1.本实用新型涉及装配技术领域,具体为一种金属杆自动整型装配机构。
背景技术:
2.装配工艺规程是规定产品或部件装配工艺规程和操作方法等的工艺文件,是制订装配计划和技术准备,指导装配工作和处理装配工作问题的重要依据。它对保证装配质量,提高装配生产效率,降低成本和减轻工人劳动强度等都有积极的作用。
3.然而,现有的金属杆自动整型装配机构无法实现自动金属杆的导向与整形及装配功能,需要人工去进行操作,且操作复杂,大大增加了工人的劳动强度,且在质量与效率较低,大大降低了实用性。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种金属杆自动整型装配机构,以解决上述背景技术提出的,金属杆自动整型装配机构无法实现自动金属杆的导向与整形及装配功能,需要人工去进行操作,且操作复杂,大大增加了工人的劳动强度,且在质量与效率较低,大大降低了实用性的问题。
6.(二)技术方案
7.为实现上述目的,本实用新型提供如下技术方案:一种金属杆自动整型装配机构,包括龙门架,所述龙门架的前端设置有第一滑轨,所述第一滑轨的外侧固定连接有第一限位块,所述龙门架的后端设置有第一伺服电机,所述第一伺服电机的输出端固定连接有第一电动模组,所述第一电动模组的上端设置有移动块,所述移动块的右侧设置有整形装备机构,所述龙门架的下端设置有产品移载机构,所述产品移载机构的上端固定连接有第二滑轨,所述第二滑轨的上端设置有第二限位块,所述第二限位块的上端固定连有移动架,所述移动架的上端固定连接有产品置物架。
8.优选的,所述第一滑轨呈等间距设置有两个,所述第一伺服电机与第一电动模组传动连接,方便进行移动,实现了自动化装配。
9.优选的,所述第二滑轨呈等间距设置有两个,所述产品移载机构的后端固定连接有第二伺服电机,所述第二伺服电机的输出端固定连接有第二电动模组,所述第二伺服电机与第二电动模组传动连接,所述第二限位块与第二滑轨相互适配,所述产品置物架与产品移载机构通过第二滑轨滑动连接,方便产品置物架进行移动。
10.优选的,所述整形装备机构包括支撑板、第五限位块、第三滑轨、活动块、第三限位块、滑台气缸、第一气缸、第一夹爪、第二夹爪、固定块、第三气缸、第四滑轨、第四限位块、第四气缸和电缸,所述支撑板的后端固定连接有第五限位块,所述支撑板的前端固定第三滑轨,所述第三滑轨外侧设置有第三限位块,所述第三限位块的前端固定连接有活动块,所述活动块的下端固定连接有滑台气缸,所述活动块的前端设置有第一气缸,所述第一气缸的
下端固定连接有第一夹爪,所述活动块的前端设置有固定块,所述固定块的上端固定连接有第三气缸,所述固定块的前端固定连接有第四滑轨,所述第四滑轨的外侧设置有第四限位块,所述第四限位块的前端固定连接有第四气缸,所述第四气缸的左侧设置有第二夹爪,所述支撑板的上端固定连接有电缸,实现了自动装配与整形。
11.优选的,所述第五限位块呈等间距设置有两个,所述第五限位块与第一滑轨相互适配,所述支撑板与龙门架通过第一滑轨滑动连接,所述第三限位块与第三滑轨相互适配,所述活动块与支撑板通过第三滑轨滑动连接,方便将产品进行夹取,与初步整形。
12.优选的,所述第一夹爪与第一气缸通过螺栓可拆卸连接,所述第二夹爪与第四气缸通过螺栓可拆卸连接,所述第四限位块与第四滑轨相互适配,所述第四气缸与固定块通过第四滑轨滑动连接,方便快捷的将产品进行整形与导向。
13.与现有技术相比,本实用新型提供了一种金属杆自动整型装配机构,具备以下有益效果:该金属杆自动整型装配机构,第二伺服电机驱动将产品置物架移动至龙门架的下方,第一伺服电机将整形装备机构移动到产品置物架的上方,电缸驱动将活动块向下移动,通过第一气缸与第一夹爪的配合将金属杆从产品置物架中取出,产品取出过程中,通过滑台气缸夹爪进行初步的整形及导向,在产品到位后通过第三气缸将固定块进行移动,再通过第四气缸与第二夹爪的配合将进行最终整形及导向,实现了金属杆的导向,整形与装配,同时减轻工人的劳动强度,并且在质量、效率上严密可控,具有推广意义。
附图说明
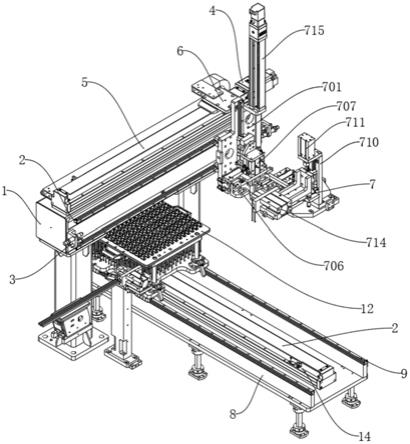
14.图1为本实用新型立体结构示意图;
15.图2为本实用新型龙门架俯视结构示意图;
16.图3为本实用新型产品移载机构正视结构示意图;
17.图4为本实用新型整形装备机构立体结构示意图;
18.图5为本实用新型整形装备机构正视结构示意图;
19.图6为本实用新型第一夹爪立体结构示意图;
20.图7为本实用新型第二夹爪立体结构示意图。
21.其中:1、龙门架;2、第一滑轨;3、第一限位块;4、第一伺服电机;5、第一电动模组;6、移动块;7、整形装备机构;8、产品移载机构;9、第二滑轨;10、第二限位块;11、移动架;12、产品置物架;13、第二伺服电机;14、第二电动模组;701、支撑板;702、第五限位块;703、第三滑轨;704、活动块;705、第三限位块;706、滑台气缸;707、第一气缸;708、第一夹爪;709、第二夹爪;710、固定块;711、第三气缸;712、第四滑轨;713、第四限位块;714、第四气缸;715、电缸。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-7,一种金属杆自动整型装配机构,包括龙门架1,龙门架1的前端设置
有第一滑轨2,第一滑轨2的外侧固定连接有第一限位块3,龙门架1的后端设置有第一伺服电机4,第一伺服电机4的输出端固定连接有第一电动模组5,第一电动模组5的上端设置有移动块6,移动块6的右侧设置有整形装备机构7,第一滑轨2呈等间距设置有两个,第一伺服电机4与第一电动模组5传动连接,方便进行移动,实现了自动化装配;
24.整形装备机构7包括支撑板701、第五限位块702、第三滑轨703、活动块704、第三限位块705、滑台气缸706、第一气缸707、第一夹爪708、第二夹爪709、固定块710、第三气缸711、第四滑轨712、第四限位块713、第四气缸714和电缸715,支撑板701的后端固定连接有第五限位块702,支撑板701的前端固定第三滑轨703,第三滑轨703外侧设置有第三限位块705,第三限位块705的前端固定连接有活动块704,活动块704的下端固定连接有滑台气缸706,活动块704的前端设置有第一气缸707,第一气缸707的下端固定连接有第一夹爪708,活动块704的前端设置有固定块710,固定块710的上端固定连接有第三气缸711,固定块710的前端固定连接有第四滑轨712,第四滑轨712的外侧设置有第四限位块713,第四限位块713的前端固定连接有第四气缸714,第四气缸714的左侧设置有第二夹爪709,支撑板701的上端固定连接有电缸715,实现了自动装配与整形;
25.第五限位块702呈等间距设置有两个,第五限位块702与第一滑轨2相互适配,支撑板701与龙门架1通过第一滑轨2滑动连接,第三限位块705与第三滑轨703相互适配,活动块704与支撑板701通过第三滑轨703滑动连接,方便将产品进行夹取,与初步整形,第一夹爪708与第一气缸707通过螺栓可拆卸连接,第二夹爪709与第四气缸714通过螺栓可拆卸连接,第四限位块713与第四滑轨712相互适配,第四气缸714与固定块710通过第四滑轨712滑动连接,方便快捷的将产品进行整形与导向,龙门架1的下端设置有产品移载机构8,产品移载机构8的上端固定连接有第二滑轨9,第二滑轨9呈等间距设置有两个,产品移载机构8的后端固定连接有第二伺服电机13,第二伺服电机13的输出端固定连接有第二电动模组14,第二伺服电机13与第二电动模组14传动连接,第二限位块10与第二滑轨9相互适配,产品置物架12与产品移载机构8通过第二滑轨9滑动连接,方便产品置物架12进行移动,第二滑轨9的上端设置有第二限位块10,第二限位块10的上端固定连有移动架11,移动架11的上端固定连接有产品置物架12。
26.在使用时,第二伺服电机驱动13将产品置物架12移动至龙门架1的下方,第一伺服电机4将整形装备机构7移动到产品置物架12的上方,电缸715驱动将活动块704向下移动,通过第一气缸707与第一夹爪708的配合将金属杆从产品置物架12中取出,产品取出过程中,通过滑台气缸706夹爪进行初步的整形及导向,在产品到位后通过第三气缸711将固定块710进行移动,再通过第四气缸714与第二夹爪709的配合将进行最终整形及导向,通过电缸715驱动将整形后的产品在装配至产品置物架12的内部,大大增加了金属杆自动整型装配机构实用性。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。