1.本实用新型涉及风力发电机叶片清洁技术领域,具体地说,涉及一种用于清洁风力发电机叶片的机器人。
背景技术:
2.随着风电行业的发展,风力发电机装机量日益增多,风力发电机多安装在环境恶劣的多风地区,叶片作为风力发电机捕获风能的设备,风力发电机叶片上很容易附着灰尘等脏污;当风力机叶片被灰尘等赃污污染后,表面污染物会影响气流的流动性,并且过早地形成涡流,造成风力机输出功率下降,同时影响风力机发电机输出功率下降。
3.随着机器人的快速发展,机器人逐步替代了传统的人工对风力发电机叶片进行清洁的作业;现有的对风力发电机叶片清洁的机器人,通常是借鉴高层建筑的瓷砖或玻璃幕墙清洁的技术,由于高层建筑的瓷砖或玻璃幕墙只有一个连续的正面,而风力发电机叶片则有正反的两个面,现有的风力发电机叶片清洁的机器人在对风力发电机叶片的正面清洁完成后,需要返回到叶片安装的轮毂处,完成机器人的转向后,才能到风力发电机叶片的反面进行清洁作业,从而降低了叶片的清洁效率。
技术实现要素:
4.本实用新型的目的在于提供一种用于清洁风力发电机叶片的机器人,能够在风力发电机叶片的正反两面之间进行自由移动,提高了叶片的清洁效率。
5.本实用新型公开的用于清洁风力发电机叶片的机器人所采用的技术方案是:
6.一种用于清洁风力发电机叶片的机器人,包括清洁组件、检测组件和连接板组合,所述清洁组件包括第一本体,所述第一本体的底部设有第一麦克纳姆轮和若干个喷头组合,所述第一本体的侧部设有第一吸盘组合,所述检测组件包括第二本体,所述第二本体的底部设有第二麦克纳姆轮和摄像头,所述第二本体的侧部设有第二吸盘组合,所述连接板组合包括第一连接板、第二连接板和第三连接板,所述第三连接板的两端分别与第一连接板和第二连接板铰接连接,所述第一连接板和第二连接板分别固定在第一本体和第二本体的底部。
7.作为优选方案,所述第一本体包括第一箱体,所述第一麦克纳姆轮和喷头组合设置在第一箱体的底部,所述第一吸盘组合设置在第一箱体的侧部,所述第一箱体的内部设有第一电机、第一控制单元和喷剂容纳盒,喷剂容纳盒与喷头组合相连,所述第二本体包括第二箱体,所述第二麦克纳姆轮和摄像头设置在第二箱体的底部,所述第二吸盘组合设置在第二箱体的侧部,所述第二箱体的内部设有第二电机和第二控制单元。
8.作为优选方案,所述第一吸盘组合包括第一真空吸盘、第一撑杆、第一连接杆和第二连接杆,所述第一箱体上的侧部开设有跑道形第一通孔,所述第一连接杆的一端穿过第一通孔与第一电机相连、另一端与第二连接杆转动连接,所述第二连接杆与第一撑杆铰接连接,所述第一撑杆远离第二连接杆的一端与第一真空吸盘相连。
9.作为优选方案,所述第一连接杆与第二连接杆转相连的一端为球形的第一转动端,所述第二连接杆与第一连接杆相连的一端开设有与转动端相配合的第一球形凹槽,所述第一转动端位于第一球形凹槽内。
10.作为优选方案,所述第二吸盘组合包括第二真空吸盘、第二撑杆、第三连接杆和第四连接杆,所述第二箱体上的侧部开设有跑道形第二通孔,所述第三连接杆的一端穿过第二通孔与第二电机相连、另一端与第四连接杆转动连接,所述第四连接杆与第二撑杆铰接连接,所述第二撑杆远离第四连接杆的一端与第二真空吸盘相连。
11.作为优选方案,所述第三连接杆与第四连接杆转相连的一端为球形的第二转动端,所述第四连接杆与第三连接杆相连的一端开设有与转动端相配合的第二球形凹槽,所述第二转动端位于第二球形凹槽内。
12.作为优选方案,所述喷头组合包括基座和三个喷头,所述基座的顶端为球形,所述三个喷头均匀设置在基座的顶端。
13.作为优选方案,所述清洁组件和检测组件的数量均为两个,所述连接板组合的数量为四个,所述两个清洁组件和两个检测组件之间通过连接板组合两两相连。
14.本实用新型公开的用于清洁风力发电机叶片的机器人的有益效果是:由于连接板组合包括第一连接板、第二连接板,以及分别与第一连接板和第二连接板铰接连接的第三连接板,第一连接板和第二连接板分别与清洁组件和检测组件相连;当风力发电机叶片的正面清洁完成后,该机器人通过第一麦克纳姆轮、第二麦克纳姆轮、第一吸盘组合和第二吸盘组合向叶片的边缘移动,当清洁组件与叶片分离后,清洁组件可绕第三连接板转动到叶片的反面,并通过第一麦克纳姆轮和第一吸盘组合在叶片的反面移动,检测组件在清洁组件带动下也移动到叶片的反面,从而实现了该机器人在风力发电机叶片的正反两面之间进行自由移动,提高了叶片的清洁效率。
附图说明
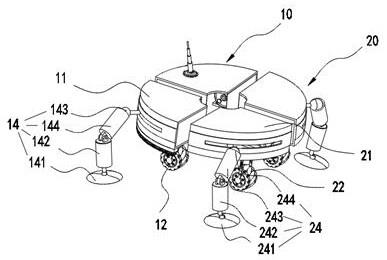
15.图1是本实用新型一种用于清洁风力发电机叶片的机器人的结构示意图。
16.图2是本实用新型一种用于清洁风力发电机叶片的机器人的另一结构示意图。
17.图3是本实用新型一种用于清洁风力发电机叶片的连接板组合的结构示意图。
18.图4是本实用新型一种用于清洁风力发电机叶片的喷头组合的结构示意图。
19.图5是本实用新型一种用于清洁风力发电机叶片的机器人的第一箱体和第二箱体的示意图。
具体实施方式
20.下面结合具体实施例和说明书附图对本实用新型做进一步阐述和说明:
21.请参考图1至图5,一种用于清洁风力发电机叶片的机器人,包括清洁组件10、检测组件20和连接板组合30,清洁组件10包括第一本体11,第一本体11的底部设有第一麦克纳姆轮12和喷头组合13,第一本体11的侧部设有第一吸盘组14合,检测组件20包括第二本体21,第二本体21的底部设有第二麦克纳姆轮22和摄像头23,第二本体21的侧部设有第二吸盘组合24,连接板组合30包括第一连接板31、第二连接板32和第三连接板33,第三连接板33的两端分别与第一连接板31和第二连接板32铰接连接,第一连接31板和第二连接板32分别
固定在第一本体11和第二本体21的底部。
22.当风力发电机叶片的正面清洁完成后,该机器人通过第一麦克纳姆轮12、第二麦克纳姆轮22、第一吸盘组14合和第二吸盘组合24向叶片的边缘移动,当清洁组件10与叶片分离后,清洁组件10可绕第三连接板33转动到叶片的反面,并通过第一麦克纳姆12轮和第一吸盘组合14在叶片的反面移动,检测组件20在清洁组件带动下也移动到叶片的反面,从而实现了该机器人在风力发电机叶片的正反两面之间进行自由移动,提高了叶片的清洁效率。
23.第一本体11包括第一箱体111,第一麦克纳姆轮12和喷头组合13设置在第一箱体111的底部,第一吸盘组合14设置在第一箱体111的侧部,第一箱体111的内部设有第一电机、第一控制单元和喷剂容纳盒,喷剂容纳盒与喷头组合相连,第二本体21包括第二箱体211,第二麦克纳姆轮22和摄像头23设置在第二箱体211的底部,第二吸盘组合24设置在第二箱体211的侧部,第二箱体211的内部设有第二电机和第二控制单元。
24.第一电机驱动第一麦克纳姆轮12和第一吸盘组合14移动,喷剂容纳盒与喷头组合13相连,第一控制单元控制第一电机和喷头组合13。第二电机驱动第二麦克纳姆轮22和第二吸盘组合24移动,第二控制单元控制第二电机和摄像头23。
25.第一吸盘组合14包括第一真空吸盘141、第一撑杆142、第一连接杆143和第二连接杆144,第一箱体111上的侧部开设有跑道形第一通孔1111,第一连接杆143的一端穿过第一通孔1111与第一电机相连、另一端与第二连接杆144转动连接,第二连接杆143与第一撑杆142铰接连接,第一撑杆142远离第二连接杆144的一端与第一真空吸盘141相连。
26.从而第一真空吸盘141可以分别绕第一连接杆143和第二连接杆144转动,更好的适应风力发电机叶片的曲面形状。
27.第一连接杆143与第二连接杆144转相连的一端为球形的第一转动端,第二连接杆144与第一连接杆143相连的一端开设有与转动端相配合的第一球形凹槽,第一转动端位于第一球形凹槽内。第二连接杆144可以绕第一连接杆143呈360度旋转。
28.第二吸盘组合24包括第二真空吸盘241、第二撑杆242、第三连接杆243和第四连接杆244,第二箱体211上的侧部开设有跑道形第二通孔2111,第三连接杆243的一端穿过第二通孔2111与第二电机相连、另一端与第四连接杆244转动连接,第三连接杆243与第四撑杆244铰接连接,第二撑杆242远离第四连接杆244的一端与第二真空吸盘241相连。
29.从而第二真空吸盘241可以分别绕第三连接杆243和第四连接杆244转动,更好的适应风力发电机叶片的曲面形状。
30.第三连接杆243与第四连接杆244转相连的一端为球形的第二转动端,第四连接杆244与第三连接杆243相连的一端开设有与转动端相配合的第二球形凹槽,第二转动端位于第二球形凹槽内。第四连接杆244可绕第三连接杆243呈360度旋转。
31.喷头组合13包括基座131和三个喷头132,基座131的顶端为球形,三个喷头132均匀设置在基座131的顶端。三个喷头132实现360度喷射清洁液,将无机气体激发成等离子态,气象物质被吸附在固体表面,被吸附基团与固体凹面分子发生反应生成产物分子,产物分子解析形成气相,因此,反应残余物脱离叶片的表面。
32.清洁组件10和检测组件20的数量均为两个,连接板组合30的数量为四个,两个清洁组件10和两个检测组件20围成一个圆形,提高了机器人在叶片上移动的稳定性,并且两
个清洁组件10之间通过连接板组合30相连,两个检测组件20之间通过连接板组合30相连,清洁组件10与检测组件20之间通过连接板组合30相连。从而该机器人能够更好的适应叶片的曲面形状。
33.综上所述,通过将机器人分开设为清洁组件10和检测组件20,并且通过连接板组合30实现清洁组件10和检测组件20之间的铰接连接,从而在第一麦克纳姆轮12、第二麦克纳姆轮22、第一吸盘组14合和第二吸盘组合24的相互配合移动下,能够实现在风力发电机叶片的正反两侧进行自由移动,避免了机器人整体需要返回到轮毂处调整移动的方向的操作,从而提高了叶片的清洁效率。
34.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细地说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。