1.本实用新型涉及猕猴桃采摘技术领域,具体为一种多功能智能猕猴桃采摘机械手。
背景技术:
2.猕猴桃果形一般为椭圆状,早期外观呈黄褐色,成熟后呈红褐色,表皮覆盖浓密绒毛,果肉可食用,其内是呈亮绿色的果肉和一排黑色或者红色的种子,是一种品质鲜嫩,营养丰富,风味鲜美的水果。
3.现有的猕猴桃在进行采摘时为了防止对猕猴桃造成损伤需要通过果农手动进行采摘,在进行采摘时有些猕猴桃的高度较高需要果农长期抬起手臂采摘,进而导致采摘猕猴桃的工作强度较大。
技术实现要素:
4.本实用新型的目的在于提供一种多功能智能猕猴桃采摘机械手,以解决上述背景技术中提出的猕猴桃在进行采摘时为了防止对猕猴桃造成损伤需要通过果农手动进行采摘,在进行采摘时有些猕猴桃的高度较高需要果农长期抬起手臂采摘,进而导致采摘猕猴桃的工作强度较大的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种多功能智能猕猴桃采摘机械手,包括圆杆,所述圆杆的一端表面上设置有采摘机构,所述圆杆的内部设置有推出机构;
6.所述采摘机构包括固定块,所述固定块固定连接在圆杆的一端表面上,所述固定块的上端固定连接有橡胶套,所述固定块的侧壁上固定连接有弧板,所述弧板的上端开设有夹槽,所述橡胶套的底部内壁上开设有方孔,所述方孔与插孔相连通,所述方孔的内部插接有推块;
7.所述推出机构包括圆腔,所述圆腔开设在圆杆的内部,所述圆腔的内部滑动连接有移动杆,所述移动杆的一端固定连接有弹簧,所述弹簧卡接在圆腔内部,所述移动杆的表面上固定连接有滑杆,所述滑杆滑动连接在滑槽内部,所述滑槽开设在圆杆的外壁上,所述圆杆的表面上固定连接有握把,所述圆腔的内壁上开设有通孔,所述移动杆的表面上开设有三角槽。
8.优选的,所述推块的下端对称开设有两个斜面。
9.优选的,所述推块的上端开设有与橡胶套相匹配的凹面。
10.优选的,所述推块的下端通过通孔插接在三角槽内部。
11.优选的,所述弹簧远离固定块设置。
12.优选的,所述握把固定连接在圆杆远离固定块的一端表面上。
13.与现有技术相比,本实用新型的有益效果是:通过握住握把带动圆杆移动,圆杆带动固定块移动,固定块带动橡胶套移动到猕猴桃的正下方,然后移动弧板使弧板上的夹槽
与猕猴桃上端的枝条卡接,然后劳动握把带动弧板移动,通过夹槽推动猕猴桃与枝条分离,进而使猕猴桃落入橡胶套内部,无需长期抬臂采摘,进而大大的减轻了果农的工作强度。
附图说明
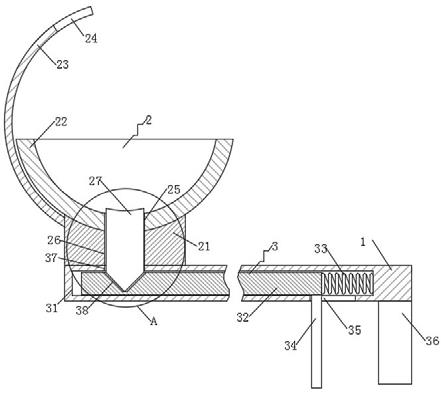
14.图1为本实用新型结构示意图;
15.图2为本实用新型的弧板结构示意图;
16.图3为本实用新型图1中a部分放大图;
17.图4为本实用新型的圆三角槽结构示意图。
18.图中:1、圆杆;2、采摘机构;21、固定块;22、橡胶套;23、弧板;24、夹槽;25、方孔;26、插孔;27、推块;3、推出机构;31、圆腔;32、移动杆;33、弹簧;34、滑杆;35、滑槽;36、握把;37、通孔;38、三角槽。
具体实施方式
19.请参阅图1-4,本实用新型提供一种技术方案:一种多功能智能猕猴桃采摘机械手,包括圆杆1,圆杆1的一端表面上设置有采摘机构2,圆杆1的内部设置有推出机构3;
20.采摘机构2包括固定块21,固定块21固定连接在圆杆1的一端表面上,固定块21的上端固定连接有橡胶套22,固定块21的侧壁上固定连接有弧板23,弧板23的上端开设有夹槽24,橡胶套22的底部内壁上开设有方孔25,方孔25与插孔26相连通,方孔25的内部插接有推块27,握住握把36带动圆杆1移动,圆杆1带动固定块21移动,固定块21带动橡胶套22移动到猕猴桃的正下方,然后移动弧板23使弧板23上的夹槽24与猕猴桃上端的枝条卡接,然后劳动握把36带动弧板23移动,通过夹槽24推动猕猴桃与枝条分离,进而使猕猴桃落入橡胶套22内部;
21.推出机构3包括圆腔31,圆腔31开设在圆杆1的内部,圆腔31的内部滑动连接有移动杆32,移动杆32的一端固定连接有弹簧33,弹簧33卡接在圆腔31内部,移动杆32的表面上固定连接有滑杆34,滑杆34滑动连接在滑槽35内部,滑槽35开设在圆杆1的外壁上,圆杆1的表面上固定连接有握把36,圆腔31的内壁上开设有通孔37,移动杆32的表面上开设有三角槽38,回移圆杆1带动橡胶套22回移,拉动滑杆34在滑槽35内部滑动,使滑杆34带动移动杆32移动,移动杆32带动三角槽38移动,进而通过三角槽38的斜面推动卡接在三角槽38内部的推块27上移,进而使推块27推动猕猴桃从橡胶套22内部移出方便拿取,无需长期抬臂采摘,进而大大的减轻了果农的工作强度。
22.优选的,推块27的下端对称开设有两个斜面,进而通过斜面使三角槽38可推动推块27上移。
23.优选的,推块27的上端开设有与橡胶套22相匹配的凹面,进而防止推块27对猕猴桃造成损伤。
24.优选的,推块27的下端通过通孔37插接在三角槽38内部,进而使推块27受到推动时通过通孔37的限制上下移动。
25.优选的,弹簧33远离固定块21设置,进而使弹簧33推动移动杆32向固定块21方向移动。
26.优选的,握把36固定连接在圆杆1远离固定块21的一端表面上,方便把握握把36带
动圆杆1移动。
27.具体的,使用本实用新型时,首先握住握把36带动圆杆1移动,圆杆1带动固定块21移动,固定块21带动橡胶套22移动到猕猴桃的正下方,然后移动弧板23使弧板23上的夹槽24与猕猴桃上端的枝条卡接,然后劳动握把36带动弧板23移动,通过夹槽24推动猕猴桃与枝条分离,进而使猕猴桃落入橡胶套22内部,然后回移圆杆1带动橡胶套22回移,拉动滑杆34在滑槽35内部滑动,使滑杆34带动移动杆32移动,移动杆32带动三角槽38移动,进而通过三角槽38的斜面推动卡接在三角槽38内部的推块27上移,进而使推块27推动猕猴桃从橡胶套22内部移出方便拿取,无需长期抬臂采摘,进而大大的减轻了果农的工作强度。
技术特征:
1.一种多功能智能猕猴桃采摘机械手,包括圆杆(1),其特征在于:所述圆杆(1)的一端表面上设置有采摘机构(2),所述圆杆(1)的内部设置有推出机构(3);所述采摘机构(2)包括固定块(21),所述固定块(21)固定连接在圆杆(1)的一端表面上,所述固定块(21)的上端固定连接有橡胶套(22),所述固定块(21)的侧壁上固定连接有弧板(23),所述弧板(23)的上端开设有夹槽(24),所述橡胶套(22)的底部内壁上开设有方孔(25),所述方孔(25)与插孔(26)相连通,所述方孔(25)的内部插接有推块(27);所述推出机构(3)包括圆腔(31),所述圆腔(31)开设在圆杆(1)的内部,所述圆腔(31)的内部滑动连接有移动杆(32),所述移动杆(32)的一端固定连接有弹簧(33),所述弹簧(33)卡接在圆腔(31)内部,所述移动杆(32)的表面上固定连接有滑杆(34),所述滑杆(34)滑动连接在滑槽(35)内部,所述滑槽(35)开设在圆杆(1)的外壁上,所述圆杆(1)的表面上固定连接有握把(36),所述圆腔(31)的内壁上开设有通孔(37),所述移动杆(32)的表面上开设有三角槽(38)。2.根据权利要求1所述的一种多功能智能猕猴桃采摘机械手,其特征在于:所述推块(27)的下端对称开设有两个斜面。3.根据权利要求1所述的一种多功能智能猕猴桃采摘机械手,其特征在于:所述推块(27)的上端开设有与橡胶套(22)相匹配的凹面。4.根据权利要求1所述的一种多功能智能猕猴桃采摘机械手,其特征在于:所述推块(27)的下端通过通孔(37)插接在三角槽(38)内部。5.根据权利要求1所述的一种多功能智能猕猴桃采摘机械手,其特征在于:所述弹簧(33)远离固定块(21)设置。6.根据权利要求1所述的一种多功能智能猕猴桃采摘机械手,其特征在于:所述握把(36)固定连接在圆杆(1)远离固定块(21)的一端表面上。
技术总结
本实用新型公开了一种多功能智能猕猴桃采摘机械手,包括圆杆,圆杆的一端表面上设置有采摘机构,圆杆的内部设置有推出机构,采摘机构包括固定块,固定块固定连接在圆杆的一端表面上,固定块的上端固定连接有橡胶套,固定块的侧壁上固定连接有弧板,弧板的上端开设有夹槽,橡胶套的底部内壁上开设有方孔,方孔与插孔相连通,通过本实用新型无需长期抬臂采摘,进而大大的减轻了果农的工作强度。进而大大的减轻了果农的工作强度。进而大大的减轻了果农的工作强度。
技术研发人员:雷丁懿 王涵 赵澜鑫 陶世一 王皓 王铭珠 黄海鹏 高超 石沛钶 姚兴 王科
受保护的技术使用者:河南师范大学
技术研发日:2021.09.08
技术公布日:2022/2/11