1.本实用新型涉及工程机械技术领域,特别涉及双体座式抹光机的抹刀机构。
背景技术:
2.抹光机是一种混凝土表面粗、精抹光机具,经过抹光机施工的表面较人工施工的表面更光滑、更平整,能极大提高混凝土表面的密实性及耐磨性,并在功效上较人工作业提高工作效率数倍以上。抹光机可广泛用于高标准厂房、仓库、停车场、广场、机场以及框架式楼房的混凝土表面的提浆、抹平、抹光,是混凝土施工中的重要工具之一。
3.现有的抹光机,特别是座式抹光机,由于需要布置多个抹刀机构、传动机构和控制机构,并且还要布置动力单元,使得抹光机整体结构较高,在长期震动工作下,结构的稳固的性和可操控性较差。
技术实现要素:
4.本实用新型的目的在于提供一种双体座式抹光机的抹刀机构,并实现使抹光机结构更加紧凑可靠,调节使用更加便利。
5.为了实现上述目的,本实用新型的技术方案如下:
6.一种双体座式抹光机的抹刀机构,包括抹刀盘和抹刀轴,所述抹刀盘成水平十字结构,其外沿有四个抹刀臂,抹刀臂的外端转动连接有抹刀杆,所述抹刀杆的底面连接有抹刀片,所述抹刀臂的侧壁连接有扭臂,所述扭臂的末端设有扭臂螺栓,所述在抹刀盘上方的抹刀轴上通过轴承套放有压盘,所述压盘的下沿能够与扭臂螺栓接触,并驱动抹刀杆发生转动,所述压盘的上方设有压臂,所述压臂的后端连接有压臂调节部件,所述摇臂调节部件包括直管、滑块、拉索和丝杆,所述滑块成圆柱形,并布置在直管的内部,滑块的内部设有内螺纹,该内螺纹能够与丝杆配合,所述滑块的底部与拉索连接,所述丝杆的顶部设有摇臂。
7.进一步的,所述抹刀杆的截面成正六边形结构。
8.进一步的,所述抹刀杆的外端设有抹刀环,所述抹刀杆与抹刀环成转动连接状态,所述抹刀环中心线与抹刀轴的中心线重合,并将四个抹刀杆限制在其内部。
9.进一步的,所述扭臂螺栓的顶部为光滑圆弧结构。
10.进一步的,所述直管侧壁设有长直孔,所述滑块上设有螺栓孔,所述螺栓孔上配合后滑块螺栓,所述滑块螺栓的外端延伸出长直孔的外沿。
11.进一步的,所述滑块上直列布置有五个螺栓孔。
12.采用本方案后,对比现有技术,具有以下好处:
13.本方案一种双体座式抹光机的抹刀机构,抹刀片以抹刀盘及抹刀轴为中心进行转动,并且针对差异的混泥土情况,能够通过压臂调节机构来调节抹刀片的转动角度,从而能够实现多种情况下或设计要求下的抹光调节功能,在压臂调节机构处,通过丝杆的自锁能力,能够很好的维持抹刀片的角度支撑,故调节和使用极为便利,抹刀片在转动过程中,通过抹刀环,能够保持较好的动平衡,当抹刀片接触较大的硬块时,可以减少对当前抹刀片及
抹刀盘的冲击力,使整个抹光操作更加平顺,本方案结构紧凑稳固,操作便利,维护便利,具有较好的推广意义。
附图说明
14.图1为优选实施例整体结构示意图。
15.图2为抹光机内部结构示意图。
16.图3为抹刀机构的结构示意图。
17.图4为抹刀机构的内部结构示意图。
18.图5为压臂调节部件的结构示意图。
19.图6为传动机构结构示意图。
20.图7为传动机构结构的另一侧示意图。
21.图8为调节机构结构示意图。
具体实施方式
22.参考图1图2,一种双体座式抹光机,包括:构架1、抹刀机构2、传动机构3、调节机构4和动力机构5,其中构架1以框架式结构布置在抹刀机构2的外侧,并将抹刀机构2的侧边及顶部以包覆的保护结构,并使抹刀机构2能够与地面处的混凝土面贴合,在构架1上布置有动力机构3和传动机构5,用于驱动抹刀机构2转动,并实现对混凝土的抹光操作,调节机构3用于控制抹刀机构2的倾仰角度,从而实现抹光机的行径控制。
23.在构架1的顶部中心处布置有座位11,用于操作者乘坐,在座位前方分别布置有踏板12,用于控制动力机构5的工作状况,动力机构5可以为内燃机动力或者电动机动力,操作者通过踏板12可以实现动力机构5的启停或运转速度等调节或控制。
24.参考图3图4图5,抹刀机构2分为左边部和右边部,左边部和右边部主体成对称结构,本文以左边部为例进行说明,其抹刀盘21和抹刀轴22,抹刀盘21成水平十字结构,其外沿有四个抹刀臂211,抹刀臂211的外端均转动连接有抹刀杆212,即末端杆212的前端套放在抹刀臂211处,抹刀杆212与与其套放的抹刀臂211成中心线对齐的方式布置,并实现末端杆212能够在抹刀臂211处能够实现以中心线为中心的方式转动,在抹刀杆212靠近末端臂211处的侧壁上连接有扭臂213,扭臂213向后延伸至末端臂211 一侧,在扭臂213的末端设有扭臂螺栓214,故通过对扭臂螺栓214下压施力,能够实现对抹刀杆212的转动控制;
25.抹刀杆212的底面连接有抹刀片215,抹刀片215成长方形,其表面光滑,在实际抹光操作时,主体是通过四个抹刀片215对混凝土进行表面转动挤压及抹面运动,来说实现平整及抹光混凝土的操作。
26.在抹刀盘21上方的抹刀轴22上通过轴承套放有压盘221,压盘221的下沿能够与扭臂螺栓214接触,压盘221上方设有压臂222,压臂222成拨叉形,其前端两臂与压盘221的上缘贴合,中部设有转轴,该转轴与构架连接,并实现压臂222可以以该转轴处实现转动,压臂222的后端连接有压臂调节部件23,摇臂调节部件23包括直管231、滑块232、拉索233和丝杆234,直管231内部具有光滑平整的内壁,滑块 232成圆柱形,其外壁能够与直管231的内壁贴合,并实现滑块232在直管内部位移,滑块232的内部设有内螺纹,该内螺纹能够与丝杆234配合,滑块232的底部与拉索233连接,拉索233的另一端与压臂222 的后端连接,丝杆
234的顶部设有摇臂235,摇臂235同时设置在直管231的顶部。
27.在直管231侧壁设有长直孔236,滑块232上设有直列布置有五个螺栓孔237,螺栓孔237上配合设置有滑块螺栓,滑块螺栓的外端延伸出长直孔236的外沿,通过滑块螺栓,可以限制滑块232相对于直管 231的转动,从而通过操作者转动摇臂235,通过丝杆234能够驱动滑块232向上位移,并且通过长直孔 236的实现对滑块螺栓及滑块232的位移距离的限制,防止操作过度。
28.在一些实施例中,抹刀杆212的外端设有抹刀环215,抹刀杆212与抹刀环216成转动连接状态,并且抹刀环216中心线与抹刀轴22的中心线重合,从而能够将四个抹刀杆212限制在其内部,实现更好的结果强度和转动平衡性。
29.在一些实施例中,扭臂螺栓214的顶部为光滑圆弧结构,故当扭臂螺栓214的顶部与压盘221的底部接触时,可以减少摩擦阻力,并使所有的扭臂螺栓214具有相同的下压行程,同时当压盘221的底部接触一定的混凝土时,对扭臂螺栓214的转动影响也较小。
30.在一些实施例中,抹刀杆212主体部分的截面成正六边形结构,从而通过螺栓对抹刀片215进行安装时,可以提高安装接触面积,从而提高整体的安装强度,并实现抹刀片215进行工作时的稳定性。
31.参考图6图7,传动机构3包括输出轮31,所述输出轮31的前端连接动力机构5,构架1上通过轴承连接传动连轴32,传动连轴32上设有传动连轴轮321,输出轮31与传动连轴轮321之间通过v形皮带 311连接,传动连轴32的两端均设有第一万向节33,第一万向节33的后端连接有传动杆34,传动杆34 的后端连接有第二万向节35,第二万向节35的末端均连接有变速器36,变速器36优选为蜗轮蜗杆减速器,并能够将横向转动转为垂直转动,变速器36的输入轴(蜗杆)与第二万向节35连接,变速器36的输出轴(蜗轮轴)即为抹刀轴22,从而实现变速器36与抹刀机构2的连接,左右两侧变速器36成对称布置状态,并使两个抹刀轴22成等速向相转动状态。
32.在一些实施例中,传动连轴32的外端与左右两个抹刀轴22成等距状态,即两个传动杆34的长度为相当状态,从而可以使动力机构5输出的动力均匀的输出至两个抹刀机构2处,减少传动损耗,并使两个抹刀机构2能够等速高效的转动,并减少传动的反向扭矩及传动震动。
33.在一些实施例中,输出轮31外端设有飞轮312,可以起到平衡转动的作用,减少传动的顿挫感。
34.在一些实施例中,为了更好的提高传动平衡性,传动连轴32连接至构架1上的轴承的数量为两个,其成左右布置状态,从而可以传动连轴32转动及传动更加稳定。
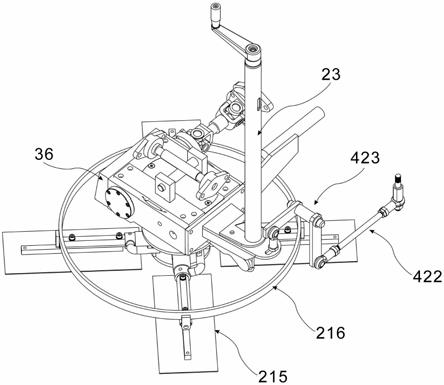
35.参考图8,调节机构4,包括第一控制杆401和第二控制杆402,第一控制杆401和第二控制杆402 成直立布置状态,两者布置在两个踏板12的中间位置,便于操作者使用操作,左部的抹刀机构2顶部的变速器36上布置有x轴转轴41和y轴转轴42,右部的抹刀机构2顶部变速器36上布置有x轴转轴41, x轴转轴41与y轴转轴42的两端通过轴承与构架1连接,其中x轴转轴41实现抹刀机构2以x轴转轴中心线做左右方向的侧倾,y轴转轴42实现抹刀机构2以y轴转轴中心线做前后方向的侧倾,从而用于控制抹光机的多种运动状态调节;
36.所述第一控制杆401和第二控制杆402的前端均连接有十字转动架,从而可以实现操作者对第一控制杆401或第二控制杆402的前后或左右方向的偏转拉动,并迫使第一控制
杆401或第二控制杆402的十字转动架的另一端成反方向的运动;
37.第一控制杆401和第二控制杆402的十字传动架处分别连接有第一连杆403和第二连杆404,第一连杆403后端连接第一横杆405,第二连杆404后端连接第二横杆406,第一横杆405和第二横杆406的中部,通过转轴与构架1固定,并形成一个类似于以支点在中间处的杠杆的结构;
38.在左部的变速器36上固定连接有x轴摇杆411和y轴摇杆412,在右部的变速器36上固定连接有x 轴摇动杆413,第一横杆405后端通过连接杆与x轴摇杆411连接,第二横杆406后端通过连接杆与x 轴摇动杆413连接;
39.当操作者向前推动第一控制杆401时,即向上提起第一连杆403,并拉动第一横杆405的前端上翘,故第一横杆405的后端则下降,从而拉动x轴摇杆411向下倾斜,故左部的抹刀机构2成向左倾斜状态,反之,操作者可以实现对左部的抹刀机构2成向右倾斜状态,同样的道理,操作者可以通过控制第二控制杆402实现对右部抹刀机构2的左右倾斜的控制。
40.在第一控制杆401和第二控制杆402的最下端,布置有第三连杆421,第三连杆421横向布置,并将第一控制杆401和第二控制杆402成横向连接状态,在第一控制杆401的最前端,横向连接有第四连杆422,第四连杆422的末端通过一个直角杆423与y轴摇杆412连接,支架杆423在其直角弯处通过转轴与构架 1连接;
41.当操作者向右推动第一控制401或第二控制杆402时,通过第三连杆421可以使两者处于同步状态,再在第四连杆422和直角杆423的作用下,能够实现对左部末端机构2成前侧上翘后侧下降的状态,反正向左推动,则实现对左部末端机构2成前侧下降后侧上翘的操作。
42.在一些实施例中,第一控制杆401与第二控制杆402的上端设有控制套杆407,控制套杆407与第一控制杆401及第二控制杆402通过可调节螺栓连接,可以便于对第一控制杆401或第二控制杆402的安装及拆卸,并便于对不同的操作者实现第一控制杆401及第二控制杆402的长度调节功能,使操作更加人性化。
43.为了实现连接件中的扭转功能,在调节机构4中连接关节均采用为球头杆端关节轴承结构,从而可以极少多向运动操作中的彼此的干涉,是操作更加顺畅。
44.在实际操作中,操作者乘坐在座位11处,并处于本抹光机的中心位置,和较高位置点,故具有较好的操作视野,其双脚放置在踏板12处,用于控制动力机构5的工作状况,并启动动力机构5,在传动机构 4的作用下,实现对左右两侧抹刀机构2的实现等速向相转动状态,当待处理的混泥土成不平整状态时,操作者通过转动一侧或两侧的摇臂235,并使抹刀机构2中的所有抹刀片215均成倾斜角度状态,故在倾斜的抹刀片215的转动作用下,向下施压混泥土,并使混泥土成向四周扩散的状态,同时也使较厚的混泥土向下运动,使泥水含量较高的混泥土处于表面状态,后操作者反向转动压臂235,并使抹刀片215整体成平面状态,当抹刀机构2转动时,可以实现混泥土表面的平整和抹光操作;
45.为了实现更大范围的抹光操作,操作者通过第一控制杆401和第二控制杆402实现对对抹光机的运动行径控制,具体的说,当需要抹光机整体向左移动时,操作者通过向左侧倾第一控制杆401和第二控制杆 402,是左部的抹刀机构2成向右偏转状态,左部抹刀机构2的抹刀片在最右侧施力,并驱动整个抹光机向左移动,反之则可以实现向右移动操作;
46.当操作者通过对第一控制杆401和第二控制杆402向前推动操作时,在x轴摇杆411
及x轴摇动杆413 的作用下,实现两侧的抹刀机构2的处于后侧的抹刀片215接触混泥土,从而驱动整个抹光机成向前运动状态,反之则可以实现向后移动操作;
47.根据相同的原理,当操作者对第一控制杆401向前推动,而第二控制杆402向后拉动操作,则可以实现抹光机向右转弯状态,反之则实现向左转弯状态;
48.操作者通过上述操作及控制,可以实现大面积的混泥土抹面操作,大大提高了工作效率和混泥土抹面质量。
49.综上所述,本方案一种双体座式抹光机,在操作者通过座位布置在抹光机的顶部,并处于本抹光机的中心位置,和较高位置点,故具有较好的操作视野,整体驾乘输送,并整机了抹光机的自身承载,提高了抹光操作的效能,通过构架实现抹光机构外围一圈的保护,能够防止各种误操作,故本方案结构稳固,操作便利,抹光效能更佳;
50.在抹刀机构2中,抹刀片215以抹刀盘21及抹刀轴22为中心进行转动,并且针对差异的混泥土情况,能够通过压臂调节机构23来调节抹刀片215的转动角度,从而能够实现多种情况下或设计要求下的抹光调节功能,在压臂调节机构23处,通过丝杆234的自锁能力,能够很好的维持抹刀片215的角度支撑,故调节和使用极为便利,抹刀片215在转动过程中,通过抹刀环216,能够保持较好的动平衡,当抹刀片215接触较大的硬块时,可以减少对当前抹刀片215及抹刀盘21的冲击力,使整个抹光操作更加平顺;
51.在传动机构3中,总体采用对称平衡的结构,采用左右等长传动连轴32和两侧对称的传动杆34结构,实现一个主动力来左右平衡传动输出,能够保证两侧的抹刀机构2的转动高度一致,并且分配到相同量的扭矩,当抹光机实施直线运动时,也不会出现偏转的情况,从而可以抹光效果更佳,在输出轮31和传动连轴轮之间采用具有柔性的v形皮带,能够实现相对弹性的连接,相比较传动的刚性连接,可以减少抹光操作中的瞬时冲击对整机及动力机构5的影响;
52.在调节机构4中,整体将第一控制杆401和第二控制杆402布置在两个踏板12的中间位置,更加符合操作要求,并减少与压臂调节机构23的操作干涉,操作更加灵活,同时为了使操作更加符合运动控制要求和通常使用的习惯性,对第一控制杆401和第二控制杆402的操作,通过多个连杆或横杆等部件,实现前后左右的操作与抹光机的运动控制对应,大大提高了抹光机操作的适应性,并减少误操作的可能性,故具有直接高新的调节操作功能,本方案结构稳固,维护便利,具有较好的推广意义。