用于决定待测量物体的制造空间像的方法
1.相关申请的交叉引用
2.德国专利申请案de 10 2019 208 552.0的内容以引用的方式并入本文。
技术领域
3.本发明关于一种用于决定待测量物体的制造空间像的方法,其中制造空间像由在光学制造系统的照明和成像条件下进行照明和成像导致。此外,本发明关于一种计量系统,其包含用于执行该方法的光学测量系统。
背景技术:
4.从us 2017/0131 528 a1(并行文件wo 2016/0124 425 a2)以及从us 2017/0132782 a1中已知一种计量系统。wo 2017/207 297 a1揭露了一种用于预测光刻掩模的成像结果的方法。
技术实现要素:
5.本发明的目的是开发一种在引言中提到的类型的决定方法,使得即使在光学制造系统的严格照明和成像条件下,也减轻了对决定方法中所使用的光学测量系统的要求。
6.根据本发明,此目的通过具有权利要求1中所指定特征的决定方法来实现。
7.根据本发明,已经认识到,即使对于光学制造系统的严格照明和成像条件,也可使用光学测量系统来决定制造空间像,在该光学测量系统中,使用了与制造照明设定相比不同的测量照明设定。接着,可配置测量照明设定,使得它可在光学测量系统内更简单地实现,其结果为放宽了对光学测量系统的总体要求。特别地,有可能模拟制造空间像,其在测量机构中将无法实现、或将难以实现,因为这将需要例如在测量机构中无法制造、或难以制造的光阑(stop)结构。
8.基于模拟的制造空间像,即,基于决定方法的结果,可优化所测量物体的物体结构,直到模拟的制造空间像对应于预定义的空间像。因此,决定方法可为用于优化物体结构的迭代程序的一部分,直到已针对用以产生影像结构的光学制造系统的照明和成像条件对物体结构进行优化,其又为(举例来说,如果光学制造系统用于生产微结构或纳米结构的半导体部件)生产具有极高分辨率的相应结构半导体部件的起点。
9.测量照明设定包含光学测量系统的预定义数值照明孔径。该预定义的照明孔径由照明光瞳的边缘轮廓预定义。
10.在决定方法中,有可能使用从van den broek等人在phys.rev.lett 109,245502(2012)中提出的技术文章“通过动态电子散射的反转获取三维物体电位的方法(method for retrieval of the three-dimensional object potential by inversion of dynamical electron scattering)”以及从wo 2017/207 297 a1中已知的物体结构的重建方法。
11.举例来说,在物体结构的优化中,可识别并选择性地修复物体缺陷。
12.已证明根据权利要求2的通过一设定光阑对测量照明设定进行预定义是值得的。
13.根据权利要求3的具有照明光瞳的椭圆边缘轮廓的制造照明设定为严格的制造照明设定的一示例。
14.相比之下,这同样适用于根据权利要求3的自由形式或smo(光源掩模优化)照明设定。这种自由形式的照明设定无法用任何标准化的照明设定“传统”、“环形”、“偶极”或“多极”来描述,而是由对照明光在照明光瞳内撞击的光瞳区域的配置的自由调整来区分。关于smo方法,参考d.zhang等人在proceedings spie 8326,optical microlithography xxv,83261v(13 march 2012)中所提出的技术文章“光源掩模优化方法(smo)以及在实际全晶片光学邻近校正中的应用(source mask optimization methodology(smo)and application to real full chip optical proximity corrections)”。
15.根据权利要求5的具有变化的照明强度的制造照明设定为严格的制造照明设定的另一示例。最小照明强度可大于最大照明强度的1%或大于10%。最小照明强度可小于最大照明强度的50%。
16.根据权利要求6的制造照明设定已被证明在光学制造系统中是值得的。照明光瞳内的被照明的个别区域可彼此分开地配置。
17.几乎不可能或根本不可能通过设定光阑来预定义这样的制造照明设定,因为这种类型的设定光阑的生产费用(如果首先这种设定光阑是可生产的)会非常高。
18.当预定义一制造照明设定时,根据权利要求7至9的个别区域配置或个别区域布置同样被证明是值得的。个别区域可具有圆形边界;然而,这并非强制性的。
19.根据权利要求10的计量系统的优点对应于前文中已参照根据本发明的收敛方法进行解释的优点。
20.计量系统可测量为投射曝光而提供的光刻掩模,其用以产生具有极高结构分辨率(其例如优于30nm、特别是可优于10nm)的半导体部件。
21.根据权利要求11的计量系统是可灵活使用的。计量系统可包含多个可改变的设定光阑,其可通过一更换安装架以自动方式彼此互换。
附图说明
22.下文将参照附图更详细地解释本发明的示例性实施例。在附图中:
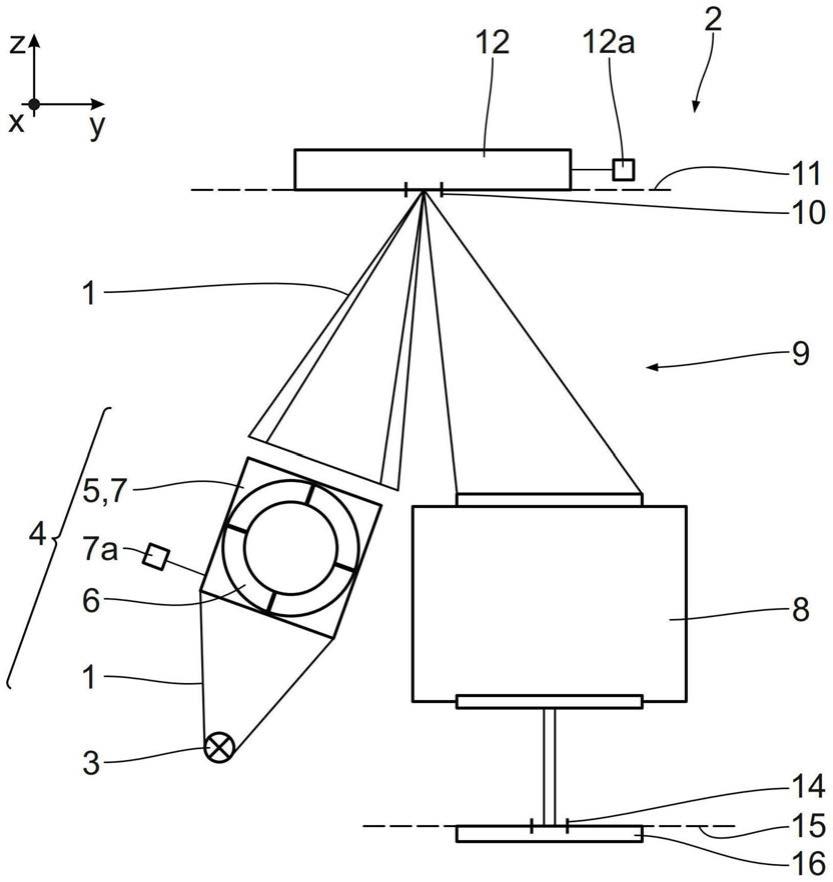
23.图1示意性地显示了用于决定形式为光刻掩模的待测量物体的空间像的计量系统,其包含照明系统、成像光学单元和空间解析检测装置;
24.图2显示了方法的主要方法步骤的顺序,在该方法中使用了根据图1的计量系统,用于决定待测量物体的空间像,其为在光学制造系统的照明和成像条件下进行照明和成像的结果;
25.图3更详细地但仍示意性地显示了使用根据图1的计量系统的成像光学单元对光刻掩模进行成像;以及
26.图4显示了影响所决定制造空间像的输入变量的示意可视化,即特别是涉及成像待测量物体的光学制造系统的数据、重建的物体结构的数据、以及有关具有制造照明设定(其不同于根据图1的计量系统的测量照明设定)的光学制造系统的照明条件的数据。
具体实施方式
27.图1以对应于子午截面的截面图显示了计量系统2中的euv照明光或成像光1的光束路径。照明光1由euv光源3产生。
28.为了助于位置关系的呈现,下文中使用笛卡尔xyz坐标系统。在图1中,x轴垂直于绘图平面并从绘图平面伸出。y轴在图1中向右延伸。z轴在图1中向上延伸。
29.光源3可为激光等离子体源(lpp;激光产生等离子体)或放电源(dpp;放电产生等离子体)。原则上,也可使用基于同步加速器的光源,例如自由电子激光器(fel)。照明光1的使用波长可在5nm至30nm之间的范围内。原则上,在投射曝光装置2的变型的情况下,也可能使用用于某些其他使用光波长的光源,例如用于193nm的使用波长。
30.在光源3所属的计量系统2的照明系统的照明光学单元(未更详细示出)中,对照明光1进行调节,以提供照明的特定照明设定5,即特定的照明角度分布。该照明设定5与照明光1在照明系统4的照明光学单元的照明光瞳中的特定强度分布相对应。
31.照明设定5的一示例以在绘图平面中表示为环形照明设定的方式示意性地显示于图1中,其设有腹板(web)并具有总共四个大致呈象限形状的照明极6。实际上,存在有照明设定5的照明光瞳布置为垂直于图1中的绘图平面并垂直于照明光1通过照明光瞳的传播方向。
32.在照明光瞳中,在各个情况下在照明极6的位置处具有一预定义照明强度,此外则没有照明强度。照明设定5可由设定光阑7来预定义,该设定光阑7在照明极6的位置处透射照明光1并阻挡在照明极6周围的照明光。此种设定光阑7的一示例为具有通孔的金属板,其形状与照明极6的形状完全对应。设定光阑布置在计量系统2的照明光学单元的光瞳平面中。
33.借助于图1所示的更换支架7a,可将设定光阑7更换为用于改变相应测量照明设定的更换设定光阑。
34.代替所显示的四极照明设定5,通过相应地使用不同形状和/或分布的通道开口,也有可能在计量系统2内预定义其他照明设定,例如传统的照明设定(其中实际上所有的照明角度都用于物体照明,特别是除了接近垂直或平均入射到待照明物体上的照明角度)、环形照明设定(其总体上具有小的照明角度,即接近垂直或平均入射的照明角度,其本身可被省略)、或偶极照明设定(其中个别极可分别具有“小叶(leaflet)”轮廓,即大致对应于通过双凸透镜元件的截面的边缘轮廓)。
35.照明系统4与成像光学单元或投射光学单元8一起构成计量系统2的光学测量系统9。
36.在分别设定照明设定5的情况下,照明光1照明计量系统2的物面11的物场10。光刻掩模12(也称作掩模母版)布置为物面11中的反射物体。物面11平行于xy平面延伸。
37.在显示了用于引导成像光1通过计量系统2的投射光学单元8的更具体细节的图3中,物体上待成像的物体结构13(面向投射光学单元8)显示为垂直于图3中的绘图平面延伸的线结构。
38.如图1中示意性所示,照明光1从光刻掩模12反射,并在入射光瞳平面中进入成像光学单元8的入射光瞳。成像光学单元8的使用入射光瞳可具有圆形或椭圆形边界。
39.在成像光学单元8内,照明或成像光1在入射光瞳平面和出射光瞳平面之间传播。
成像光学单元8的圆形出射光瞳位于出射光瞳平面中。
40.成像光学单元8将物场10成像到计量系统2的像面15中的像场14中。在由投射光学单元8进行成像过程中的放大成像比例大于500。取决于投射光学单元8的实施例,放大成像比例可大于100、可大于200、可大于250、可以大于300、可以大于400、且也可显著大于500。投射光学单元8的成像比例通常小于2000。
41.投射光学单元8用于将物体12的一部分成像到像面15中。
42.计量系统2的空间解析检测装置16配置在像面15中。这可包含ccd相机。
43.具有光学测量系统9的计量系统2用于执行一种方法,该方法用以决定由于在euv投射曝光装置(未显示)的光学制造系统的照明和成像条件下进行照明和成像所造成的待测量物体12的空间像。因此,在计量系统2的协助下,可模拟或仿真由制造投射曝光装置的光学制造系统所产生的物体12的空间像。
44.下文在图2和图4的协助下解释此方法的主要步骤。
45.在捕获步骤17中,计量系统2以光学测量系统9的照明和成像条件来捕获待测量物体12的测量空间像i(x,y)。在这种情况下,以预定义的测量照明设定(例如照明设定5)来捕获测量空间像。在此捕获过程中会产生测量空间像的强度数据i(x,y)。
46.决定方法的后续重建步骤18包含通过一重建算法从捕获的测量空间像的数据i(x,y)来重建形式为待测量物体12的转移函数t
mask
(x,y)的物体结构13。在此重建步骤18期间产生所重建的物体结构13的数据。由van den broek等人在phys.rev.lett 109,245502(2012)提出的技术文章“通过动态电子散射的反转获取三维物体电位的方法(method for retrieval of the three-dimensional object potential by inversion of dynamical electron scattering)”中描述了这种来自捕获的测量空间像数据的物体结构重建算法。此重建算法也可应用于光刻掩模。在这种情况下,参考wo 2017/207 297a1。
47.在决定方法的后续模拟步骤19中,在光学制造系统的照明和成像条件下,根据重建的物体结构13的数据t
mask
,模拟制造空间像(即通过制造投射曝光装置的光学制造系统所获得的空间像)的电场ei(x,y)。光学制造系统的该照明和成像条件包含制造照明设定19a(参见图4),其不同于测量照明系统5。
48.以示例方式在图4中显示的制造照明设定19a具有圆形边缘轮廓20。替代地,可使用具有偏离圆形的边缘轮廓(例如具有椭圆形边缘轮廓)的制造照明设定。
49.图4所示的制造照明设定19a为自由形式的照明设定。这种自由形式的照明设定无法用标准化的照明设定“传统”、“环形”、“偶极”或“多极”来描述。自由形式的制造照明设定19a在制造照明光瞳的边缘轮廓20内具有多个被照明的个别区域21。个别区域21以点栅格的选定栅格点的方式布置,该点栅格完全覆盖边缘轮廓内的照明光瞳。
50.每一被照明的个别区域21具有相同的典型直径。个别区域21的典型直径可在总光瞳面积的0.5%和10%之间的范围内。
51.被照明的个别区域21可具有圆形边界。被照明的个别区域21以在照明光瞳上不规则分布的方式布置在边缘轮廓20内。被照明的个别区域21以不同表面密度分布在照明光瞳上的方式布置在边缘轮廓20内。
52.在照明设定19a的情况下,所有被照明的个别区域以相同的照明强度进行照明。在替代的制造照明设定的情况下,照明强度可特别地在照明光瞳的照明区域上在最小照明强
度和最大照明强度之间的范围内连续变化,其中最小照明强度大于0。
53.在另外与制造照明设定19a对应的制造照明设定的情况下,可通过以不同的照明强度照明不同的个别区域21来实现照明强度的这种变化。在此情况下,可使用最大照明强度来照明个别区域21中的某些个别区域,并可使用较低的照明强度(例如最大照明强度的90%、80%、70%、60%、50%、40%、30%、20%、10%、5%、1%)来照明其他的个别区域21。在这种情况下,可使用不同的渐变照明强度来照明不同的个别区域21,或可能是照明强度的连续变化。在使用渐变的照明强度的情况下,可使用两个步骤、三个步骤、四个步骤、五个步骤、六个步骤、七个步骤、八个步骤、九个步骤、十个步骤或者甚至更多个步骤。
54.制造空间像i(x,y)的模拟还受到与制造投射曝光装置的投射光学单元22的成像条件有关的数据的影响。在图4的最左侧示意性地显示了制造投射光学单元22,其通常与计量系统2的测量投射光学单元8有很大不同。替代地,也可使用对应于制造投射光学单元的测量投射光学单元。
55.制造投射光学单元22的像侧数值孔径可在0.3至0.9之间的范围内,例如0.33、0.4、0.45、0.5、0.55、0.6、0.65、0.7。制造投射光学单元22的成像因子可小于1,使得制造投射光学单元22以缩小的方式将物体结构13成像到制造投射曝光装置的像场26中。此缩小可例如为四倍,从而导致成像比例为0.25。范围在0.1至0.5之间的其他成像比例也是可能的。
56.除了制造照明设定19a外,模拟步骤19也受到制造投射曝光装置的光学制造系统的更多照明条件的影响,特别是制造投射曝光装置的照明系统23的装置功能。该装置功能受euv光源的数据以及制造投射曝光装置的照明和投射光学单元的数据所影响。这类数据例如为关于照明的均匀性的数据,即表示待照明的物体场上的实际照明强度与期望的照明强度之间对应程度的度量的数据。这些数据可进一步包含关于光源3的光子噪声的数据。
57.此外,模拟步骤19可另外受到待测量物体的涂层和/或由制造系统在其上成像物体的基板的特定其他特性的影响。相应的光学数据可为吸收层和/或多层的吸收系数。
58.图4阐明了影响制造空间像i的模拟的输入变量。它们包含制造投射光学单元22的转移函数t
pob
、在重建步骤18期间决定的物体结构13的转移函数t
mask
、以及包含制造照明设定19a的制造照明系统23的照明条件e
illu
(u,v)。在这种情况下,u和v是频域中的坐标。模拟由图4中的方框27示意性地显示。
59.此外,决定方法(在图4中由元件符号28示意性地标示)可另外受到系统特定效果的影响,即像差(在系统调整期间和系统校准期间为决定方法做准备的过程中所测量)、均匀性数据以及关于光子噪声的数据(其从测量空间像i(x,y)的数据估算,并选择性地同时包含在计算中)。包含系统特定效果的此步骤绘示于图4中的24处。整体而言,待测量物体12的决定的空间像i=|e
i2
|是根据以下公式在具有制造投射光学单元22的光学投射系统的照明和成像条件下进行的照明和成像产生的:
60.ei(x,y)=ft-1
[t
pob x ft[t
mask
(x',y')x ft-1
[e
illu
(u,v)]]]
[0061]
在此情况下,ft表示傅立叶变换,ft-1
表示反向傅立叶变换。u和v分别表示在频域中的制造照明设定19a和制造投射系统23的光瞳坐标。
[0062]
举例来说,决定方法使得有可能在测量照明设定5(其可使用以相对低的费用生产的设定光阑7来实现)的协助下,以照明设定19a的方式针对明显更为复杂的制造照明设定进行空间像决定(在图4中以元件符号29示意性地标示)。因此,减少了关于计量系统2的设
定光阑7的设计要求。
[0063]
在三个维度上捕获测量空间像i。为此目的,通过图1中示意性显示的物体位移装置12a,将物体12在z方向上逐步移动,使得基于从物面11到像面15的此z位移的像转移,针对在像面15周围的区域中z步距zi产生了多个2d空间像i(x,y,zi)。接着,从多个2d空间像产生3d测量空间像(i(x,y,z))。像面15也称作测量平面。