1.本发明涉及水面垃圾清理领域,具体涉及一种多功能自动化清理船。
背景技术:
2.目前江河湖泊污染情况不容忽视,最主要污染源还是以固体垃圾为主,而现如今有三种技术对水面垃圾进行清理:人工打捞,工作人员利用捞鱼网兜捞取水面漂浮垃圾到船上,运回岸边处理。
3.这种办法人工成本高,工作效率低,且工作环境受光线和天气制约大。另一种技术是通过大型机械化清理船,依靠机械传送带在行进过程中打捞漂浮物,船上安装有粉碎机和液压打包机,可对捞取的海漂垃圾进行先粉碎后打包的处理,垃圾转运至岸边后可直接通过运输车运输至垃圾场处理厂。还有一种技术是the ocean cleanup系统,这种海洋塑料回收装置长达600米,工作时它会自然地凹成c形,像簸箕一样兜住垃圾。装置还有一圈3米深的围网,可以把海面下方的塑料也围住,因为有不少垃圾漂浮在海面下3米深的地方。但这种技术成本昂贵,限制了大面积推广,不适应复杂水文条件的海域、及近海岸。
4.于是现有技术通过垃圾清理船解决技术问题,但实际应用中,现有的垃圾清理船存在以下问题:1、现有技术的垃圾清理船,遍布穿孔的叶片构成卷轮,把河面垃圾归拢,而由于叶片上的穿孔,很容易造成垃圾挂在穿孔上,需要人工进行清理无法持续工作。
5.2、现有技术的垃圾清理船,通过叶片旋转归拢垃圾,然而叶片是直平面,直平面生硬的对垃圾的拍打产生较大的相互作用力,使得垃圾更容易通过穿孔悬挂在叶片上。
6.3、现有技术的垃圾清理船,其归拢臂分类为两种,一种是实心臂,实心臂就会把大量的河水归拢到清理船中,这是不期望的;另一种是空心臂,只有上下两块板组成,然而这种方式垃圾被归拢后又会从两块板之间漏走。
7.4、现有技术的垃圾清理船,通过传送带把垃圾传送到舱室,通过传送带上设有的隔板分隔传送带;然而垃圾中含有大量的水分带入了舱室中,舱室下壁又不可能设排水口,设了排水口船就漏了,因此该问题很难解决。
8.5、现有技术的垃圾清理船,工作时会遇到大尺寸垃圾的情况,大尺寸垃圾也可以被归拢,也可以被传送带传送,但随着传送带上升到一定高度,由于自重就会落下,无法被收集。
9.6、现有技术的垃圾清理船,后方具有舱门,工作人员可以从后舱门将收集完毕的垃圾取出,然而只能从后往前的逐渐取出,效率较低。
10.7、现有技术的垃圾清理工作时,由于垃圾可能会被水草等纠缠在一起形成一大团,聚在一起重量较大,不易被传送带传送。
11.8、现有技术的机械手,由单臂驱动,无法实现灵活的工作。
12.9、现有技术的太阳能板,在工作时会遇到光线不足、无法有效充电的情况。
技术实现要素:
13.为了克服上述问题,本发明提出同时解决上述多种问题的方案。
14.本发明解决其技术问题所采用的技术方案是:一种多功能自动化清理船,包括主体、摆臂、叶片、立柱、传送带、顶盖、后舱门、透水板、隔板、切割板、垃圾舱、夹爪、监控设备、主臂、左臂、右臂、托板、固定环、浮筒、螺旋桨、舵叶、太阳能板、摄像头、探照灯;其中所述摆臂包括上板、下板,所述切割板由多个子板组成,所述叶片包括空白部、穿孔部;其中,所述主体的底部设置有所述螺旋桨与所述舵叶,所述主体的上方设置有所述太阳能板,所述顶盖位于所述太阳能板的后方,所述顶盖的上表面包括左坡面、正面、右坡面,所述顶盖抬起时左坡面、正面、右坡面将光线折射到所述太阳能板上;所述主体的上方设置有所述摄像头与探照灯,所述摄像头与探照灯位于所述太阳能板的前方,所述探照灯数量为二,所述摄像头位于两个探照灯的中间,所述太阳能板在阳光充足时将太阳能转换为电能,所述探照灯提供照明以保证多功能自动化清理船在夜间工作,所述摄像头监测多功能自动化清理船前方动态;所述主体内部设置有垃圾舱,所述主体的左右侧壁上均连接有所述摆臂,所述摆臂向主体的前方延伸,所述摆臂可相对于所述主体摆动;所述摆臂内部设置有所述透水板,所述透水板上端连接所述上板、下端连接所述下板,所述摆臂的前端设有所述立柱,所述立柱上端连接所述上板、下端连接所述下板,所述立柱周围设置有多个所述叶片;所述叶片包括弧面,所述弧面上的至少两段的曲率半径不同;所述叶片的空白部位于叶片的外缘;所述空白部的面积为叶片面积的三分之一,所述穿孔部的面积为叶片面积的三分之二;所述传送带从所述主体的前端向所述垃圾舱的上方延伸,所述传送带上间隔设置多个所述隔板,所述隔板上设置有小孔;所述切割板设置在所述传送带的中央,多个子板沿着传送带的运动方向延伸;所述主体的后端设置有所述后舱门,所述主体的上部设置有所述顶盖,所述顶盖沿着主体长度方向的尺寸为主体上表面长度尺寸的五分之一;在所述传送带的上方设置有机械爪,所述机械爪悬挂在主体的内壁上,所述主体的侧壁内还设置有监控设备;所述机械爪包括夹爪、主臂、左臂、右臂、托板,所述夹爪连接在托板下方,所述托板上方设置有所述主臂、左臂、右臂,所述主臂、左臂、右臂均为两段杆式结构;所述切割板将所述传送带分为左右两部分,传送带的两个部分各自对应一个机械爪;所述主体的两侧均设置有一个浮筒,每个浮筒通过所述固定环固定在所述主体上,每个浮筒的前后端各设有一个固定环。
15.进一步的,所述垃圾舱数量为二。
16.进一步的,所述主臂包括两个支臂,所述支臂为两段杆式结构。
17.进一步的,所述主体的上壁与侧壁之间设有倒角。
18.进一步的,所述后舱门的数量为二。
19.进一步的,所述垃圾舱为主体内的箱体构成。
20.进一步的,所述箱体数量为二。
21.进一步的,所述箱体后侧设有窗口。
22.进一步的,所述垃圾舱包括前舱和后舱。
23.进一步的,所述顶盖设置在所述后舱的上方。
24.本发明的有益效果是:1、针对背景技术提出的第1点,在叶片外缘设置了空白部,空白部不具有穿孔,空白部也是归拢时与垃圾的主要接触部位,这种接触不会造成垃圾缠绕在叶片上,从而减少了人工后续清理。
25.2、针对背景技术提出的第2点,通过叶片的形状设计,工作时通过变化的曲面与垃圾接触,通过一种曲面逐渐的接触代替了直接大面积的同时拍打垃圾,减少相互作用力从而避免垃圾缠绕在穿孔上。
26.3、针对背景技术提出的第3点,在上下板之间设置了透水板,既可以避免垃圾漏出,又能排出不期望归拢的水。
27.4、针对背景技术提出的第4点,使得传送带上的隔板具有透水孔,可以随着传送把多余的水漏出。
28.5、针对背景技术提出的第5点,在传送带上方设置了机械手,当出现大尺寸垃圾时,机械手可以辅助固定/抓取该垃圾,不让其落下,传送带周围有摄像头,可以监控是否出现大尺寸垃圾。
29.6、针对背景技术提出的第6点,在后舱同时设置了后舱门与顶盖,开启顶盖后,可以从后舱的上方伸入工具辅助取出垃圾。
30.7、针对背景技术提出的第7点,在传送带中部设置了切割板,切割板由多个子板组成,随着传送带的运动,切割板将垃圾初步分开,从而避免有过于缠绕的垃圾。
31.8、针对背景技术提出的第8点,不同于现有技术的单臂机械手,设置了一种多臂机械手,多臂中的每个臂都有两段臂组成,从而更灵活的操纵手爪工作。
32.9、针对背景技术提出的第9点,将所述顶盖的上表面设置成围拢面,所述顶盖抬起时围拢面将光线折射到太阳能板上,增加了太阳能板的能源供给。
33.注:上述设计不分先后,每一条都使得本发明相对现有技术具有区别和显著的进步。
附图说明
34.下面结合附图和实施例对本发明进一步说明。
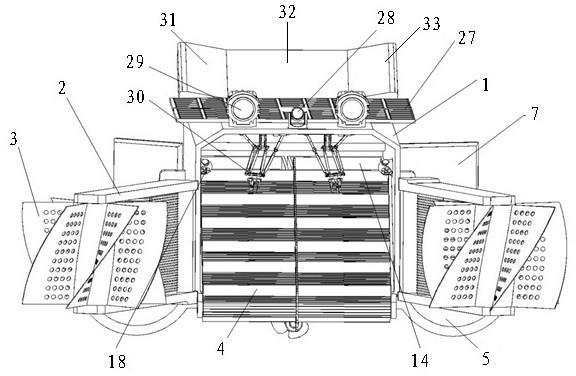
35.图1为本发明的整体结构示意图。
36.图2为本发明舱体示意图。
37.图3为本发明仰视图。
38.图4为本发明侧视图。
39.图5为本发明前侧视角图。
40.图6为本发明卷轮三维图。
41.图7为本发明传送带三维图。
42.图8为本发明多功能模块结构图。
43.图中,附图标记如下:1、主体2、摆臂3、叶片4、传送带5、浮筒6、顶盖7、后舱门8、螺旋桨9、舵叶10、透水板11、固定环12、隔板13、切割板14、垃圾舱15、下板16、上板17、夹爪18、监控设备19、主臂20、左臂21、右臂22、托板23、空白部24、穿孔部25、子板26、立柱27、太阳能板28、摄像头29、探照
灯30、机械爪31、左坡面32、正面33、右坡面。
具体实施方式
44.如图所示:一种多功能自动化清理船,包括主体、摆臂、叶片、立柱、传送带、顶盖、后舱门、透水板、隔板、切割板、垃圾舱、夹爪、监控设备、主臂、左臂、右臂、托板、固定环、浮筒、螺旋桨、舵叶、太阳能板、摄像头、探照灯;其中所述摆臂包括上板、下板,所述切割板由多个子板组成,所述叶片包括空白部、穿孔部;其中,所述主体的底部设置有所述螺旋桨与所述舵叶,所述主体的上方设置有所述太阳能板,所述顶盖位于所述太阳能板的后方,所述顶盖的上表面包括左坡面、正面、右坡面,所述顶盖抬起时左坡面、正面、右坡面将光线折射到所述太阳能板上;所述主体的上方设置有所述摄像头与探照灯,所述摄像头与探照灯位于所述太阳能板的前方,所述探照灯数量为二,所述摄像头位于两个探照灯的中间,所述太阳能板在阳光充足时将太阳能转换为电能,所述探照灯提供照明以保证多功能自动化清理船在夜间工作,所述摄像头监测多功能自动化清理船前方动态;所述主体内部设置有垃圾舱,所述主体的左右侧壁上均连接有所述摆臂,所述摆臂向主体的前方延伸,所述摆臂可相对于所述主体摆动;所述摆臂内部设置有所述透水板,所述透水板上端连接所述上板、下端连接所述下板,所述摆臂的前端设有所述立柱,所述立柱上端连接所述上板、下端连接所述下板,所述立柱周围设置有多个所述叶片;所述叶片包括弧面,所述弧面上的至少两段的曲率半径不同;所述叶片的空白部位于叶片的外缘;所述空白部的面积为叶片面积的三分之一,所述穿孔部的面积为叶片面积的三分之二;所述传送带从所述主体的前端向所述垃圾舱的上方延伸,所述传送带上间隔设置多个所述隔板,所述隔板上设置有小孔;所述切割板设置在所述传送带的中央,多个子板沿着传送带的运动方向延伸;所述主体的后端设置有所述后舱门,所述主体的上部设置有所述顶盖,所述顶盖沿着主体长度方向的尺寸为主体上表面长度尺寸的五分之一;在所述传送带的上方设置有机械爪,所述机械爪悬挂在主体的内壁上,所述主体的侧壁内还设置有监控设备;所述机械爪包括夹爪、主臂、左臂、右臂、托板,所述夹爪连接在托板下方,所述托板上方设置有所述主臂、左臂、右臂,所述主臂、左臂、右臂均为两段杆式结构;所述切割板将所述传送带分为左右两部分,传送带的两个部分各自对应一个机械爪;所述主体的两侧均设置有一个浮筒,每个浮筒通过所述固定环固定在所述主体上,每个浮筒的前后端各设有一个固定环。
45.如图所示:所述垃圾舱数量为二。所述主臂包括两个支臂,所述支臂为两段杆式结构。所述主体的上壁与侧壁之间设有倒角。所述后舱门的数量为二。所述垃圾舱为主体内的箱体构成。所述箱体数量为二。所述箱体后侧设有窗口。所述垃圾舱包括前舱和后舱。所述顶盖设置在所述后舱的上方。
46.上列详细说明是针对本发明可行实施例的具体说明,该实施例并非用以限制本发明的专利范围,凡未脱离本发明所为的等效实施或变更,均应包含于本案的专利范围中。