1.本实用新型涉及清洁消毒设备技术领域,特别涉及一种自主清洁消毒装置。
背景技术:
2.办公楼内环境复杂,办公桌、椅子等设备摆放错综复杂,桌面类型多种多样,如卫生间洗手台、办公桌、茶水间餐桌等,各种桌面的清洁消毒要求也不相同,需要根据不同场景,制定不同的清洁消毒策略,使用不同的清洁消毒装置。
3.现有的清洁机器人是利用抓取装置进行抓取作业,其中抓取装置由两组丝杠及末端抓取机构组成,定点作业时仅具有两个自由度;而且现有的消毒装置多为地面清洁消毒设计,无法对办公桌、洗手间桌面等具有复杂的空间环境的场景进行清洁消毒,更无法对桌面角落、缝隙等不易到达的死角进行清洁消毒。
技术实现要素:
4.有鉴于此,本实用新型提供一种自主清洁消毒装置,能自主快速清洁或消毒,适应能力强。
5.一种自主清洁消毒装置,包括移动底盘、柔性机械臂和ai视觉模块,柔性机械臂的一端连接在移动底盘上,柔性机械臂的另一端设有对接结构,ai视觉模块安装于对接结构,移动底盘上安装有多个清洁消毒器,ai视觉模块用于识别待清洁区域,柔性机械臂通过对接结构连接清洁消毒器,并将清洁消毒器送达至待清洁区域进行消毒清洁工作。
6.在本实用新型的实施例中,上述清洁消毒器上设有通孔,所述通孔贯穿所述清洁消毒器,当所述清洁消毒器与所述对接结构连接时,所述ai视觉模块通过所述通孔拍摄清洁消毒过程以及实时判断清洁消毒效果。
7.在本实用新型的实施例中,上述对接结构上设有拍摄孔,所述ai视觉模块安装在所述拍摄孔中,当所述清洁消毒器与所述对接结构连接时,所述拍摄孔与所述通孔轴线重合。
8.在本实用新型的实施例中,上述移动底盘上设有多个安装槽,各所述清洁消毒器对应安装在各所述安装槽中。
9.在本实用新型的实施例中,上述移动底盘上还设有用于清洗所述清洁消毒器的清洗槽,所述柔性机械臂可将所述清洁消毒器送达至所述清洗槽。
10.在本实用新型的实施例中,上述移动底盘包括导航模块,所述导航模块用于为所述移动底盘进行移动导航。
11.在本实用新型的实施例中,上述多个清洁消毒器包括夹爪结构,所述夹爪结构包括第一对接座、多个夹爪和夹爪驱动器,所述第一对接座用于与所述对接结构连接,各所述夹爪的一端铰接于所述第一对接座,所述夹爪驱动器安装在所述第一对接座内,所述夹爪驱动器用于驱使各所述夹爪相互靠拢夹持或张开。
12.在本实用新型的实施例中,上述多个清洁消毒器包括吸尘结构,所述吸尘结构包
括第二对接座和吸嘴,所述第二对接座用于与所述对接结构连接,所述吸嘴连接在所述第二对接座上,所述吸尘结构上设有贯穿所述第二对接座和所述吸嘴的吸附通道。
13.在本实用新型的实施例中,上述多个清洁消毒器包括喷雾结构,所述喷雾结构包括第三对接座和喷头,所述第三对接座用于与所述对接结构连接,所述喷头连接在所述第三对接座上,所述喷雾结构上设有贯穿所述第三对接座和所述喷头的喷雾通道。
14.在本实用新型的实施例中,上述多个清洁消毒器包括擦拭结构,所述擦拭结构包括第四对接座、擦拭盘和擦拭驱动器,所述第四对接座用于与所述对接结构连接,所述擦拭盘可转动地连接在所述第四对接座上,所述擦拭驱动器安装在所述第四对接座内,所述擦拭驱动器用于驱使所述擦拭盘转动。
15.本实用新型的自主清洁消毒装置通过移动底盘能够自主移动,可适应办公室等复杂环境,快速高效自主移动到待清洁消毒区域,并利用ai视觉模块对桌面待清洁消毒区域进行自主识别,进而选择合适的清洁消毒器,以及利用柔性机械臂将清洁消毒器送达至待清洁消毒区域,实现自主快速清洁或消毒,适应能力强,能满足例如办公室的办公桌、洗手台、茶水间餐桌等复杂环境清洁或消毒需求,还能对桌面角落、缝隙等不易到达的死角进行清洁消毒。
附图说明
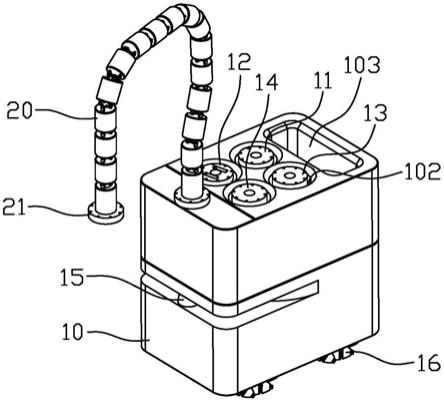
16.图1是本实用新型的自主清洁消毒装置的立体结构示意图。
17.图2至图5是本实用新型的自主清洁消毒装置的连接清洁消毒器时的结构示意图。
18.图6是本实用新型的对接结构的仰视结构示意图。
19.图7是本实用新型的夹爪结构的立体结构示意图。
20.图8是本实用新型的吸尘结构的立体结构示意图。
21.图9是本实用新型的喷雾结构的立体结构示意图。
22.图10是本实用新型的擦拭结构的立体结构示意图。
23.图11是本实用新型的自主清洁消毒装置的仰视结构示意图。
具体实施方式
24.本技术提供了一种自主清洁消毒装置。
25.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分的实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
26.为了便于本领域技术人员的理解,本技术通过以下实施例对本技术提供的技术方案的具体实现过程进行说明。
27.图1是本实用新型的自主清洁消毒装置的立体结构示意图,图2至图5是本实用新型的自主清洁消毒装置的连接清洁消毒器时的结构示意图,图6是本实用新型的对接结构的仰视结构示意图,请参照图1至图6,自主清洁消毒装置包括移动底盘10、柔性机械臂20和ai视觉模块30,柔性机械臂20的一端连接在移动底盘10上,柔性机械臂20的另一端设有对
接结构21,ai视觉模块30安装于对接结构21,移动底盘10上安装有多个清洁消毒器,ai视觉模块30用于识别待清洁区域,柔性机械臂20通过对接结构21连接清洁消毒器,并将清洁消毒器送达至待清洁区域进行消毒清洁工作。
28.本实用新型的自主清洁消毒装置通过移动底盘10能够自主移动,可适应办公室等复杂环境,快速高效自主移动到待清洁消毒区域,并利用ai视觉模块30对桌面待清洁消毒区域进行自主识别,进而选择合适的清洁消毒器,以及利用柔性机械臂20将清洁消毒器送达至待清洁消毒区域,实现自主快速清洁或消毒,适应能力强,能满足例如办公室的办公桌、洗手台、茶水间餐桌等复杂环境清洁或消毒需求,还能对桌面角落、缝隙等不易到达的死角进行清洁消毒。
29.进一步地,如图1所示,清洁消毒器上设有通孔101,通孔101贯穿清洁消毒器,当清洁消毒器与对接结构21连接时,ai视觉模块30通过通孔101拍摄清洁消毒过程以及实时判断清洁消毒效果。
30.进一步地,如图6所示,对接结构21上设有拍摄孔201,ai视觉模块30安装在拍摄孔201中,当清洁消毒器与对接结构21连接时,拍摄孔201与通孔101轴线重合。
31.进一步地,如图1所示,移动底盘10上设有多个安装槽102,各清洁消毒器对应安装在各安装槽102中。在本实施例中,移动底盘10上设有四个安装槽102,但并不以此为限。
32.进一步地,移动底盘10上还设有用于清洗清洁消毒器的清洗槽103,柔性机械臂20可将清洁消毒器送达至清洗槽103。在本实施例中,清洗槽103内设置有消毒液以及旋转刷(图未示),当清洁消毒器完成工作后,柔性机械臂20可将清洁消毒器送达至清洗槽103的消毒液中,旋转刷转动对清洁消毒器进行清洁工作。
33.进一步地,如图1所示,移动底盘10包括导航模块15,导航模块15用于为移动底盘10进行移动导航。在本实施例中,导航模块15包括激光雷达导航器,但并不以此为限。
34.进一步地,图7是本实用新型的夹爪结构的立体结构示意图,如图2和图7所示,多个清洁消毒器包括夹爪结构11,夹爪结构11包括第一对接座111、多个夹爪112和夹爪驱动器(图未示),第一对接座111用于与对接结构21连接,各夹爪112的一端铰接于第一对接座111,夹爪驱动器安装在第一对接座111内,夹爪驱动器用于驱使各夹爪112相互靠拢夹持或张开。在本实施例中,各夹爪112与第一对接座111铰接的端部固定有传动齿轮113,夹爪驱动器与传动齿轮113配合驱使夹爪112绕着铰接处转动。
35.进一步地,图8是本实用新型的吸尘结构的立体结构示意图,如图3和图8所示,多个清洁消毒器包括吸尘结构12,吸尘结构12包括第二对接座121和吸嘴122,第二对接座121用于与对接结构21连接,吸嘴122连接在第二对接座121上,吸尘结构12上设有贯穿第二对接座121和吸嘴122的吸附通道104。在本实施例中,第二对接座121上连接有两个吸嘴122,两个吸嘴122沿通孔101的轴线对称设置。
36.进一步地,自主清洁消毒装置还包括储尘箱(图未示)、吸尘泵(图未示)和吸尘管(图未示),吸尘管的一端与储尘箱连接,吸尘管的另一端与吸附通道104连通,吸尘泵连接在吸尘管上,当吸尘泵抽气时,吸嘴122通过吸附通道104吸附灰尘等杂质。在本实施例中,储尘箱和吸尘泵安装在移动底盘10内,吸尘管顺着柔性机械臂20的长度方向设置,并固定在柔性机械臂20上。
37.进一步地,图9是本实用新型的喷雾结构的立体结构示意图,如图4和图9所示,多
个清洁消毒器包括喷雾结构13,喷雾结构13包括第三对接座131和喷头132,第三对接座131用于与对接结构21连接,喷头132连接在第三对接座131上,喷雾结构13上设有贯穿第三对接座131和喷头132的喷雾通道105。在本实施例中,喷头132上设有多个喷雾通道105,多个喷雾通道105绕着通孔101的轴线相互间隔设置。
38.进一步地,自主清洁消毒装置还包括消毒箱(图未示)、抽液泵(图未示)和喷雾管(图未示),喷雾管的一端与抽液泵连接,抽液泵设置在储尘箱内,喷雾管的另一端与喷雾通道105连通,当抽液泵抽取液体时,喷头132通过喷雾通道105喷洒消毒液。在本实施例中,消毒箱和抽液泵安装在移动底盘10内,喷雾管顺着柔性机械臂20的长度方向设置,并固定在柔性机械臂20上。
39.进一步地,图10是本实用新型的擦拭结构的立体结构示意图,如图5和图10所示,多个清洁消毒器包括擦拭结构14,擦拭结构14包括第四对接座141、擦拭盘142和擦拭驱动器(图未示),第四对接座141用于与对接结构21连接,擦拭盘142可转动地连接在第四对接座141上,擦拭驱动器安装在第四对接座141内,擦拭驱动器用于驱使擦拭盘142转动。在本实施例中,擦拭盘142远离第四对接座141的端面设置有用于擦拭待清洁区域的棉布、海棉等清洁件,根据实际需要可自由选择,并不以此为限。
40.进一步地,清洁消毒器的种类可根据实际需要自由选择,并不以上述为限。
41.进一步地,对接结构21与第一对接座111、第二对接座121、第三对接座131以及第四对接座141的对接方式可采用磁力吸附方式对接、弹性卡扣方式对接、真空吸附的方式对接,根据实际需要可自由选择。
42.进一步地,图11是本实用新型的自主清洁消毒装置的仰视结构示意图,如图11所示,移动底盘10的底部设有四驱全向移动平台,该四驱全向移动平台采用麦克纳姆轮16实现全方位自主移动。
43.不限于上述实施方式中的具体细节,在本技术的技术构思范围内,可以对本技术的技术方案进行多种简单变型,这些简单变型均属于本技术的保护范围。在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本技术对各种可能的组合方式不再另行说明。