1.本发明属于先进生产制造及自动化技术领域,特别涉及一种多工位压铸机的自动脱模装置。本发明还涉及一种多工位压铸机的自动脱模装置的工作方法。
背景技术:
2.压铸是一种金属铸造工艺,其特点是利用模具腔对融化的金属施加高压。模具通常是用强度更高的合金加工而成的,这个过程有些类似压铸成型。大多数压铸铸件都是不含铁的,例如锌、铜、铝、镁、铅、锡以及铅锡合金以及它们的合金。
3.压铸机就是在压力作用下把熔融金属液压射到模具中冷却成型,开模后可以得到固体金属铸件,最初用于压铸铅字;随着科学技术和工业生产的进步,尤其是随着汽车、摩托车以及家用电器等工业的发展,压铸技术已获得极其迅速的发展。
4.压铸机的出现给生产带来了极大便利,使人们摆脱了沉重的劳动,节省了大量的人力和物力,但是现有的压铸机的脱膜结构设计非常不合理,工人的劳作力变强,而且效率不高,大大增加了生产成本,而且浇料装置机动化不够,因此,如何设计出成本低、生产效率高的自动脱模机构,成为本领域技术人员亟待解决的技术问题。
技术实现要素:
5.发明目的:为了克服以上不足,本发明的目的是提供一种多工位压铸机的自动脱模装置,解决了现有技术的压铸机由工人取出模具,再深入模具内取出铸件,该种方式存在较大的安全隐患,且需要较多的人力资源,人力成本较高,工人的工作量较大,加工速度较慢,工作效率低的问题。
6.技术方案:一种多工位压铸机的自动脱模装置,包括压铸机单元一、压铸机单元二、自动下料输送单元、龙门架体、工件下料机械人、脱模剂喷涂机器人一、脱模剂喷涂机器人二、下料机器人水平驱动单元、脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二,所述压铸机单元一和压铸机单元二分别设置在自动下料输送单元沿输送方向的两侧,所述龙门架体罩设在自动下料输送单元位置处,并且龙门架体的长度方向沿自动下料输送单元的输送方向设置,所述下料机器人水平驱动单元、脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二均设置在龙门架体上,所述工件下料机械人和下料机器人水平驱动单元设置在龙门架体靠近压铸机单元一的一侧,所述脱模剂喷涂机器人水平驱动单元二设置在龙门架体靠近压铸机单元二的一侧,所述脱模剂喷涂机器人一和脱模剂喷涂机器人水平驱动单元一连接,所述脱模剂喷涂机器人二和脱模剂喷涂机器人水平驱动单元二连接。本发明的多工位压铸机的自动脱模装置,通过设置的可水平移动的工件下料机械人、脱模剂喷涂机器人一、脱模剂喷涂机器人二,能够在控制系统的灵活调度下,使得工件下料机械人连续不断的进行工件的下料脱模,同时使得脱模剂喷涂机器人一和脱模剂喷涂机器人二能够连续进行模具上脱模剂的喷涂,避免了传统的脱模剂喷涂和下料需要长时间等待的问题,充分利用了生产资源,设置的工件下料机械人,能够自动进
行工件的脱模下料,避免了工作人员抓取压铸件,进而防止工作人员受伤,进而有效的提高了工作效率。
7.进一步的,上述的多工位压铸机的自动脱模装置,所述压铸机单元一由一组压铸机一构成,所述一组压铸机一处于同一直线上,所述一组压铸机一所处的直线与自动下料输送单元平行设置,所述压铸机单元二由一组压铸机二构成,所述一组压铸机二处于同一直线上,所述一组压铸机二所处的直线与自动下料输送单元平行设置,所述自动下料输送单元由一组自动传送带组成,所述一组自动传送带处于同一直线上,并且一组自动传送带之间的首尾相接,所述一组自动传送带中末端的自动传送带上连接有下料板。
8.进一步的,上述的多工位压铸机的自动脱模装置,所述下料机器人水平驱动单元包括下料水平驱动电机、下料水平驱动丝杆、两个对称设置的丝杆支撑座、至少一个下料驱动滑块、下料机器人连接板、两条导向柱和导向滑板,所述两个对称设置的丝杆支撑座设置在龙门架体横梁的下端面上,所述下料水平驱动丝杆的两端设置在两个对称设置的丝杆支撑座上,所述下料水平驱动电机和下料水平驱动丝杆连接,并且下料水平驱动电机可驱动下料水平驱动丝杆旋转,所述下料驱动滑块套设在下料水平驱动丝杆上,所述下料机器人连接板和下料驱动滑块固定连接,所述工件下料机械人和下料机器人连接板连接,所述两条导向柱和下料水平驱动丝杆平行设置,并且两条导向柱分别位于下料水平驱动丝杆的两侧,所述下料驱动滑块其中之一和导向滑板固定连接,所述导向滑板的两端分别和两条导向柱滑动连接,所述下料机器人连接板和导向滑板固定连接。
9.进一步的,上述的多工位压铸机的自动脱模装置,所述脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二的结构相同,并且脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二对称设置,所述脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二均包括喷涂驱动电机、喷涂支撑滑板、喷涂驱动齿条、喷涂驱动齿轮、两条平行设置的直线导轨和喷涂机器人连接板,所述喷涂驱动电机设置在喷涂支撑滑板上,所述喷涂支撑滑板上连接有喷涂驱动滑块,所述喷涂驱动滑块和直线导轨滑动连接,所述喷涂驱动电机的转轴和喷涂驱动齿轮连接,所述喷涂驱动齿轮和喷涂驱动齿条啮合,所述喷涂驱动齿条和直线导轨平行设置,所述喷涂驱动齿条和直线导轨均设置在龙门架体的上端面上,所述喷涂机器人连接板的一端和喷涂支撑滑板固定连接,并且喷涂机器人连接板的另一端延伸出龙门架体,所述脱模剂喷涂机器人一和脱模剂喷涂机器人二均与喷涂机器人连接板连接。
10.进一步的,上述的多工位压铸机的自动脱模装置,所述工件下料机械人包括六轴机械臂和下料夹爪,所述六轴机械臂和下料机器人连接板固定连接,所述下料夹爪和六轴机械臂连接;所述下料夹爪包括夹爪连接块、夹爪安装架体、支撑盘、夹爪驱动组件和一组工件夹爪本体,所述支撑盘和夹爪连接块远离六轴机械臂的端部连接,所述夹爪安装架体上设有一组工件夹爪本体,并且一组工件夹爪本体以支撑盘的中心为圆心按照环形阵列的方式设置,所述夹爪驱动组件设置在夹爪连接块上,并且夹爪驱动组件和夹爪安装架体连接,所述夹爪安装架体设置在支撑盘上,并且夹爪安装架体和支撑盘滑动连接,所述夹爪驱动组件可驱动夹爪安装架体外扩或者收缩。
11.进一步的,上述的多工位压铸机的自动脱模装置,所述夹爪安装架体由一组夹爪支撑架体,所述一组夹爪支撑架体以支撑盘的中心为圆心按照环形阵列的方式设置,所述
一组夹爪支撑架体和一组工件夹爪本体一一对应设置,所述工件夹爪本体的一端和夹爪支撑架体固定连接。
12.进一步的,上述的多工位压铸机的自动脱模装置,所述夹爪支撑架体包括夹爪安装板、支撑滑板、夹爪导向柱和限位块,所述夹爪安装板固定设置在支撑滑板远离支撑盘中心的端部上,所述夹爪导向柱和支撑滑板靠近支撑盘中心端部的上端面固定连接,所述限位块和夹爪导向柱远离支撑滑板的端部固定连接,所述支撑滑板和支撑盘滑动连接,所述夹爪导向柱和夹爪驱动组件连接,所述支撑盘上沿径向设有一组滑槽二,所述一组滑槽二和一组夹爪支撑架体一一对应设置,所述支撑滑板设置在滑槽二内,并且支撑滑板可在滑槽二内滑动。
13.进一步的,上述的多工位压铸机的自动脱模装置,所述夹爪驱动组件包括夹爪驱动电机、夹爪主动轮和夹爪从动轮,所述夹爪驱动电机和夹爪从动轮均设置在夹爪连接块上,所述夹爪驱动电机的转轴和夹爪主动轮连接,所述夹爪主动轮和夹爪从动轮啮合,所述夹爪从动轮和支撑盘的中心处于同一轴线上,并且夹爪主动轮和夹爪从动轮均处于支撑盘的水平位置以上,所述夹爪导向柱和夹爪从动轮连接。
14.进一步的,上述的多工位压铸机的自动脱模装置,所述夹爪从动轮上设有一组导向驱动槽,并且一组导向驱动槽以夹爪从动轮的中心为圆心按照环形阵列的方式设置,所述一组导向驱动槽和一组夹爪支撑架体一一对应设置,所述夹爪导向柱设置在导向驱动槽内,并且夹爪导向柱可沿导向驱动槽移动,所述导向驱动槽为弧形槽,并且导向驱动槽沿夹爪从动轮的径向弯曲设置,所述限位块和支撑滑板分别位于夹爪从动轮的上下两侧,所述限位块的截面为圆形,并且限位块的直径和支撑滑板的宽度均大于导向驱动槽的宽度。
15.本发明还提供一种多工位压铸机的自动脱模装置的工作方法,包括以下步骤:s1、压铸机单元一和压铸机单元二内的一组压铸机一和一组压铸机二开机,进行工件的压铸,一组压铸机一和一组压铸机二可进行相同工件的生产也可以进行不同工件的生产,进行相同工件的压铸时,可使得一组压铸机一和一组压铸机二之间错峰开机,这样使得一组压铸机一和一组压铸机二处于不同的工作状态;s2、脱模剂喷涂机器人水平驱动单元一启动,驱动脱模剂喷涂机器人一移动至压铸机单元一的一端,然后在压铸机单元一内的一组压铸机一上的模具上逐一喷涂脱模剂;s3、步骤s2进行的同时,脱模剂喷涂机器人水平驱动单元二启动,驱动脱模剂喷涂机器人二移动至压铸机单元二的一端,然后在压铸机单元二内的一组压铸机二上的模具上逐一喷涂脱模剂;s4、一组压铸机一和一组压铸机二分别启动,进行工件的压铸;s5、当一组压铸机一和一组压铸机二其中之一压铸完毕,开模后,控制系统通知下料机器人水平驱动单元此压铸机一或压铸机二压铸完毕,需要取出工件;s6、下料机器人水平驱动单元驱动工件下料机械人移动至压铸完毕的压铸机一或压铸机二位置处,六轴机械臂驱动下料夹爪伸入至模具之间的工件位置处,并且一组工件夹爪本体插入工件中心内孔中;s7、夹爪驱动电机启动,带动夹爪主动轮顺时针旋转,夹爪主动轮带动夹爪从动轮旋转,由于夹爪从动轮旋转,使得夹爪从动轮上的一组导向驱动槽旋转,导向驱动槽的的旋转对夹爪导向柱支架径向方向的压力,从而推动夹爪导向柱沿着导向驱动槽移动,夹爪导
向柱带动工件夹爪本体移动,此时一组工件夹爪本体同步移动,以夹爪从动轮的中心为圆心处于同一圆周向外展开,直至一组工件夹爪本体与工件中心内孔的内壁相接触,此时一组工件夹爪本体将工件撑住;s8、六轴机械臂驱动下料夹爪移动,从而使得工件从模具上脱模下来;s9、六轴机械臂驱动下料夹爪移动,使得下料夹爪上夹持的工件位于自动传送带的正上方;s10、夹爪驱动电机启动,带动夹爪主动轮逆时针旋转,远离同步骤s7,此时由于夹爪从动轮是逆时针旋转,因此一组工件夹爪本体以夹爪从动轮的中心为圆心处于同一圆周向内收缩,一组工件夹爪本体与工件中心内孔的内壁分离,工件落在自动传送带上,自动传送带进行工件的输送;s11、不断重复上述步骤s2~ s10,能够进行多工位压铸机的连续自动脱模;s12、当一组压铸机一和一组压铸机二中多个压铸完成开模时,即工件下料机械人正在下料时,控制系统进行判断,通知一组压铸机一和一组压铸机二等待,控制系统检测工件下料机械人距离压铸完成的压铸机一或压铸机二距离远近,判断下一个下料的压铸机一或压铸机二。
16.本发明所述的多工位压铸机的自动脱模装置的工作方法,工作原理简单易行,工作过程自动化程度高,所需要的人力少,提高了生产效率,适合工业大规模应用。
17.上述技术方案可以看出,本发明具有如下有益效果:本发明所述的多工位压铸机的自动脱模装置,通过设置的独立的下料机器人水平驱动单元、脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二,使得工件下料机械人、脱模剂喷涂机器人一、脱模剂喷涂机器人二能够独立工作进行下料、脱模,使多工位压铸机实现铸件自动脱模,减少安全隐患,节约人力资源,提高工作效率;另外根据工件的特殊要求,将传统的从外侧夹持工件进行脱模的方式,更改为支撑住工件的内部中心孔进行脱模,提高模具内工件的成型质量,避免损伤工件或者夹持方式下容易造成的工件变形,此种内部外撑的脱模结构便于脱模。本发明所述的多工位压铸机的自动脱模装置的工作方法,工作原理简单易行,工作过程自动化程度高,所需要的人力少,提高了生产效率,适合工业大规模应用。
附图说明
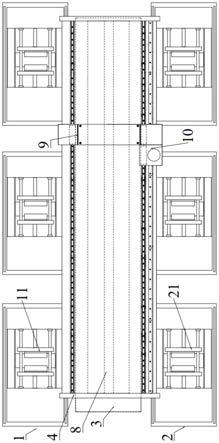
18.图1为本发明所述的多工位压铸机的自动脱模装置的俯视图;图2为本发明所述的压铸机单元一、压铸机单元二和自动下料输送单元的布局图;图3为本发明所述的多工位压铸机的自动脱模装置的主视图;图4为本发明所述的压铸机单元一、压铸机单元二和自动下料输送单元的主视图;图5为本发明所述的下料机器人水平驱动单元的结构示意图;图6为本发明所述的下料机器人水平驱动单元的局部结构示意图;图7为本发明所述的龙门架体、工件下料机械人、脱模剂喷涂机器人一和脱模剂喷涂机器人二的结构示意图;图8为本发明所述的脱模剂喷涂机器人水平驱动单元一和脱模剂喷涂机器人水平驱动单元二的结构示意图;图9为本发明所述的工件下料机械人的结构示意图;
图10为本发明所述的下料夹爪的结构示意图;图11为本发明所述的下料夹爪的主视图一;图12为本发明所述的下料夹爪的主视图二。
具体实施方式
19.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
20.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
22.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
23.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
实施例
24.如图1-4所示的多工位压铸机的自动脱模装置,包括压铸机单元一1、压铸机单元二2、自动下料输送单元3、龙门架体4、工件下料机械人5、脱模剂喷涂机器人一6、脱模剂喷涂机器人二7、下料机器人水平驱动单元8、脱模剂喷涂机器人水平驱动单元一9和脱模剂喷涂机器人水平驱动单元二10,所述压铸机单元一1和压铸机单元二2分别设置在自动下料输送单元3沿输送方向的两侧,所述龙门架体4罩设在自动下料输送单元3位置处,并且龙门架体4的长度方向沿自动下料输送单元3的输送方向设置,所述下料机器人水平驱动单元8、脱模剂喷涂机器人水平驱动单元一9和脱模剂喷涂机器人水平驱动单元二10均设置在龙门架体4上,所述工件下料机械人5和下料机器人水平驱动单元8连接,所述脱模剂喷涂机器人水平驱动单元一9设置在龙门架体4靠近压铸机单元一1的一侧,所述脱模剂喷涂机器人水平
驱动单元二10设置在龙门架体4靠近压铸机单元二2的一侧,所述脱模剂喷涂机器人一6和脱模剂喷涂机器人水平驱动单元一9连接,所述脱模剂喷涂机器人二7和脱模剂喷涂机器人水平驱动单元二10连接。
25.其中,压铸机单元一1由一组压铸机一11构成,所述一组压铸机一11处于同一直线上,所述一组压铸机一11所处的直线与自动下料输送单元3平行设置,所述压铸机单元二2由一组压铸机二21构成,所述一组压铸机二21处于同一直线上,所述一组压铸机二21所处的直线与自动下料输送单元3平行设置,所述自动下料输送单元3由一组自动传送带31组成,所述一组自动传送带31处于同一直线上,并且一组自动传送带31之间的首尾相接,所述一组自动传送带31中末端的自动传送带31上连接有下料板32。
26.如图5、6所示的下料机器人水平驱动单元8包括下料水平驱动电机81、下料水平驱动丝杆82、两个对称设置的丝杆支撑座83、至少一个下料驱动滑块84、下料机器人连接板85、两条导向柱86和导向滑板87,所述两个对称设置的丝杆支撑座83设置在龙门架体4横梁的下端面上,所述下料水平驱动丝杆82的两端设置在两个对称设置的丝杆支撑座83上,所述下料水平驱动电机81和下料水平驱动丝杆82连接,并且下料水平驱动电机81可驱动下料水平驱动丝杆82旋转,所述下料驱动滑块84套设在下料水平驱动丝杆82上,所述下料机器人连接板85和下料驱动滑块84固定连接,所述工件下料机械人5和下料机器人连接板85连接,所述两条导向柱86和下料水平驱动丝杆82平行设置,并且两条导向柱86分别位于下料水平驱动丝杆82的两侧,所述下料驱动滑块84其中之一和导向滑板87固定连接,所述导向滑板87的两端分别和两条导向柱86滑动连接,所述下料机器人连接板85和导向滑板87固定连接。
27.如图7、8所示的脱模剂喷涂机器人水平驱动单元一9和脱模剂喷涂机器人水平驱动单元二10的结构相同,并且脱模剂喷涂机器人水平驱动单元一9和脱模剂喷涂机器人水平驱动单元二10对称设置,所述脱模剂喷涂机器人水平驱动单元一9和脱模剂喷涂机器人水平驱动单元二10均包括喷涂驱动电机91、喷涂支撑滑板92、喷涂驱动齿条93、喷涂驱动齿轮94、两条平行设置的直线导轨95和喷涂机器人连接板96,所述喷涂驱动电机91设置在喷涂支撑滑板92上,所述喷涂支撑滑板92上连接有喷涂驱动滑块97,所述喷涂驱动滑块97和直线导轨95滑动连接,所述喷涂驱动电机91的转轴和喷涂驱动齿轮94连接,所述喷涂驱动齿轮94和喷涂驱动齿条93啮合,所述喷涂驱动齿条93和直线导轨95平行设置,所述喷涂驱动齿条93和直线导轨95均设置在龙门架体4的上端面上,所述喷涂机器人连接板96的一端和喷涂支撑滑板92固定连接,并且喷涂机器人连接板96的另一端延伸出龙门架体4,所述脱模剂喷涂机器人一6和脱模剂喷涂机器人二7均与喷涂机器人连接板96连接。
28.如图9-12所示的工件下料机械人5包括六轴机械臂51和下料夹爪52,所述六轴机械臂51和下料机器人连接板85固定连接,所述下料夹爪52和六轴机械臂51连接;所述下料夹爪52包括夹爪连接块53、夹爪安装架体54、支撑盘55、夹爪驱动组件56和一组工件夹爪本体57,所述支撑盘55和夹爪连接块53远离六轴机械臂51的端部连接,所述夹爪安装架体54上设有一组工件夹爪本体57,并且一组工件夹爪本体57以支撑盘55的中心为圆心按照环形阵列的方式设置,所述夹爪驱动组件56设置在夹爪连接块53上,并且夹爪驱动组件56和夹爪安装架体54连接,所述夹爪安装架体54设置在支撑盘55上,并且夹爪安装架体54和支撑盘55滑动连接,所述夹爪驱动组件56可驱动夹爪安装架体54外扩或者收缩。
29.上述结构中,夹爪安装架体54由一组夹爪支撑架体58,所述一组夹爪支撑架体58以支撑盘55的中心为圆心按照环形阵列的方式设置,所述一组夹爪支撑架体58和一组工件夹爪本体57一一对应设置,所述工件夹爪本体57的一端和夹爪支撑架体58固定连接。
30.此外,夹爪支撑架体58包括夹爪安装板59、支撑滑板510、夹爪导向柱511和限位块512,所述夹爪安装板59固定设置在支撑滑板510远离支撑盘55中心的端部上,所述夹爪导向柱511和支撑滑板510靠近支撑盘55中心端部的上端面固定连接,所述限位块512和夹爪导向柱511远离支撑滑板510的端部固定连接,所述支撑滑板510和支撑盘55滑动连接,所述夹爪导向柱511和夹爪驱动组件56连接,所述支撑盘55上沿径向设有一组滑槽二513,所述一组滑槽二513和一组夹爪支撑架体58一一对应设置,所述支撑滑板510设置在滑槽二513内,并且支撑滑板510可在滑槽二513内滑动。
31.再次,夹爪驱动组件56包括夹爪驱动电机514、夹爪主动轮515和夹爪从动轮516,所述夹爪驱动电机514和夹爪从动轮516均设置在夹爪连接块53上,所述夹爪驱动电机514的转轴和夹爪主动轮515连接,所述夹爪主动轮515和夹爪从动轮516啮合,所述夹爪从动轮516和支撑盘55的中心处于同一轴线上,并且夹爪主动轮515和夹爪从动轮516均处于支撑盘55的水平位置以上,所述夹爪导向柱511和夹爪从动轮516连接。
32.另外,夹爪从动轮516上设有一组导向驱动槽517,并且一组导向驱动槽517以夹爪从动轮516的中心为圆心按照环形阵列的方式设置,所述一组导向驱动槽517和一组夹爪支撑架体58一一对应设置,所述夹爪导向柱511设置在导向驱动槽517内,并且夹爪导向柱511可沿导向驱动槽517移动,所述导向驱动槽517为弧形槽,并且导向驱动槽517沿夹爪从动轮516的径向弯曲设置,所述限位块512和支撑滑板510分别位于夹爪从动轮516的上下两侧,所述限位块512的截面为圆形,并且限位块512的直径和支撑滑板510的宽度均大于导向驱动槽517的宽度。
33.基于上述结构的基础上,一种多工位压铸机的自动脱模装置的工作方法,包括以下步骤:s1、压铸机单元一1和压铸机单元二2内的一组压铸机一11和一组压铸机二21开机,进行工件的压铸,一组压铸机一11和一组压铸机二21可进行相同工件的生产也可以进行不同工件的生产,进行相同工件的压铸时,可使得一组压铸机一11和一组压铸机二21之间错峰开机,这样使得一组压铸机一11和一组压铸机二21处于不同的工作状态;s2、脱模剂喷涂机器人水平驱动单元一9启动,驱动脱模剂喷涂机器人一6移动至压铸机单元一1的一端,然后在压铸机单元一1内的一组压铸机一11上的模具上逐一喷涂脱模剂;s3、步骤s2进行的同时,脱模剂喷涂机器人水平驱动单元二10启动,驱动脱模剂喷涂机器人二7移动至压铸机单元二2的一端,然后在压铸机单元二2内的一组压铸机二21上的模具上逐一喷涂脱模剂;s4、一组压铸机一11和一组压铸机二21分别启动,进行工件的压铸;s5、当一组压铸机一11和一组压铸机二21其中之一压铸完毕,开模后,控制系统通知下料机器人水平驱动单元8此压铸机一11或压铸机二21压铸完毕,需要取出工件;s6、下料机器人水平驱动单元8驱动工件下料机械人5移动至压铸完毕的压铸机一11或压铸机二21位置处,六轴机械臂51驱动下料夹爪52伸入至模具之间的工件位置处,并
且一组工件夹爪本体57插入工件中心内孔中;s7、夹爪驱动电机514启动,带动夹爪主动轮515顺时针旋转,夹爪主动轮515带动夹爪从动轮516旋转,由于夹爪从动轮516旋转,使得夹爪从动轮516上的一组导向驱动槽517旋转,导向驱动槽517的的旋转对夹爪导向柱511支架径向方向的压力,从而推动夹爪导向柱511沿着导向驱动槽517移动,夹爪导向柱511带动工件夹爪本体57移动,此时一组工件夹爪本体57同步移动,以夹爪从动轮516的中心为圆心处于同一圆周向外展开,直至一组工件夹爪本体57与工件中心内孔的内壁相接触,此时一组工件夹爪本体57将工件撑住;s8、六轴机械臂51驱动下料夹爪52移动,从而使得工件从模具上脱模下来;s9、六轴机械臂51驱动下料夹爪52移动,使得下料夹爪52上夹持的工件位于自动传送带31的正上方;s10、夹爪驱动电机514启动,带动夹爪主动轮515逆时针旋转,远离同步骤s7,此时由于夹爪从动轮516是逆时针旋转,因此一组工件夹爪本体57以夹爪从动轮516的中心为圆心处于同一圆周向内收缩,一组工件夹爪本体57与工件中心内孔的内壁分离,工件落在自动传送带31上,自动传送带31进行工件的输送;s11、不断重复上述步骤s2~ s10,能够进行多工位压铸机的连续自动脱模;s12、当一组压铸机一11和一组压铸机二21中多个压铸完成开模时,即工件下料机械人5正在下料时,控制系统进行判断,通知一组压铸机一11和一组压铸机二21等待,控制系统检测工件下料机械人5距离压铸完成的压铸机一11或压铸机二21距离远近,判断下一个下料的压铸机一11或压铸机二21。
34.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。