1.本发明涉及一种离轴光学模组,同时涉及包括上述离轴光学模组的头戴式显示设备。
背景技术:
2.增强现实技术的主要特征是将虚拟的信息叠加到现实场景中,以实现对现实的增强。增强现实技术能够把虚拟信息(如物体、图片、视频、声音等等)融合在现实环境中,将现实世界丰富起来,构建一个更加全面、更加美好的世界。随着近年来可穿戴设备逐渐进入人们的事业和生活,特别是智能眼镜行业的发展使人们与增强现实技术之间的距离又进了一步。
3.目前,增强现实技术在头盔图像显示装置上已经取得了长足的发展。其中,有部分产品使用了离轴反射成像技术。在离轴反射成像技术中,通常使用多个彼此互相离轴放置的透镜校正离轴像差。例如,公告号为cn206594387u的实用新型专利中公开的离轴大出瞳距智能ar眼镜,以及公开号为cn107290857a的发明专利申请中公开的头戴式显示设备。然而,现在离轴反射模组中使用的彼此相互离轴放置的多个透镜,一方面增加了与光学模组相配合的结构部分的设计和制造难度,另一方面,部分透镜中仅部分区域透过光线,存在镜片的浪费。
4.此外,现有离轴反射成像技术的光学设计方案中,所使用的曲面反射镜的倾角一般都比较小,一般在30
°
以内,这就造成此种方案在头盔显示系统中,容易存在与其他结构干涉的问题。
技术实现要素:
5.本发明所要解决的首要技术问题在于提供一种离轴光学模组。
6.本发明所要解决的另一技术问题在于提供一种包括上述离轴光学模组的头戴式显示设备。
7.为了实现上述技术目的,本发明采用下述技术方案:
8.一种离轴光学模组,包括:
9.第一透镜组,用于以离轴的方式接受来自微型显示器的图像光;第一透镜组,包括多个透镜,第一透镜组中的多个透镜同轴放置;所述第一透镜组还包括第一楔形棱镜;第一楔形棱镜相对于第一透镜组中的多个透镜,设置在靠近图像源的位置;
10.第二透镜组,用于接受经过第一透镜组的图像光;第二透镜组,包括多个透镜,第二透镜组中的多个透镜同轴放置;
11.第一透镜组和第二透镜组相互离轴设置,第一透镜组和第二透镜组组成一组中继光学系统;
12.曲面镜,经过第一透镜组和第二透镜组的图像光,形成中间像面,然后被曲面镜反射,进入人眼。
13.其中较优地,所述图像源与第一楔形棱镜上表面的夹角控制在15度以内;
14.第一楔形棱镜的两平面夹角在10度以内;
15.第一透镜组z轴和第二透镜组z轴之间的夹角在5度左右。
16.其中较优地,所述第一透镜组中的多个透镜,至少包括一个正-负双胶合透镜,以及一个两表面为非球面的凸透镜。
17.其中较优地,所述第二透镜组还包括第二楔形棱镜;第二楔形棱镜,相对第二透镜组中的多个透镜,设置在靠近曲面镜的位置。
18.其中较优地,第二楔形棱镜的两平面夹角在10度以内。
19.其中较优地,所述第二透镜组中的多个透镜,至少包括一个两表面为非球面的凸透镜,以及一个弯月透镜,弯月透镜弯向曲面镜侧。
20.其中较优地,所述的离轴光学模组,还包括设置在第二透镜组和曲面镜之间的反射镜,用于将透过第二透镜组的图像光反射至曲面镜的表面,反射镜是平面反射镜或曲面反射镜。
21.其中较优地,曲面镜的面型为自由曲面;所述曲面镜的倾角大于30度,小于40度。
22.一种头戴式显示设备,包括上述离轴光学模组。
23.其中较优地,所述第一透镜组和所述第二透镜组设置在曲面镜上方靠近头顶的位置。
24.本发明所提供的离轴光学模组,在不增加微显示器屏幕大小的前提下,通过加入至少一片楔形棱镜和两个离轴设置的透镜组,实现了更大的放大率。上述头戴式显示设备的出瞳距离为75mm,出瞳直径可以达到16mm,视场角可以达到65
°
以上,曲面镜具有更大的倾斜角,倾角可以在30
°
以上,40
°
以内,从而实现与头盔配合使用的大视场角头戴显示。
附图说明
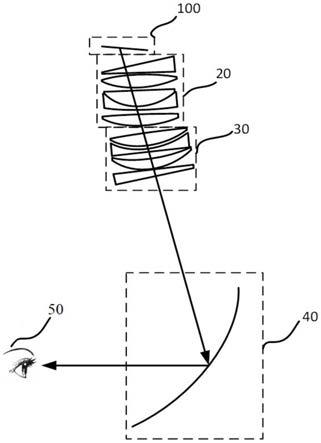
25.图1是本发明所提供的头戴式显示设备的结构示意图;
26.图2是第一实施例所提供的离轴光学模组的结构示意图;
27.图3是图2所示离轴光学模组中,各透镜组中不同光学表面编号的示意图;
28.图4是第二实施例所提供的离轴光学模组的结构示意图;
29.图5是图4所示离轴光学模组中,各透镜组中不同光学表面编号的示意图。
具体实施方式
30.下面结合附图和具体的实施例对本发明的技术方案进行进一步地详细描述。
31.如图1所示,本发明所提供的头戴式显示设备,包括外壳,设置在外壳内部的离轴光学模组。其中,离轴光学模组设置在额头前侧的位置,离轴光学模组中的微显示器设置在曲面镜上方,靠近头顶设置。在下文中,以人眼50为坐标原点,以视轴方向为z向,以垂直于视轴向上的方向为y向,并以垂直于yz平面向纸面里侧的方向为x向,建立三维直角坐标系。
32.在该头戴式显示设备中设置的离轴光学模组,包括从图像源100向人眼50依次排列的第一透镜组20、第二透镜组30和曲面镜40,曲面镜40可以是分光镜,也可以是全反射镜。
33.其中,图像源100可以为lcd、oled、lcos等微型显示器件。优选的,当光学系统中存
在一分光镜时,系统的能量利用率一般不超过60%,因此选择可以大幅度调节显示亮度的lcos或oled显示器件作为图像源。
34.第一透镜组20和第二透镜组30组成一组中继光学系统,通过第一透镜组20和第二透镜组30调节焦距,实现视场角的放大,并校正离轴像差。
35.图像源100、第一透镜组20和第二透镜组30相互离轴设置,第一透镜组20内的各透镜同轴设置,第二透镜组30内的各透镜同轴设置,从而在校正离轴像差的同时,降低了离轴光学模组中各透镜的组装难度。
36.第一透镜组20和/或第二透镜组30中还包括楔形棱镜,用于补偿光线的光程差。或者,在第二透镜组30和曲面镜40之间引入反射镜,使用楔形棱镜和反射镜的结合,补偿光线的光程差。
37.曲面镜40的凹面面向人眼50设置,曲面镜40的单侧表面附着有具有预定透反比的分光膜。分光膜的具体附着工艺不限,例如可以为蒸镀、离子溅射或粘贴等。从图像源100发出的图像光,经过第一透镜组20和第二透镜组30,形成中间像面,然后照射到曲面镜40上,经由曲面镜40反射至人眼50中。可以理解,环境侧的光线也可以经由曲面镜40投射到人眼50中,实现增强现实显示。
38.曲面镜40的表面也可以附着全反射膜。当在曲面镜40的表面附着全反射膜时,可以实现虚拟现实显示效果。
39.下面以增强现实显示为例,结合具体的实施例对设置在外壳中的离轴光学模组进行描述。
40.第一实施例
41.在第一实施例中,离轴光学模组的结构如图2所示,包括,图像源1、第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5、第三透镜6、第四透镜7、第五透镜8、第二楔形棱镜9和曲面镜10。
42.其中,第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5组成第一透镜组20。第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5的机械轴(定义为第一轴a)重合,同轴设置。
43.第一透镜组20可以为一组同轴的球面、柱面、非球面、自由曲面透镜。优选的,为了有效矫正系统色差,第一透镜组20中包含一个正-负双胶合透镜。优选的,为了矫正高级像差,选择一片两表面为非球面的凸透镜。第一透镜组20的焦距为19.5mm左右。
44.相对于第一透镜组20中的其他透镜,第一楔形棱镜2设置在靠近图像源1的位置。第一楔形棱镜2的作用是弥补离轴系统的光程差。优选地,为了便于装调,第一楔形棱镜2与其他透镜接触的表面同轴放置。优选地,为了便于加工,第一楔形棱镜2的表面为平面。第一楔形棱镜的两平面之间的夹角小于10度。
45.第三透镜6、第四透镜7、第五透镜8、第二楔形棱镜9组成第二透镜组30。第三透镜6、第四透镜7、第五透镜8、第二楔形棱镜9的机械轴(定义为第二轴b)重合,同轴设置。
46.第二透镜组30可以为一组同轴的球面、柱面、非球面、自由曲面透镜。优选的,为了矫正高级像差,选择一片凸透镜两表面为非球面;优选的,为了最小化球差,选择一片透镜为弯月透镜,弯向曲面镜10,即,弯月透镜的双侧表面向曲面镜10侧凸出。第二透镜组30的焦距为49.5mm左右。
47.其中,相对于第二透镜组30中的其他透镜,第二楔形棱镜9设置在靠近曲面镜10的位置。第二楔形棱镜9的作用是弥补离轴系统的光程差。优选的,为了便于装调,第二楔形棱镜9与其他透镜接触的表面同轴放置;优选的,为了便于加工,第二楔形棱镜9表面为平面。第二楔形棱镜9的两平面表面之间的夹角小于10度。
48.曲面镜10可以为一个球面、柱面、非球面、自由曲面反射镜。优选的,曲面镜10为一个自由曲面,可以有效矫正系统像差。
49.图像源1发出的图像信号,首先经过第一楔形棱镜2,到达第一透镜3,经过正-负双胶合透镜4,再通过第二透镜5,然后经过第三透镜6,第四透镜7,第五透镜8,第二楔形棱镜9,曲面镜10将图像信号反射,最终图像信号到达人眼。
50.此实施例的各部分位置关系如图2所示。其中,图像源1与第一棱镜2上表面的夹角θ1控制在15
°
以内。两个透镜组之间z轴的夹角θ2(即第一轴a和第二轴b之间的夹角)在5
°
左右。曲面镜10局部坐标原点和第二楔形棱镜9下表面局部坐标原点的连线与第二楔形棱镜9下表面z轴夹角θ3为10
°
左右。定义曲面镜10的法线与视轴的夹角为曲面镜10的倾角θ4,曲面镜10的倾角θ4在36
°
左右。第一楔形棱镜2的两平面夹角a1在10
°
以内,第二楔形棱镜9的两平面夹角a2在10
°
以内。整个光学部分的高度d1为188mm左右。此方案的曲面镜倾角为36
°
,出瞳距离为75mm,出瞳直径为16mm,视场角为67
°
。
51.在上述实施例中,所使用的透镜和棱镜的参数如下。透镜和棱镜中各光学表面的编号可以参见图3。其中,各光学表面的参数如表1所示。在下表中,仅对各光学元件的光学表面的设计参数进行了示例,可以理解,除去各光学表面之外,光学元件还可以包括其他的表面,其他表面不作为光学表面使用。
52.参考下表所给出的数据,该实施例所给出的曲面镜10的面型为自由曲面,其余透镜的各光学表面的面型均为球面或非球面。
53.表1第一实施例中各光学表面参数
54.序号表面类型曲率半径厚度折射率阿贝数偏心50球面无限75
ꢀꢀꢀ
10xy多项式-93.24-103.13
ꢀꢀ
偏心和弯曲192球面无限-3.781.5176.42基本偏心191球面无限-0.87
ꢀꢀ
基本偏心182球面-27.46-4.61.91135.2 181球面-52.8-2.49
ꢀꢀꢀ
172球面-130.60-1.51.73923.0 171球面-33.61-1.16
ꢀꢀꢀ
162非球面-29.69-5.351.56967.9 161非球面364.85-4.88
ꢀꢀꢀ
152非球面-29.42-5.51.59467.3基本偏心151非球面225.51-2.80
ꢀꢀꢀ
143球面-166.17-2.01.91518.4 142球面-27.37-6.151.87137.7 141球面无限-2.0
ꢀꢀꢀ
132球面-47.21-6.01.84839.4 131球面125.81-0.59
ꢀꢀꢀ
122球面无限-6.041.65429.3 121球面无限-3.5
ꢀꢀ
基本偏心1球面无限
ꢀꢀꢀ
基本偏心
55.第二实施例
56.如图4所示的离轴光学模组,包括,图像源1、第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5、第三透镜6、第四透镜7、第五透镜8、反射镜11和曲面镜10。
57.其中,第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5组成第一透镜组20。第一楔形棱镜2、第一透镜3、正-负双胶合透镜4、第二透镜5的机械轴(定义为第一轴a)重合,同轴设置。
58.第一透镜组20可以为一组同轴的球面、柱面、非球面、自由曲面透镜。优选的,为了有效矫正系统色差,第一透镜组20中包含一个正-负双胶合透镜。优选的,为了矫正高级像差,选择一片两表面为非球面的凸透镜。
59.第一楔形棱镜2设置在靠近图像源1的位置。第一楔形棱镜2的作用是弥补离轴系统的光程差。优选地,为了便于装调,第一楔形棱镜2与其他透镜接触的表面同轴放置。优选地,为了便于加工,第一楔形棱镜2的表面为平面。
60.第三透镜6、第四透镜7、第五透镜8组成第二透镜组30。第三透镜6、第四透镜7、第五透镜8的机械轴(定义为第二轴b)重合,同轴设置。
61.第二透镜组30可以为一组同轴的球面、柱面、非球面、自由曲面透镜。优选的,为了矫正高级像差,选择一片两表面为非球面的凸透镜;优选的,为了最小化球差,选择一片透镜为弯月透镜。
62.在该实施例中,在第二透镜组30和曲面镜10之间设置了反射镜11。通过设置反射镜11,可以将图像源1、第一透镜组20、第二透镜组30推到更远离头顶的位置,从而适应头戴式显示设备的结构设计。
63.反射镜11,可以为平面镜、球面镜、非球面镜或者自由曲面镜。优选的,在图示的实施例中采用平面反射镜,可起到改变光路,避免光学系统与头盔其他结构干涉的作用,同时可改变不同视场光路的光程差,达到减少一片棱镜使用的目的。
64.曲面镜10可以为一个球面、柱面、非球面、自由曲面反射镜。优选的,曲面镜10为一个自由曲面,可以有效矫正系统像差。
65.图像源1发出的图像信号,首先经过第一楔形棱镜2,到达第一透镜3,经过正-负双胶合透镜4,再通过第二透镜5,然后经过第三透镜6,第四透镜7,第五透镜8,到达反射镜11,反射镜11将图像信号反射至曲面镜10,曲面镜10反射图像信号,最终图像信号到达人眼。
66.其中,图像源1和第一楔形棱镜2上表面光轴夹角θ1在10
°
以内。两个透镜组之间机械轴的夹角θ2在2
°
左右。第五透镜8局部坐标原点和平面反射镜11局部坐标原点的连线与平面反射镜11的z轴夹角θ3为10
°
左右。平面反射镜11局部坐标原点和曲面镜10局部坐标原点的连线与平面反射镜11的z轴之间的夹角θ5为56
°
左右。曲面镜10的倾角θ4在36
°
左右。第一楔形棱镜2的两平面夹角a1在10
°
以内。整个光学部分的高度d1为188mm左右。
67.在上述实施例中,所使用的透镜和棱镜的参数如下。透镜和棱镜中各光学表面的
编号可以参见图5。其中,各光学表面的参数如表2所示。在下表中,仅对各光学元件的光学表面的设计参数进行了示例,可以理解,除去各光学表面之外,光学元件还可以包括其他的表面,其他表面不作为光学表面使用。
68.参考下表所给出的数据,该实施例所给出的曲面镜10的面型为自由曲面,其余透镜的各光学表面的面型均为球面或非球面。
69.表2第二实施例中各光学表面参数
70.序号表面类型曲率半径厚度折射率阿贝数偏心50球面无限75
ꢀꢀꢀ
10xy多项式-139.21-84.98
ꢀꢀ
偏心和弯曲11球面无限30.58
ꢀꢀ
偏心和弯曲282球面27.8551.91928.5基本偏心281球面51.455.05
ꢀꢀꢀ
272球面575.131.51.89618.8 271球面36.560.27
ꢀꢀꢀ
262非球面29.165.51.70856.0 261非球面486.533.51
ꢀꢀꢀ
252非球面31.495.51.67147.2基本偏心251非球面-128.633.57
ꢀꢀꢀ
243球面86.161.51.84919.7 242球面19.9181.91135.3 241球面-2794.91.61
ꢀꢀꢀ
232球面43.5461.72954.7 231球面-92.020.93
ꢀꢀꢀ
222球面无限41.51764.2 221球面无限3.09
ꢀꢀ
基本偏心1球面无限0.19
ꢀꢀ
基本偏心
71.综上所述,本发明所提供的离轴光学模组及头戴式显示设备,在不增加微显示器屏幕大小的前提下,通过加入至少一片楔形棱镜和两组离轴透镜,实现了更大的放大率,上述头戴式显示设备的出瞳距离为75mm,出瞳直径可以达到16mm,视场角可以达到65
°
以上。并且,在上述光学模组中,曲面镜具有更大的倾斜角,倾角可以在30
°
以上,40
°
以内,实现与头盔配合使用的大视场角头戴显示。此外,上述离轴光学模组中,还可以加入平面反射镜或曲面反射镜,改变光学系统整体结构,发挥弥补部分光程差和矫正像差的作用。采用此种方案,光路的走向可以使得镜片得到充分利用,得到更好的成像质量和更大的视场角。
72.以上对本发明所提供的一种离轴光学模组及头戴式显示设备进行了详细的说明。对本领域的一般技术人员而言,在不背离本发明实质内容的前提下对它所做的任何显而易见的改动,都将构成对本发明专利权的侵犯,将承担相应的法律责任。