1.本实用新型属于电机防护技术领域,涉及一种自动清理水面漂浮垃圾的装置。
背景技术:
2.目前,水库、河流漂浮垃圾日趋严重,对水环境造成污染,为了解决水面漂浮垃圾清理的问题,采用人工打捞的方式为主,作业方式劳动力强度大、工作环境恶劣且效率低;因此,研究科学合理的智能化机械清理水面漂浮垃圾已经成为急需的水环境保护措施。
3.现有绝大多数机械化水面漂浮垃圾打捞方式都是打捞船,该方式清理水面漂浮垃圾效率低下,打捞船制造成本高,运动速度低,运动灵活性差,需要投入很大的人力物力。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种自动清理水面漂浮垃圾的装置,采用在两个塔架之间设置承重索和牵引索,承重件的滑轮与承重索配合,牵引机构的牵引轮与牵引索配合,牵引机构和捞漂机构的牵引电机和捞漂电机位于承重件的箱体内,捞漂抓位于箱体外,牵引机构沿牵引索运动,捞漂电机释放或提升捞漂抓,捞漂抓抓取漂浮物,运行速度快,灵活可靠,水面漂浮物清理效率高,投入少,成本低,操作简单方便。
5.为解决上述技术问题,本实用新型所采用的技术方案是:一种自动清理水面漂浮垃圾的装置,它包括塔架、承重件、牵引机构和捞漂机构;所述承重件的滑轮与塔架的承重索配合,牵引索穿过承重件的箱体与牵引机构的牵引轮配合,捞漂机构的捞漂抓位于箱体下部,牵引轮沿牵引索直线运动过程中带动承重件同步运动。
6.所述塔架为中空的框架结构,承重索和牵引索的两端分别与两个塔架连接,其中一个塔架上设置充电桩。
7.所述承重件包括箱体外连接的滑轮,以及位于箱体内的电池和控制器。
8.所述牵引机构包括牵引电机输出端连接的牵引轮,牵引电机与电池和控制器电性连接,牵引电机位于箱体内。
9.所述捞漂机构包括捞漂电机输出端连接的捞漂索,以及与捞漂索连接的捞漂抓,捞漂电机和捞漂抓皆与电池和控制器电性连接,捞漂电机位于箱体内。
10.所述箱体下部设置拦漂排,位于拦漂排上设置监测系统。
11.本实用新型的有益效果在于:
12.采用在航道两侧设置塔架,承重索和牵引索与塔架连接,承重件与承重索配合,牵引机构和捞漂机构与承重件连接,结构简单,组成部分少,成本低。
13.整个捞漂运行路径为水平直线运动和竖直直线运动,相对距离短,运行快,捞漂效率高。
附图说明
14.下面结合附图和实施例对本实用新型作进一步说明。
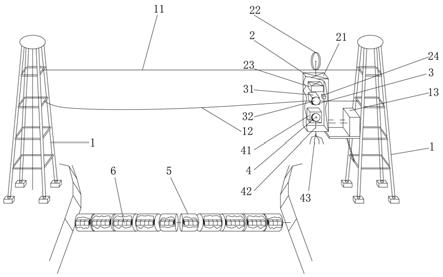
15.图1为本实用新型的结构示意图。
16.图中:塔架1,承重索11,牵引索12,充电桩13,承重件2,箱体21,滑轮22,电池23,控制器24,牵引机构3,牵引电机31,牵引轮32,捞漂机构4,捞漂电机41,捞漂索42,捞漂抓43,拦漂排5,监测系统6。
具体实施方式
17.如图1中,一种自动清理水面漂浮垃圾的装置,它包括塔架1、承重件2、牵引机构3和捞漂机构4;所述承重件2的滑轮22与塔架1的承重索11配合,牵引索12穿过承重件2的箱体21与牵引机构3的牵引轮32配合,捞漂机构4的捞漂抓43位于箱体21下部,牵引轮32沿牵引索12直线运动过程中带动承重件2同步运动。使用时,牵引机构3沿牵引索12运动,捞漂电机41释放或提升捞漂抓43,捞漂抓43抓取漂浮物,运行速度快,灵活可靠,水面漂浮物清理效率高,投入少,成本低,操作简单方便。
18.优选的方案中,所述塔架1为中空的框架结构,承重索11和牵引索12的两端分别与两个塔架1连接,其中一个塔架1上设置充电桩13。使用时,塔架1布设于航道两侧,承重索11和牵引索12与塔架1连接,沿承重索11运动的承重件2运行路径为直线,运行距离短,在电池23的电量不足时,将电池23的插座与充电桩13插接,充电桩13向电池23充电。
19.优选的方案中,所述承重件2包括箱体21外连接的滑轮22,以及位于箱体21内的电池23和控制器24。使用时,电池23向牵引电机31和捞漂电机41及捞漂抓43提供电能,控制器24控制牵引电机31和捞漂电机41的启停,以及控制捞漂抓43的张合。
20.优选的方案中,所述牵引机构3包括牵引电机31输出端连接的牵引轮32,牵引电机31与电池23和控制器24电性连接,牵引电机31位于箱体21内。使用时,牵引电机31驱动牵引轮32旋转沿牵引索12直线运动,与此同时,箱体21随牵引机构3同步运动,滑轮22沿承重索11滑动。
21.优选的方案中,所述捞漂机构4包括捞漂电机41输出端连接的捞漂索42,以及与捞漂索42连接的捞漂抓43,捞漂电机41和捞漂抓43皆与电池23和控制器24电性连接,捞漂电机41位于箱体21内。安装时,捞漂电机41的输出端配合有卷盘,捞漂索42一端缠绕在卷盘上,另一端与捞漂抓43连接,使用时,捞漂电机41驱动卷盘旋转缠绕或释放捞漂索42,捞漂抓43随捞漂索42上升或下降,控制器24控制捞漂抓43张合。
22.优选地,当捞漂索42被释放后,捞漂抓43抵达水面漂浮物上部并张开,继续下降深入水面表层后再闭合,抓取漂浮后,捞漂索42随卷盘缠绕提升捞漂抓43,与此同时,牵引电机31驱动牵引轮32带动箱体21向航道一侧运动,抵达设定区域上空后停止,控制器24控制捞漂抓43张开释放垃圾。
23.优选的方案中,所述箱体21下部设置拦漂排5,位于拦漂排5上设置监测系统6。使用时,当拦漂排5布设于航道中,用于拦截漂浮物,监测系统6用于检测拦漂水域漂浮物的情况,并反馈至后台控制中心,后台控制中心根据漂浮物的量决定是否启动漂浮物清理程序。
24.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
技术特征:
1.一种自动清理水面漂浮垃圾的装置,其特征是:它包括塔架(1)、承重件(2)、牵引机构(3)和捞漂机构(4);所述承重件(2)的滑轮(22)与塔架(1)的承重索(11)配合,牵引索(12)穿过承重件(2)的箱体(21)与牵引机构(3)的牵引轮(32)配合,捞漂机构(4)的捞漂抓(43)位于箱体(21)下部,牵引轮(32)沿牵引索(12)直线运动过程中带动承重件(2)同步运动。2.根据权利要求1所述的自动清理水面漂浮垃圾的装置,其特征是:所述塔架(1)为中空的框架结构,承重索(11)和牵引索(12)的两端分别与两个塔架(1)连接,其中一个塔架(1)上设置充电桩(13)。3.根据权利要求1所述的自动清理水面漂浮垃圾的装置,其特征是:所述承重件(2)包括箱体(21)外连接的滑轮(22),以及位于箱体(21)内的电池(23)和控制器(24)。4.根据权利要求1所述的自动清理水面漂浮垃圾的装置,其特征是:所述牵引机构(3)包括牵引电机(31)输出端连接的牵引轮(32),牵引电机(31)与电池(23)和控制器(24)电性连接,牵引电机(31)位于箱体(21)内。5.根据权利要求1所述的自动清理水面漂浮垃圾的装置,其特征是:所述捞漂机构(4)包括捞漂电机(41)输出端连接的捞漂索(42),以及与捞漂索(42)连接的捞漂抓(43),捞漂电机(41)和捞漂抓(43)皆与电池(23)和控制器(24)电性连接,捞漂电机(41)位于箱体(21)内。6.根据权利要求1所述的自动清理水面漂浮垃圾的装置,其特征是:所述箱体(21)下部设置拦漂排(5),位于拦漂排(5)上设置监测系统(6)。
技术总结
一种自动清理水面漂浮垃圾的装置,它包括塔架、承重件、牵引机构和捞漂机构,通过在两个塔架之间设置承重索和牵引索,承重件的滑轮与承重索配合,牵引机构的牵引轮与牵引索配合,牵引机构和捞漂机构的牵引电机和捞漂电机位于承重件的箱体内,捞漂抓位于箱体外,通过牵引机构沿牵引索运动,捞漂电机释放或提升捞漂抓,捞漂抓抓取漂浮物,运行速度快,灵活可靠,水面漂浮物清理效率高,投入少,成本低,操作简单方便。单方便。单方便。
技术研发人员:李永军 张鑫 朱艳芸 白治朋 张友缘 李卓建 叶飞
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:2021.09.08
技术公布日:2022/2/8