1.本实用新型涉及一种车辆驾驶辅助系统领域,具体是一种基于抬头显示的电子后视镜。
背景技术:
2.抬头显示又称作平视显示可以将车辆周围的环境信息投影在汽车的前挡风玻璃上,以此来减少驾驶员视线在仪表盘和传统后视镜间不断切换的问题,从而提高驾驶的安全性和驾驶体验。
3.作为车辆后方视野的主要来源,后视镜在保证车辆行驶安全等方面发挥着十分重要的作用,但是,传统的汽车后视镜以及其附属的零部件,由于体积较大,在行驶过程中成为了风阻风噪的来源之一;此外,由于结构特性,传统后视镜的易用性差、曲面成像还会造成成像失真,并且还存在着较大的视觉死角,也使得汽车厂商难以对汽车的造型进行升级。
技术实现要素:
4.本实用新型所要解决的技术问题在于针对现有技术的不足,提供一种能够适用于抬头显示、能够提高驾驶安全性和驾驶体验的基于抬头显示的电子后视镜。
5.本实用新型所要解决的技术问题是通过以下的技术方案来实现的,本实用新型是一种基于抬头显示的电子后视镜,其特点是:包括数据采集系统和投影成像系统,
6.数据采集系统中具有用于完成测距、测角的信号发射和接收装置、用于完成电信号转化的模数转换装置、用于完成电信号计算的微型计算装置和用于存储计算结果的存储装置,信号发射和接收装置与模数转换装置通过讯号线电连接,模数转换装置和微型计算装置通过讯号线电连接,微型计算装置和存储装置通过讯号线电连接;
7.投影成像系统中具有用于将电信号计算结果解码并将距离和角度处理为图像的解码元件和用于将图像投影至挡风玻璃上的投影仪,投影仪和解码元件通过讯号线电连接;
8.所述的存储装置和解码元件通过总线电连接。
9.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所述的信号发射和接收装置共有8个,且信号发射和接收装置为ti公司的awr1642雷达传感器。
10.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所述的模数转换装置为adc模数转换器。
11.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所述的微型计算装置为dsp ti c674x微型计算器。
12.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所述的存储装置为基于arm cortex-r4f的存储器。
13.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所
述的解码元件为stm32解码器。
14.本实用新型所述的基于抬头显示的电子后视镜,其进一步优选的技术方案是:所述的投影仪采用dlp投影仪。
15.与现有技术相比,本实用新型的有益技术效果是:本实用新型设计合理、使用方便,本实用新型中使用雷达传感器既能够减小风阻风噪,又能够使汽车美观得到提升,并且,本实用新型中使用8个雷达传感器能够解决视野死角问题,提高驾驶的安全性;本实用新型结合运用数据采集和投影成像,进一步提高了驾驶的安全性。
附图说明
16.图1是本实用新型的一种设计流程图;
17.图2是数据采集系统的硬件设计图;
18.图3是dlp投影仪的投影原理图;
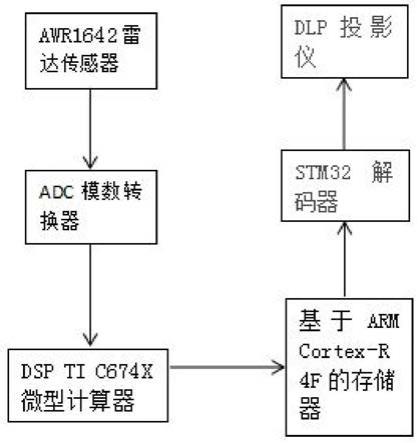
19.图4是本实用新型的工作逻辑图。
具体实施方式
20.以下进一步描述本实用新型的具体技术方案,以便于本领域的技术人员进一步的理解本实用新型,而不构成对其权利的限制。
21.实施例1,参照图1,一种基于抬头显示的电子后视镜,包括包括数据采集系统和投影成像系统,
22.数据采集系统中具有八个用于完成测距、测角的awr1642雷达传感器、用于完成电信号转化的adc模数转换器、用于完成电信号计算的dsp ti c674x微型计算器和用于存储计算结果的基于arm cortex-r4f的存储器,用于完成测速、测距、测角的awr1642雷达传感器与用于完成电信号转化的adc模数转换器通过讯号线电连接,用于完成电信号转化的adc模数转换器和用于完成电信号计算的dsp ti c674x微型计算器通过讯号线电连接,微型计算器和存储器通过讯号线电连接;
23.投影成像系统中具有用于将电信号计算结果解码并将距离和角度处理为图像的stm32解码器和用于将图像投影至挡风玻璃上的dlp投影仪,dlp投影仪和用于将电信号计算结果解码并将距离和角度处理为图像的stm32解码器通过讯号线电连接;
24.所述的存储器4和stm32解码器通过can fd总线7电连接;
25.其中,awr1642雷达传感器具有2个发射通道(tx1和tx2)和4个接收通道(rx1 rx2 rx3和rx4),主要用在盲点检测,变道辅助,停车辅助,路口交通警报,占用检测,简单手势识别和车门开启应用;数据采集系统中用于完成测距、测角的awr1642雷达传感器、用于完成电信号转化的adc模数转换器、用于完成电信号计算的dsp ti c674x微型计算器以及用于存储计算结果的基于arm cortex-r4f的存储器可采取一体化集成设计,其硬件设计图如图2所示,将数据采集系统一体化集成设计,不仅能够降低这些设备的空间占有率,更能够提高这些设备的使用寿命。
26.实施例2,实施例1所述的基于抬头显示的电子后视镜,所述的awr1642雷达传感器的雷达测量范围可根据雷达方程:
[0027][0028]
其中发射功率p
t
=12dbm,积累时间t=12.288ms,天线增益g=16db,,波长λ=0.0039,目标雷达反射截面积σ=0.5m2,常数(4π)3kt0=-171db,噪声系数f0=15db(76~77ghz),检测因子d0=13db,系统损耗l=6db.将参数带入,可得r
max
=100m.说明awr1642平台配合合理的参数选择,能满足最大作用距离的要求。
[0029]
实施例3,实施例1所述的基于抬头显示的电子后视镜,所述的dlp投影仪通过集成了数十万个将dmd数字微镜作为光学成像器件,来调制投影机中的视频信号,驱动dmd光学系统,通过投影透镜来完成数字投影显示的,dmd数字微镜装置是一种一种特殊半导体元件,每一个dmd芯片中含有许许多多的细微的正方形反射镜片,这些镜片中的每一片微镜都代表一个像素,每一个像素面积为16μm
×
16,有两种稳定状态,当位于“开”状态时,镜片向照明方向倾斜,当位于“关”状态时镜片向远离照明方向倾斜。每一个微镜下都有一个由双cmos存储元件形成的存储单元,存储器控制两个状态下的镜片按照行列式的方式排列,从而控制光的反射方向;
[0030]
当光源投射到反射镜片上时,dmd微镜就通过由rgb三色块组成的滤色轮来产生全色彩的投影图像,这个滤色轮以60转/秒的速度在旋转着,这样就能保证光源发射出来的白色光变成rgb三色光循环出现在dmd微镜的芯片表面上;当其中某一种颜色的光投射到dmd微镜芯片的表面后,dmd芯片上的所有微镜,根据自身对应的像素中该颜色的数量,决定了其对这种色光处于开位置的次数,也即决定了反射后通过投影镜头投射到屏幕上的光的数量,当其他颜色的光依次照射到dmd表面时,dmd表面中的所有微镜将极快地重复上面的动作,最终表现出来的结果就是在投影屏幕上出现彩色的投影图像,其投影原理图如图3所示。
[0031]
实施例4,实施例1所述的基于抬头显示的电子后视镜,其工作逻辑图如图4所示,首先初始化系统后,awr1642雷达传感器发出调频脉冲信号,并且接收被物质反射回来的信号,信号经过adc模数转换器完成从脉冲信号到电信号的转化,再经过dsp ti c674x微型计算器的计算得出角度和距离数据,该数据由arm cortex-r4f的存储器储存并经过can fd总线传输至stm32解码器中进行解码后生成图像信息,如果解码失败则再次进行调频脉冲信号的发射,最后dlp投影仪经过判断后再将生成的图像信息投影在挡风玻璃上,完成对驾驶的辅助。