1.本实用新型涉及智能闸阀技术领域,具体涉及一种用于调节水位差的智能闸阀。
背景技术:
2.闸门是指修建在河道、渠道或湖、海口,用于关闭和开放泄(放)水通道控制设施,具有拦截水流、控制流量、调节水位、排放泥沙和飘浮物的作用。闸门作为水利工程建设中一个基本的水工设施,在农田灌溉、水位控制、城市供水等诸多工程应用中发挥着巨大的作用。当开启闸门时,可以泄洪、排涝、冲沙、取水或根据下游用水的需要调节流量;关闭闸门时,可以拦洪、挡潮、蓄水抬高上游水位,以满足上游取水或通航的需要。
3.目前作为渠系灌溉控制核心设备的闸门,大部分区域都是采取的人工控制,人工管理成本高,管理水平落后,当上下游水位差较大时,不能及时泄洪、排涝。
技术实现要素:
4.为解决上述技术问题,本实用新型提供了一种用于调节水位差的智能闸阀,可以高效智能的对上下游出现较高水位差的河道进行泄洪、排涝。
5.本实用新型的技术方案是:一种用于调节水位差的智能闸阀,包括呈u字型的阀体、能够沿所述阀体竖直方向向上或向下运动的闸门,所述闸门的左右两侧均设有齿条,所述阀体的内部的两侧均固定设有电机,所述电机的输出端固定连接有齿轮,所述齿轮能够与所述齿条相啮合,所述阀体的外侧且靠近所述阀体的上端设有两水位感应器,所述两水位感应器位于所述闸门的前后两侧,所述阀体的内部还设有控制器;
6.所述水位感应器通过向水面发送超声波,所述水位感应器通过接收经水面反射回来的超声波,所述两水位感应器将感应的数据发送至所述控制器,所述控制器对接收的数据进行距离差分析,当距离差达到预设阈值时,所述控制器控制所述电机正向转动,所述电机通过所述齿轮与所述齿条啮合带动所述闸门向上运动,当距离差低于预设阈值时,所述控制器控制所述电机反向转动,所述电机通过所述齿轮与所述齿条啮合带动所述闸门向下运动。
7.优选的,所述控制器与所述水位感应器和所述电机之间均通过信号连接。
8.优选的,所述阀体的内部设有电源,所述电源能够对所述电机供电。
9.优选的,所述闸门与所述阀体之间设有密封垫,且所述密封垫固定连接在所述阀体的侧面。
10.优选的,所述电机的输出端与所述阀体的连接处设有密封圈。
11.优选的,所述阀体的外侧且靠近所述阀体的上端设有两安装板,所述两安装板位于所述闸门的前后两侧,所述水位感应器固定设在所述安装板的下端。
12.优选的,所述电机与所述阀体之间通过连接板固定连接。
13.本实用新型的有益技术效果是:
14.1、根据上下游河道不同的液位差情况,雨量状况等给每一个闸阀建立智能闸阀,
实现自动闸阀开关的功能,替代人工决定闸阀开关,根据控制器的决策,自动决定在何时关闭闸阀,何时打开闸阀,该种方式智能化程度高,无需通过人力来控制闸门的升降,适合推广使用。
15.2、采用超声波的反射来进行数据的测量,检测精度较高。
附图说明
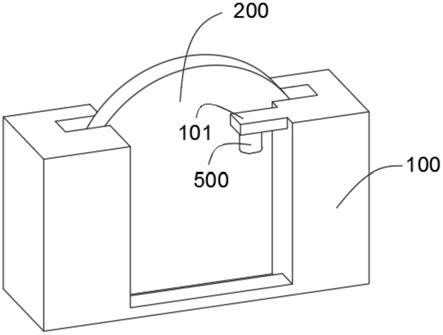
16.图1为本实用新型的整体结构示意图;
17.图2为本实用新型的剖视机构示意图;
18.图3为本实用新型的俯视示意图;
19.图4为本实用新型的控制原理示意图。
20.附图标记为:
21.100、阀体;200、闸门;300、电机;400、齿轮;500、水位感应器;600、控制器;700、电源;800、密封垫;900、密封圈;101、安装板;102、连接板;201、齿条。
具体实施方式
22.为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述,以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
23.如图1-3所示,本实用新型具体涉及一种用于调节水位差的智能闸阀,包括呈u字型的阀体100、能够沿所述阀体100竖直方向向上或向下运动的闸门200,所述闸门200的左右两侧均设有齿条201,所述阀体100的内部的两侧均固定设有电机300,所述电机300的输出端固定连接有齿轮400,所述齿轮400能够与所述齿条201相啮合,所述阀体100的外侧且靠近所述阀体100的上端设有两水位感应器500,所述两水位感应器500位于所述闸门200的前后两侧,所述阀体100的内部还设有控制器600;
24.需要进一步说明的是,所述水位感应器500包括激光发射镜头和激光接收镜头,所述水位感应器500的激光发射镜头向水面发送超声波,激光经过水面的反射,所述水位感应器500的激光接收镜头接收经水面反射回来的超声波,所述两水位感应器500将感应的数据h1和h2发送至所述控制器600,所述控制器600对接收的数据进行距离差h1-h2的结果进行分析,当距离差h1-h2的结果达到预设阈值h时,所述控制器600向所述电机300发送信号,控制所述电机300正向转动,所述电机300通过所述齿轮400与所述齿条201啮合带动所述闸门200向上运动,当距离差h1-h2的结果低于预设阈值时,所述控制器600向所述电机300发送信号,所述控制器600控制所述电机300反向转动,所述电机300通过所述齿轮400与所述齿条201啮合带动所述闸门200向下运动;
25.需要进一步说明的是,所述控制器600与所述水位感应器500之间通过信号连接,所述水位感应器500能将接收的数据信号传输至所述控制器600,所述控制器600与所述电机300之间通过信号连接,所述控制器600能够将信号发送至所述电机300的控制端,用于控制所述电机300正向转动和反向转动。
26.参照图2所示,所述阀体100的内部设有电源700,所述电源700与所述电机300之间
电信号连接,所述电源700能够对所述电机300供电。
27.参照图2所示,所述闸门200与所述阀体100之间设有密封垫800,且所述密封垫800固定连接在所述阀体100的侧面,提高密封性能。
28.参照图2所示,所述电机300的输出端与所述阀体100的连接处设有密封圈900,提高密封性能。
29.参照图3所示,所述阀体100的外侧且靠近所述阀体100的上端设有两安装板101,所述两安装板101位于所述闸门200的前后两侧,所述水位感应器500固定设在所述安装板101的下端,便于安装所述水位感应器500。
30.参照图2所示,所述电机300与所述阀体100之间通过连接板102固定连接,提高电机300与所述阀体100之间的稳定性。
31.该实用新型在使用时,所述闸门200与所述阀体100处于闭合状态,上下游河道不同的液位差情况,雨量状况等,所述水位感应器500能够实时测量出位于闸阀上下游的水位差h1-h2,所述水位感应器500的激光发射镜头向水面发送超声波,激光经过水面的反射,所述水位感应器500的激光接收镜头接收经水面反射回来的超声波,得出所述水位感应器500距离水面之间的距离h1和h2,所述两水位感应器500将感应的数据h1和h2发送至所述控制器600,所述控制器600对接收的数据进行距离差h1-h2的结果进行分析,当距离差h1-h2的结果达到预设阈值h时,所述控制器600向所述电机300发送信号,控制所述电机300正向转动,所述电机300通过所述齿轮400与所述齿条201啮合带动所述闸门200向上运动,闸门200打开,实现泄洪、排涝,当距离差h1-h2的结果低于预设阈值时,所述控制器600向所述电机300发送信号,所述控制器600控制所述电机300反向转动,所述电机300通过所述齿轮400与所述齿条201啮合带动所述闸门200向下运动,闸门200闭合,实现蓄水的功能。
32.以上所述仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。