1.本实用新型涉及电动修复技术领域,特别是一种用于重金属污染土壤治理的组合电极及电动修复系统。
背景技术:
2.随着经济社会的发展,农田土壤的污染也在逐步加剧,对生态环境和人类健康构成了严重威胁。目前。土壤污染已成为除大气、水体污染之外的全球第三大环境污染。在我国,受污染耕地多达8000万hm2,占全国耕地面积的63.5%。因此,污染农田土壤的修复是亟待解决的重大问题。
3.农田土壤重金属污染修复种类较多。其中,电动力学修复技术利用插入土壤中的两个电极在污染土壤两端加上电场,在电化学和电动力学的复合作用下,水溶的或吸附在土壤颗粒表层的污染物根据所带电荷的不同向正负电极移动,使污染在电极附近富集或被回收利用,从而达到清洁土壤的目的。
4.近年来,针对重金属污染土壤的电动修复技术研究和应用备受关注。国内的电动修复研究大部分处于实验室研究阶段,主要通过带直流电源、电极、电解槽和土壤室的小型试验装置开展研究。
5.公开号为cn 109719122 a的专利公开了一种带吸附剂的去除土壤(水体)中重金属离子的处理方法及装置,包括四个部分:直流稳压电源、电极阳极、电极阴极和吸附材料。电极阳极材料使用dsa阳极,电极阴极根据不同土壤(或水体)使用镉电极、石墨电极、锌电极、黄铜电极和铅电极之一种,吸附剂选择沸石、活性炭和壳聚糖之一种或两种。采用双层金属丝网包裹活性炭吸附剂和dsa阳极固定于电解槽一侧,再用双层铁丝网包裹活性炭吸附剂和石墨阴极电极固定于电解槽另一侧。在电场作用下,重金属离子(包括重金属酸根离子)向阴极(或阳极)移动,可在阴极(或阳极)被还原为低价金属离子或金属单质或被阴阳两极的吸附剂吸附而富集起来。该专利将污染土壤置于电解槽中处理,需用双层金属丝网包裹吸附剂和电极,操作繁琐,不便于直接用于现场修复。
6.所以迫切需要研发能快速移除土壤中的重金属,可直接用于现场修复的装置,对提高土壤环境质量,保护生态环境以及农作物粮食稳产高产安全生产起到至关重要的作用。
技术实现要素:
7.本实用新型所要解决的技术问题是,针对现有技术不足,提供一种用于重金属污染土壤治理的组合电极,可直接用于土壤原位修复,操作便捷,本实用新型还提供了一种用于重金属污染土壤治理的电动修复系统,提高修复效率。
8.一种用于重金属污染土壤治理的组合电极,包括刚性楔形保护网罩、贴附所述楔形保护网罩内壁设置的过滤材料、竖直设于所述楔形保护网罩内腔的电极、填充于所述楔形保护网罩与所述电极之间的吸附材料,所述电极通过导线与电源连接,所述吸附材料的
顶部纵向开设有出液管安装孔和回液管安装孔。
9.本实用新型所述的组合电极采用刚性楔形保护网罩,电极、吸附材料和过滤材料均设于楔形保护网罩内腔。楔形类似于“倒三角形”,下部尖上部粗,便于插入污染土壤中。可用机械手带动楔形保护网罩向下用力插入污染土壤中,方便快捷,便于自动化控制。出液管安装孔和回液管安装孔中分别相应安装电解液出液管和回液管。
10.进一步地,所述组合电极还包括提手,所述提手固定安装于所述楔形保护网罩的顶端。待材料吸附饱和后,可通过提手将组合电极提起,重新更换组合电极或进行下一块污染土壤的修复。
11.本实用新型还公开了一种用于重金属污染土壤治理的电动修复系统,包括修复单元,所述修复单元包括吸附反应装置和所述组合电极,所述组合电极包括安装于污染土壤中的阳极组合电极和阴极组合电极,其中所述阳极组合电极和所述阴极组合电极中的所述电极均采用板状电极且相互平行,且所述阳极组合电极和所述阴极组合电极之间为修复土壤区域,所述吸附反应装置设于修复土壤区域中。
12.在电场力的作用下,组合电极内侧的污染土壤中的阴离子往阳极迁移,阳离子往阴极迁移。污染农田土壤中重金属阳离子会富集在吸附反应装置和组合电极的吸附材料中或进入阴极电解液中,从而降低农田土壤中有害重金属离子的含量,实现修复农田土壤的目的。
13.进一步地,所述吸附反应装置包括耙身、贯穿所述耙身并与所述耙身固定连接的硬质花管、填充于所述硬质花管内部的吸附材料,所述硬质花管的下部为锥形。可打开硬质花管顶部后填筑和取出吸附材料。
14.进一步地,所述电动修复系统还包括电极工作液单元,所述电极工作液单元包括工作液储液桶、废液桶、依次与所述工作液储液桶连通的输液泵和出液管、依次与所述废液桶连通的废液提升泵和回液管,所述出液管的一端设于出液管安装孔中,所述回液管的一端设于回液管安装孔中。
15.进一步地,所述电动修复系统还包括移动装置、驱动单元和能源动力单元,所述移动装置包括顶板和底板,所述底板上依次开设有第一主开槽、次开槽和第二主开槽,所述驱动单元包括安装于所述移动装置上的驱动电机和与所述驱动电机连接的机械臂,所述能源动力单元与所述驱动单元电连接。移动装置用于修复单元的安装。
16.进一步地,所述电动修复系统还包括控制单元,所述控制单元分别与所述驱动电机、所述输液泵和所述废液提升泵电连接。设定相应的调节装置参数,使得重金属污染修复系统的处理效率在变量内调节可控。
17.进一步地,所述能源动力单元包括直流电源系统和太阳能发电系统,所述太阳能发电系统包括太阳能电池方阵、控制器和蓄电池,所述太阳能电池方阵安装于所述顶板上方,且依次与所述控制器、所述蓄电池和所述直流电源系统电连接。采用太阳能供电,便于户外移动使用。
18.进一步地,所述吸附反应装置还包括吸附反应装置提手,所述吸附反应装置提手固定安装于所述耙身上。提手可以连接机械臂,可由机械臂实现上升和下降运动。
19.进一步地,所述吸附材料为活性炭、生物炭、钢渣其中一种或多种。
20.与现有技术相比,本实用新型所具有的有益效果为:
21.(1)本实用新型中的组合电极可直接自动化控制,利用机械手直接插入污染土壤中,用于土壤原位修复,操作便捷;
22.(2)本实用新型中的电动修复系统将电动修复技术与吸附法相结合,将污染物在电动力的作用下同时向迁移到吸附反应装置和组合电极内的吸附反应材料,通过修复完成后移除吸附反应管实现重金属的原位去除,从根本上解决土壤污染问题;
23.(3)集成开发的一种可移动的农田土壤重金属污染原位修复系统,实现了土壤重金属污染治理的移动式原位快捷修复模式,可用于大面积的、污染深度较浅的农田污染土壤修复;
24.(4)系统具备前期设备安装和修复运行的功能,自动化程度高,可以降低人工成本,可连续作业,具有快速、高效等特点,能够缩短工期;
25.(5)修复系统利用太阳能或风力发电产生的清洁能源,节能、环保,同时也降低了土壤修复成本;
26.(6)本专利不仅适用于无机(重金属等)污染土壤修复,也适用于有机和放射性核素污染土壤修复。
附图说明
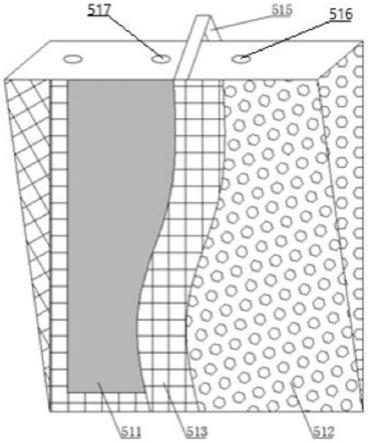
27.图1为组合电极示意图。
28.图2为重金属污染农田电动修复系统框架示意图。
29.图3为重金属污染农田电动修复系统正剖面示意图。
30.图4为重金属污染农田电动修复系统俯视示意图。
31.图5为吸附反应装置示意图。
32.图中:1-移动装置,11-顶板,12-底板,13-第一主开槽,14-第二主开槽,15-次开槽,16-驾驶室;
33.2-能源动力单元,21-直流电源系统,22-太阳能发电系统,221-太阳能电池方阵,222-控制器,223-蓄电池;
34.3-电极工作液单元,31-工作液储液桶,32-废液桶,33-输液泵,34-废液提升泵,35-出液管,36-回液管;
35.4-驱动单元,41-机械臂,42-驱动电机;
36.5-修复单元,51-组合电极,511-电极,512-楔形保护网罩、513-过滤材料,514-吸附材料,515-提手,52-吸附反应装置,521-硬质花管,522-耙身,523-吸附反应装置提手;
37.6-控制单元。
具体实施方式
38.如图2所示,一种可移动式污染土壤电动修复系统,由移动装置1承载的能源动力单元2,电极工作液单元3,驱动单元4,修复单元5和控制单元6组成。
39.如图3所示,移动装置1采用双层可移动装置。移动装置1可为履带、车轮或轨道移动方式,优选履带式。移动装置厢体包含有顶板11和底板12。底板为方形,边长2m~3m。
40.如图2所示,能源动力单元2包括直流电源系统21和太阳能发电系统22。直流电源系统21采用太阳能供电为主、发电机或市电为辅的供电系统,也可由风能供电。直流电源变
压器的直流输出电压为0~220v,电压梯度1~2v/cm。
41.太阳能发电系统22包括太阳能电池方阵221、控制器222和蓄电池223。太阳能电池方阵221安装在可移动装置顶板12上,通过导线依次连接控制器222、蓄电池223和直流电源系统21。
42.如图2-4所示,电极工作液单元3位于移动装置底板11上并避开开槽位置,包括工作液储液桶31、废液桶32、输液泵33、废液提升泵34、出液管35、回液管36组成。工作液储液桶31依次连接输液泵33和出液管35,废液桶32依次连接废液提升泵34和回液管36。
43.驱动单元4包括两组机械臂41及机械臂的驱动电机42。所述机械臂41设于所述移动装置顶板11两端,用于修复单元5的安装。
44.修复单元5包括2组组合电极51和多个吸附反应装置52。如图1所示,组合电极51包括电极511、电极外的楔形保护网罩512、网罩内壁贴附的过滤材料513、楔形保护网罩内填充的吸附材料514。2组电极511分别通过导线与直流电源系统21连接。楔形保护网罩512由刚性多孔绝缘材料制成,宽度略大于电极的宽度,侧面为楔形,顶板设置提手515,留有导线、电极工作液出液管、回液管开孔供连接对应管线,可和机械臂41连接。所述楔形保护网罩512内填充的吸附材料514为可吸附固化重金属的材料,可为活性炭、生物炭、钢渣等。材料吸附饱和后,可回收再生后重复使用。在移动装置底板12两侧分别设置长条形的第一主开槽13和第二主开槽14,可供组合电极上下移动。两组组合电极51分别通过第一主开槽13和第二主开槽14插入双层移动装置1下方土壤内后,2组电极611内侧土壤为修复区域。
45.如图5所示,所述吸附反应装置52为钉耙状,包括多根硬质花管521和固定硬质花管的耙身522。硬质花管521管内填充有吸附材料。所述硬质花管内的吸附材料与楔形保护网罩512内填充的吸附材料相同。硬质花管521的硬质花管底端为锥形,并可打开后填筑和取出吸附材料。耙身522为硬质方形杆,多根硬质花管521通过硬质花管顶端焊接的方式固定在耙身上。在耙身顶部设置吸附反应装置提手521,提手521可以连接机械臂41,由机械臂实现上升和下降运动。在底板第一主开槽13和第二主开槽14的内侧设置多条长条形次开槽15,每个次开槽15可供一个吸附反应装置52上下移动。
46.控制单元6均集成于移动装置1的驾驶室16。控制单元电连接机械臂41、电极工作液单元3的输液泵33和废液提升泵34,并设定相应的调节装置参数,使得重金属污染修复系统的处理效率在变量内调节可控。利用控制单元分别控制输液泵33和废液提升泵34的工作,具体电路连接为现有技术,可参照申请号为202021704251.5的中国专利中控制装置与注药泵之间的电路,或者参考水泵液位控制电路原理图(http://www.gky-ywkz.com/gkyznywkzyhbjkzq/27.html),用于控制输液泵33和废液提升泵34的开关及流速。机械臂的plc控制系统设计可参照机械手plc控制系统设计(http://www.plc100.com/siemens/shili/jixieshou.htm)用于控制机械臂的升降、对组合电极的抓取。机械臂的结构为现有技术,可参照专利基于plc控制的智能调速的机械手(申请号:201520938431.2)。控制单元对太阳能发电系统的控制可参照一种基于太阳能的电动力土壤修复系统(申请号:201721036613.6),或太阳能控制器的工作原理(http://www.elecfans.com/article/88/131/taiyangnen/2018/20180327653025_2.html),控制单元控制太阳能发电系统对各部件进行供电。综上,以上电路连接均为现有技术,在说明书中不再进行详细描述。
47.本实用新型的修复方法,具体步骤和原理如下:
48.1)将上述重金属污染农田电动修复系统移至待修复农田土壤的上方后,将提手515与机械臂41连接,由机械臂41驱动电极向下穿过移动装置1第一主开槽13和第二主开槽开孔14,将组合电极51插入移动装置底板12下方的待修复土壤中。组合电极51安装就位后,释放机械臂41与组合电极51的连接,提升机械臂41。
49.2)将机械臂41连接各吸附反应装置52,驱动吸附反应装置52穿过移动装置底板12长条形次开槽15下降至可移动装置下方土壤中,释放机械臂41与吸附反应管52的连接,提升机械臂41。重复上述操作,将各吸附反应装置52均安装就位。
50.3)将电极工作液单元3的出液管35和回液管36连接至组合电极楔形保护网罩512的对应开孔中。
51.4)开启电极工作液单元3的输液泵33,电解液输入组合电极楔形保护网罩512空腔内。在由直流电源系统21提供的直流电场力的作用下,组合电极内侧的污染土壤中的阴离子往阳极迁移,阳离子往阴极迁移。污染农田土壤中重金属阳离子会富集在吸附反应装置52和组合电极51的吸附材料514中或进入阴极电解液中,从而降低农田土壤中有害重金属离子的含量,实现修复农田土壤的目的。
52.5)对各区域土壤进行检测,待农田土壤内污染物浓度降至修复目标值后,通过机械臂41将组合电极51和吸附反应装置52提升至双层可移动1装置中,即完成农田土壤修复。