1.本实用新型属于养殖设备技术领域,尤其涉及一种自动喂食机。
背景技术:
2.水产养殖业是我国渔业的重要组成部分,也是渔业发展的主要增长点。我国的渔业发展重心已由“捕捞为主”向“养殖为主”的转移,促使水产养殖业发生了巨大变化,但目前我国水产养殖业的设施、设备制约着水产养殖业的进一步发展。现有的水产养殖大多还是依靠人工手动进行投食,劳动力大,费时费力。
技术实现要素:
3.本实用新型的目的在于提供一种自动喂食机,以解决现有技术中依靠人工手动进行投食带来的劳动力大、费时费力的问题。
4.为了达到上述目的,本实用新型的技术方案为:自动喂食机,包括机体和轨道,所述机体内设有投喂件和用于存储食物的容纳腔,所述投喂件用于将容纳腔中的食物投放到养殖池内;若干所述养殖池的上方或周边都连接有所述轨道,所述机体上设有行走机构,所述行走机构能够在轨道上移动。
5.进一步,所述行走机构包括设于机体底部的行走轮,所述行走轮由驱动组件驱动。
6.进一步,所述机体内安装有电池,所述电池为所述驱动组件供电。
7.进一步,所述轨道的起点设有充电座,所述充电座用于给电池充电,所述电池连接有充电插头,所述充电插头能够与所述充电座配合使用。
8.进一步,还包括控制器,所述驱动组件包括与控制器连接的伺服电机、第一行程开关和第二行程开关;所述第一行程开关位于所述轨道的起点,所述第二行程开关位于所述轨道的终点,所述第一行程开关用于关闭所述伺服电机,所述第二行程开关用于改变所述伺服电机的转动方向。
9.进一步,所述投喂件采用电磁阀,所述电磁阀与控制器连接,所述容纳腔的底部设有投喂口,所述电磁阀用于控制所述投喂口的启闭,所述投喂口与养殖池正对。
10.本技术方案的工作原理在于:控制器启动伺服电机,伺服电机带动行走轮转动,使得机体在轨道上沿着养殖池行走。控制器根据预先设定的程序,对电磁阀进行启闭,从而实现对养殖池进行食物的投放。当机体行走到轨道的末端时,触碰到第二行程开关,第二行程开关改变伺服电机的转动方向。当机体行走到轨道的初始位置时,触碰到第二行程开关,第二行程开关关闭伺服电机。
11.本技术方案的有益效果在于:
①
本技术方案能够实现食物的自动投喂,避免了依靠人工手动进行投食带来的劳动力大、费时费力的问题。
②
不进行投喂时,将机体的充电插头插入充电座上进行充电。
附图说明
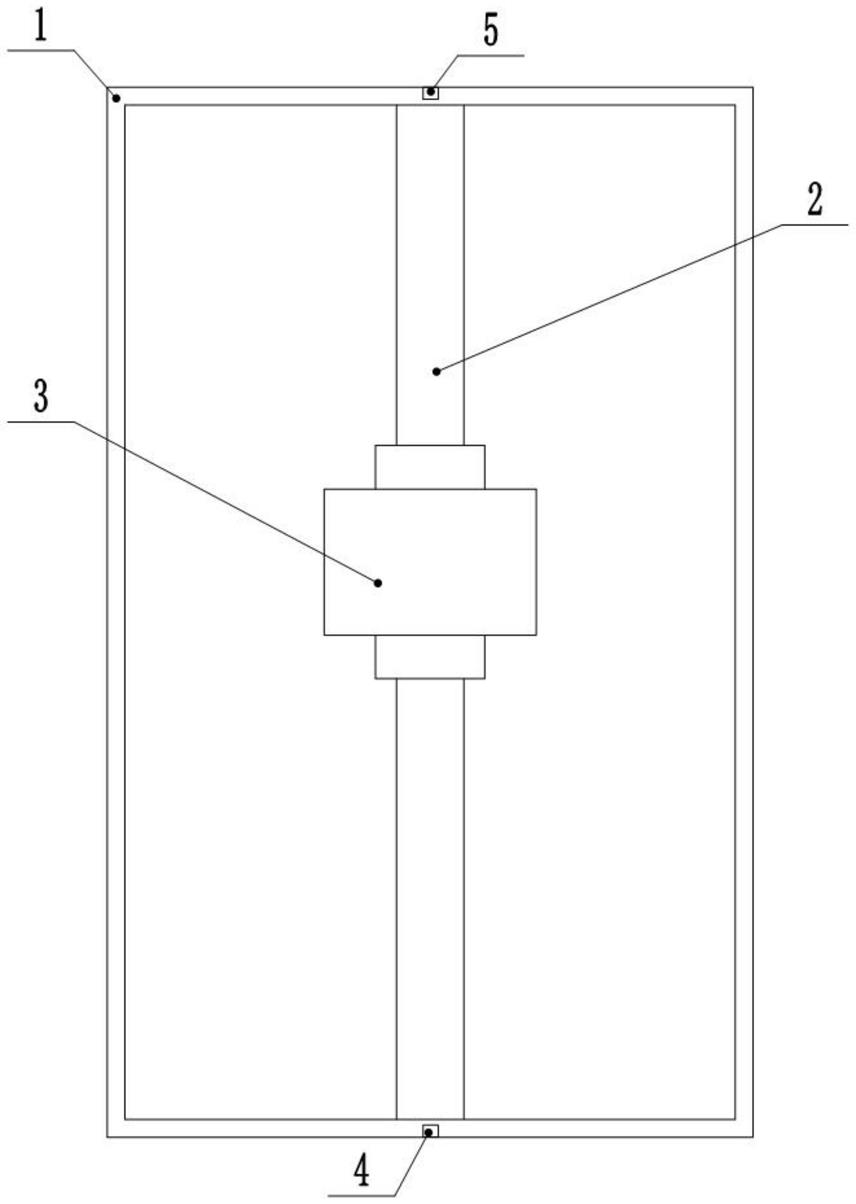
12.图1为本实用新型自动喂食机的俯视图;
13.图2为图1的侧视图;
14.图3为本实用新型自动喂食机的连接图。
具体实施方式
15.下面通过具体实施方式进一步详细说明:
16.说明书附图中的附图标记包括:养殖池1、轨道2、机体3、第一行程开关4、第二行程开关5、控制器6、投喂件7、驱动组件8、伺服电机9。
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.实施例基本如附图1-3所示:自动喂食机,包括控制器6、机体3和轨道2,控制器6用于控制各部件的运行。机体3内设有投喂件7和用于存储食物的容纳腔,投喂件7用于将容纳腔中的食物投放到养殖池1内;若干养殖池1的上方或周边都连接有轨道2,机体3上设有行走机构,行走机构能够在轨道2上移动。行走机构包括设于机体3底部的行走轮,行走轮由驱动组件8驱动。机体3内安装有电池,电池为驱动组件8供电。轨道2的起点设有充电座,充电座用于给电池充电,电池连接有充电插头,充电插头能够与充电座配合使用。驱动组件8包括与控制器6连接的伺服电机9、第一行程开关4和第二行程开关5;第一行程开关4位于轨道2的起点,第二行程开关5位于轨道2的终点,第一行程开关4用于关闭伺服电机9,第二行程开关5用于改变伺服电机9的转动方向。投喂件7采用电磁阀,电磁阀与控制器6连接,容纳腔的底部设有投喂口,电磁阀用于控制投喂口的启闭,投喂口与养殖池1正对。
19.具体实施过程如下:
20.控制器6启动伺服电机9,伺服电机9带动行走轮转动,使得机体3在轨道2上沿着养殖池1行走。控制器6根据预先设定的程序(例如根据行走的时间或路程来确定电磁阀的启闭),对电磁阀进行启闭,从而实现对养殖池1进行食物的投放。当机体3行走到轨道2的末端时,触碰到第二行程开关5,第二行程开关5改变伺服电机9的转动方向。当机体3行走到轨道2的初始位置时,触碰到第二行程开关5,第二行程开关5关闭伺服电机9。
21.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
22.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完
善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本申请要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
技术特征:
1.自动喂食机,其特征在于:包括机体(3)和轨道(2),所述机体(3)内设有投喂件(7)和用于存储食物的容纳腔,所述投喂件(7)用于将容纳腔中的食物投放到养殖池(1)内;若干所述养殖池(1)的上方或周边都连接有所述轨道(2),所述机体(3)上设有行走机构,所述行走机构能够在轨道(2)上移动。2.根据权利要求1所述的自动喂食机,其特征在于:所述行走机构包括设于机体(3)底部的行走轮,所述行走轮由驱动组件(8)驱动。3.根据权利要求2所述的自动喂食机,其特征在于:所述机体(3)内安装有电池,所述电池为所述驱动组件(8)供电。4.根据权利要求2所述的自动喂食机,其特征在于:所述轨道(2)的起点设有充电座,所述充电座用于给电池充电,所述电池连接有充电插头,所述充电插头能够与所述充电座配合使用。5.根据权利要求2所述的自动喂食机,其特征在于:还包括控制器(6),所述驱动组件(8)包括与控制器(6)连接的伺服电机(9)、第一行程开关(4)和第二行程开关(5);所述第一行程开关(4)位于所述轨道(2)的起点,所述第二行程开关(5)位于所述轨道(2)的终点,所述第一行程开关(4)用于关闭所述伺服电机(9),所述第二行程开关(5)用于改变所述伺服电机(9)的转动方向。6.根据权利要求5所述的自动喂食机,其特征在于:所述投喂件(7)采用电磁阀,所述电磁阀与控制器(6)连接,所述容纳腔的底部设有投喂口,所述电磁阀用于控制所述投喂口的启闭,所述投喂口与养殖池(1)正对。
技术总结
本实用新型属于养殖设备技术领域,具体公开了自动喂食机,包括机体和轨道,所述机体内设有投喂件和用于存储食物的容纳腔,所述投喂件用于将容纳腔中的食物投放到养殖池内;若干所述养殖池的上方或周边都连接有所述轨道,所述机体上设有行走机构,所述行走机构能够在轨道上移动。上述自动喂食机,能够解决现有技术中依靠人工手动进行投食带来的劳动力大、费时费力的问题。费力的问题。费力的问题。
技术研发人员:赖拉汗 黄玉东 李春
受保护的技术使用者:重庆煜鑫渔蔬园农业科技有限公司
技术研发日:2021.09.17
技术公布日:2022/2/11