1.本技术涉及通风柜技术领域,具体为一种智能通风柜。
背景技术:
2.随着社会经济的快速发展,通风柜的使用日益广泛。通风柜操作面有移动钢化玻璃门,通风柜顶部有排风接口,实验设备置放于柜内进行操作,通过通风柜顶部排风接口使得通风柜内产生负压,防止有害气体溢出柜体操作面,保证了操作人员安全。
3.现有的通风柜结构简单,钢化玻璃视窗包覆边框减小了可视范围、钢化玻璃视窗通过普通直流电机传动无法精确控制移动位置、通风柜操作数据不能通过网络传输汇总;对此申请人提出了一种智能通风柜。
技术实现要素:
4.本技术目的在于提供一种智能通风柜,以解决上述背景技术中提出的现有通风柜结构简单、钢化玻璃视窗位移控制不精确等问题。
5.为实现上述目的,本技术提供如下技术方案:一种智能通风柜,包括金属框架,所述金属框架的两侧固定安装有金属侧板,所述金属框架的后端固定装配有金属背板,所述金属框架的上端固定装配有金属顶板,所述金属顶板设有集气罩装配孔,所述集气罩装配孔一侧对称设有两个柜内照明灯孔,所述柜内照明灯孔一侧装配有位于金属顶板上表面的闭环控制步进电机总成,所述闭环控制步进电机总成一侧装配有无边框钢化玻璃视窗升降传动总成,闭环控制步进电机总成与无边框钢化玻璃视窗升降传动总成通过环形同步带连接;所述金属侧板的前端固定装配有铝质立柱,所述两个铝质立柱顶端内侧固定装配有金属前挡板,所述金属前挡板装配有激光测距传感器,两个所述金属侧板内设有金属侧板内仓,所述金属侧板内仓滑动装配有配重总成;所述铝质立柱内部设有三角空腔,所述三角空腔后侧设置有两个视窗型腔,所述铝质立柱视窗型腔1槽内滑动装配无边框钢化玻璃视窗总成,所述无边框钢化视窗玻璃总成底边对称装配有两个把手,所述无边框钢化视窗玻璃总成底部装配有激光对射传感器,所述铝质立柱视窗型腔2槽内固定装配有无边框钢化玻璃视窗。
6.优选的,所述内仓滑动装配的配重总成和无边框钢化玻璃视窗总成通过开口同步带连接。
7.优选的,所述闭环控制步进电机总成后侧固定装配有位于顶板上表面的一体式电气控制器。
8.所述一体式电气控制器与闭环控制步进电机总成、激光测距传感器、激光对射传感器电气连接。
9.与现有技术相比,本技术的有益效果是:1、本技术通过金属前挡板底边中置安装的激光测距传感器实时探测实验人员的
接近距离,一体式电气控制器做出无边框钢化玻璃视窗总成上升或下降动作执行;2、本技术通过无边框钢化玻璃视窗总成底部的激光对射传感器准确判断视窗总成下降过程中有无物体阻挡 ,从而起到防止碰撞作用;3、本技术通过闭环控制步进电机的运转,使得无边框钢化玻璃视窗总成运动稳定,移动位置准确。
附图说明
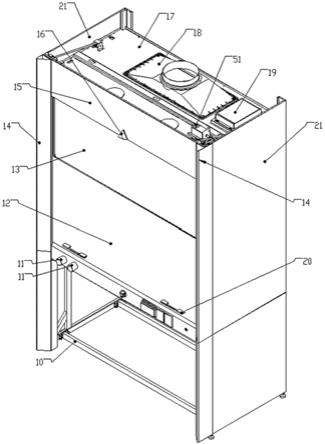
10.图1为本技术的一个实施方式的智能通风柜的示意图;图2为图1的金属框架结构示意图;图3为图1的顶部结构示意图;图4为图1的无边框钢化玻璃视窗总成示意图;图5为图3的无边框钢化玻璃视窗升降传动总成示意图;图6为图1的无边框钢化玻璃视窗总成和配重连接示意图;图7为图1的铝质立柱装配无边框钢化玻璃和无边框钢化玻璃视窗总成顶视示意图;图8为图3的闭环控制步进电机总成和无边框钢化玻璃视窗升降传动总成连接示意图。
11.图中标号含义如下:10、金属框架;11、水气阀;12、无边框钢化玻璃视窗总成;13、无边框钢化玻璃视窗;14、铝质立柱;15、金属前挡板;16、激光测距传感器;17、金属顶板;18、集气罩;19、一体式电气控制器;20、把手;21、金属侧板;22、金属背板;23、金属侧板内仓;40、玻璃视窗上滑轮组;42、玻璃视窗下滑轮组;43、激光对射传感器;50、视窗传动同步轮;51、闭环控制步进电机总成;52、柜内照明灯孔;53、配重传动同步轮;54、集气罩装配孔;60、立式轴承座;61、无边框钢化玻璃视窗升降传动总成;62、镀铬光轴;70、铝质立柱视窗型腔1槽;71、铝质立柱视窗型腔2槽;72、钢化玻璃视窗运行轨道;80、开口同步带;81、环形同步带;90、配重总成。
具体实施方式
12.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
13.如图1-8所示,本技术提供的一种实施例:一种智能通风柜,包括金属框架10,金属框架10的两侧固定装配有金属侧板21,金属框架10的后端固定装配有金属背板22,金属框架10的上端固定装配有金属顶板17,金属顶板17设有集气罩装配孔54,集气罩装配孔54一侧对称设有两个柜内照明灯孔52,柜内照明灯孔52一侧装配有位于金属顶板17上表面的闭环控制步进电机总成51,闭环控制步进电机总成51一侧装配有无边框钢化玻璃视窗升降传动总成61,闭环控制步进电机总成51与无边框钢化玻璃视窗升降传动总成61通过环形同步
带81连接;金属侧板21前侧固定装配有铝质立柱14,两个铝质立柱14顶端内侧固定装配有金属前挡板15,金属前挡板15前端底边中置固定装配有激光测距传感器16,金属前挡板15的下方固定装配有无边框钢化玻璃视窗13,无边框钢化玻璃视窗13下方滑动装配有无边框钢化玻璃视窗总成12,无边框钢化玻璃视窗总成12前端面的底边对称装配有两个把手20,两个金属侧板21内侧设置有金属侧板内仓23,金属侧板内仓23内滑动装配有配重总成90,无边框钢化玻璃视窗总成12和配重总成90通过开口同步带80连接,开口同步带80通过视窗传动同步轮50、配重传动同步轮53传动。
14.如图5所示,无边框钢化玻璃视窗升降传动总成61包括一根镀铬光轴62、4个立式轴承座60、三个视窗传动同步轮50。
15.如图6所示,无边框钢化玻璃视窗总成12和配重总成90通过开口同步带80连接,无边框钢化玻璃视窗总成12的总质量和配重总成90的总质量相等,无边框钢化玻璃视窗总成12可以悬停于可升降范围内。
16.如图1所示,当实验人员进入激光测距传感器16检测范围,无边框钢化玻璃视窗总成12通过闭环控制步进电机总成51带动上升,达到自动开启玻璃视窗的效果;当实验人员离开激光测距传感器16检测范围指定时间后,无边框钢化玻璃视窗总成12通过闭环控制步进电机总成51带动下降,达到自动关闭玻璃视窗的效果。
17.如图1和图4所示,无边框钢化玻璃视窗总成12在下降过程中,激光对射传感器43的对射光线如被遮挡,一体式电气控制器19停止闭环控制步进电机总成51的输出驱动,防止无边框钢化玻璃视窗总成12碰撞遮挡物。
18.一体式电气控制器19与闭环控制步进电机总成51、激光测距传感器16、激光对射传感器43电气连接。
19.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体的连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连;对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
20.在本技术的实施方式描述中,需要理解的是,术语“两侧”、“一侧”、“上端”、“后端”、“内侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术的实施方式和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的定位、以特定的方位构造和操作,因此不能理解为对本技术的实施方式的限制。
21.尽管已经示出和描述了本技术的实施例,本领域的普通技术人员可以理解:在不脱离本技术的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本技术的范围由权利要求极其等同物限定。