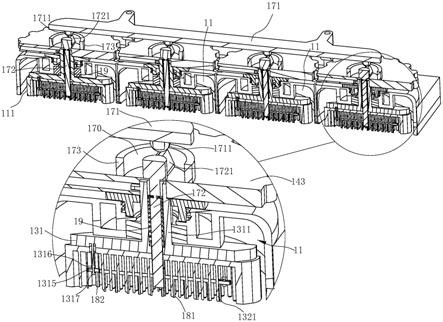
42.图6为图1的部分结构示意图;
43.图7为图6的剖视图;
44.图8为连杆的结构示意图;
45.图9为本实施例的吸尘器的结构示意图。
具体实施方式
46.以下结合附图实施例对本实用新型作进一步详细描述。
47.如图9所示,本实用新型实施例的清洁机为吸尘器,待清洁物体为地面。该吸尘器包括刷头模块01、风机4和用来分离水及灰尘混合物的分离模块,沿着气流流动路径,分离模块位于刷头模块01和风机4之间,分离模块的进入口与刷头模块01的出风口113 流体连通,分离模块的排出口与风机4的进口相连通。在风机4的作用下,会使刷头模块和分离模块内形成负压,从而将灰尘、水等垃圾经吸尘口111吸入刷头模块内,随后经分离模块进行分离后排出,分离模块可采用现有技术中任何结构,本实施例中将不再进行详细赘述。
48.如图9所示,用于清洁机的刷头模块01包括有刷头组件012和罩壳011,刷头组件012包括有外壳1、刷头13、刀架18、弹性件、联动机构及传动组件17。罩壳011 在对应吸尘口111的位置上开设有开口,刷头组件012局部位于罩壳011内,刷头组件 012之刷头13局部露出于开口之下。如图1至图8所示,外壳1的内部具有导风通道 11,导风通道11具有开口朝下的吸尘口111及出风口113,沿着流体流动路径,出风口 113位于吸尘口111的下游。如图3所示,刷头13位于导风通道11邻近中央的位置上,且该刷头13的外周沿与导风通道11的内周壁之间留有间隔135。导风通道11的侧壁上切向开设有用来供风切向进入的进风口112,进风口112与吸尘口111相连通。上述的导风通道11至少有两个,在本实施例中的导风通道11有四个且并排布置,各导风通道 11的进风口112位于外壳1的同一侧。
49.为了加快进入进风口内的流体流动速度,进风口112上连接有进风通道114,进风通道114位于导风通道11的前侧,且该进风通道114沿着气流流动路径逐渐收缩。如图1所示,进风通道114包括有前后延伸的第一连接壁118和自后向前逐渐向远离第一连接壁118方向延伸的第二连接壁119,位于中间的两个导风通道11之进风口112相邻设置,且两者共用同一个的第一连接壁118;位于两侧的两个导风通道11的进风口112 相远离设置,且两者的第二连接壁119的末端相连接而形成v形的导向壁,具体参见图 1所示。
50.如图1所示,外壳1上设置有用来与清洁机的供液组件相连通的导液通道12,相邻两个导风通道11之间具有一个导液通道12,导液通道12具有开口朝下的出液口121,沿着流体流动路径,出液口121位于相邻进风口112的下游。
51.上述的刷头13用来对待清洁物体进行清扫,如图2所示,刷头13通过转动轴能转动地设置在导风通道11内,刷头13的转动轴的轴线即为该刷头13的转动轴线,本实施例中,如图3所示,刷头13的转动轴沿着上下方向延伸,且该刷头13包括有基本水平布置的连接板131及设置在连接板131上的至少两排刷柱组,如图2和图3所示,相邻两排刷柱组之间留有间隙1300,每排刷柱组均包括有多根上下延伸且间隔布置的刷柱 1321,刷柱1321设置在连接板131的下表面上。如图3、图4及图6所示,刀架18设置在连接板131上,且位于连接板131之下并随连接板131一起转动,且该刀架18上设置有上下延伸的刀片181;本实施例中的刀架呈条状,刀片181有多个且沿刀架18 的长度方向间隔布置。
52.如图2所示,为了实现刀架18相对连接板131的上下运动,刀架18在传动组件 17的驱动下能够相对连接板131上下运动,前述的传动组件17的动力输入端与刷头13 传动连接,且该传动组件17的动力输出端与刀架18驱动连接。如图3、图4及图7所示,传动组件17包括有固定板171和连杆172,固定板171连接在外壳1的外壁上,且位于外壳1之上,固定板171的下表面上设置两个位于刷头13的转动轴的外围且沿周向间隔布置的滑动件,滑动件为转动设置在固定板171上的滚轮1711,滚轮1711有两个;连杆172竖向设置,连杆172的下端(第一端)位于导风通道11内且穿过连接板 131后与刀架18相连接,连杆172的上端(第二端)位于外壳1和固定板171之间,且该连杆172的上端面形成有与滚轮1711滑动配合的滑道170,滑道170内具有与滚轮 1711数量一致且向上延伸的凸起1721,具体地,如图4和图7所示,连杆172的上端套设有位于外壳1和固定板171之间的环形体173,连杆172和环形体173之间设置有形成有上述的滑道170,连杆172的外周壁向外延伸形成有上述的凸起1721,凸起1721 的另一端与环形体173的内周壁相连。在刀架18处于最低位置状态下,滚轮1711与对应的凸起1721相抵,参见图7所示,在刀架18处于最高位置状态下,滚轮1711位于对应的相邻两个凸起1721之间的凹陷区内。
53.如图3和图4所示,连接板131邻近中央的位置开设有供连杆172的上端向下穿过的开孔,开孔的周沿向上延伸形成有延伸管1311,延伸管1311的上端与驱动机构14 相连接,连杆172上下滑动且局部位于延伸管1311内。如图3所示,弹性件作用在连杆172上,且始终使连杆172具有向上运动的趋势,具体地,弹性件为套设在连杆172 的外围且位于套管1311内的弹簧19,开孔的内周壁向内延伸形成有台阶,弹簧19的下端能与该台阶相抵,弹簧19的上端能与连杆172的局部相抵,从而使该弹簧19处于蓄能状态。
54.如图5所示,刷头13在驱动机构14的驱动在绕自身转动轴线转动,驱动机构14 的动力输出端与刷头13驱动连接。前述的驱动机构14包括有电机141、主动齿轮142 及从动齿轮143,每个刷头13对应有一个从动齿轮143,其中,电机141设置在外壳1 上,且位于导风通道11之外,电机141具有竖向延伸的输出轴;主动齿轮142安装在电机141的输出轴上;从动齿轮143安装在对应刷头13的延伸管1311上,且位于环形体173和外壳1之间,其中一个从动齿轮143与主动齿轮142相啮合,相邻两个刷头13 的从动齿轮143相啮合,从而在电机141的驱动下,并在主动齿轮142及从动齿轮143 的传动啮合下实现各个刷头13的转动。刷头13在转动的过程中,连杆172随着刷头13 一起转动,并在滚轮1711、凸部1721及滑道170的作用下带刀架18上下运动。
55.刀架18在联动机构的作用下能相对连接板沿着水平方向来回运动,联动机构同时与连接板131和刀架18相连接,从而使刀架18基本沿着水平方向在间隙1300内来回摆动以切割毛发。如图4和图7所示,联动机构包括有设置在连接板131上且向下延伸的延伸杆1315,延伸杆1315有两根,且沿着刀架18的长度方向间隔布置,刀架18上开设有沿刀架18的长度方向延伸的导向槽182,每个延伸杆1315对应有一个导向槽182,延伸杆1315的外周壁侧向凸设有上下间隔布置的第一凸部1316和第二凸部1317,第一凸部1316位于第二凸部1317之上,延伸杆1315位于第一凸部1316和第二凸部1317 之间的部分始终位于导向槽182内,且能沿着该导向槽182的长度方向能横向来回滑动地限位在该导向槽182内。如此,在刷头13转动的过程中,由于延伸杆1315会在导向槽182内横向来回运动,从而完成对清扫工作时嵌入至间隙1300内的毛发进行切割。
56.本实用新型所称的“流体连通”是指两个部件或部位(以下统一分别称为第一部位、第二部位)之间的空间位置关系,即流体(气体、液体或两者的混合)能从第一部位沿着流动路径流动或/和被运送到第二部位,可以是所述的第一部位、第二部位之间直接相连通,也可以是第一部位、第二部位之间通过至少一个第三者间接连通,该第三者可以是诸如管道、通道、导管、导流件、孔、槽等流体通道、也可以是允许流体流过的腔室或以上组合。上述说明书和权利要求中的竖向包括但不限于竖直。
57.在本实用新型的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本实用新型的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本实用新型所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。