1.本实用新型涉及豆腐脑生产加工领域,特别是涉及人工智能豆腐脑机。
背景技术:
2.豆腐脑又称水豆腐,是一道著名的传统特色小吃,是利用大豆蛋白制成的高营养食品,常与豆腐花、豆花混用,依据各地口味不同,北方多爱咸食,而南方则偏爱甜味,豆腐脑的最大特点是豆腐的细嫩以及柔软,故称豆腐中的脑,因此要掌握点卤的技巧,它要求熬浆用微火,不能溢锅(可以放入豆制品专用消泡剂消除泡沫,食用油也可以),使豆腐脑不糊、不苦、不涩,勾卤时用急火,一开锅就行,卤的烹制要用鲜羊肉片和好口磨汤,火候要掌握好,不能用炖肉的技法熬卤,才能保持卤的新鲜。
3.传统豆腐脑的生产加工都需要人工进行操作,不仅需要生产加工人员拥有丰富的经验,同时每道工艺都需要人工进行亲手操作,不仅费时费力,同时还会增强操作人员的疲劳强度,稍有不慎,还会影响豆腐脑的整体品质,从而导致整锅豆腐脑的浪费;
4.因此亟需提供人工智能豆腐脑机来解决上述问题。
技术实现要素:
5.本实用新型所要解决的技术问题传统豆腐脑的生产加工都需要人工进行操作,不仅需要生产加工人员拥有丰富的经验,同时每道工艺都需要人工进行亲手操作,不仅费时费力,同时还会增强操作人员的疲劳强度,稍有不慎,还会影响豆腐脑的整体品质,从而导致整锅豆腐脑的浪费。
6.为解决上述技术问题,本实用新型采用的一个技术方案是:提供人工智能豆腐脑机,包括豆浆加工模块、豆脑全自动成型模块、智能豆腐脑分餐机械手、自动送碗模块以及调料自动加料控制模块;
7.所述豆浆加工模块包括泡豆桶、旋转提升蛟龙、磨浆机、蒸汽发生器以及豆浆桶,所述磨浆机与豆浆桶之间安装有链接管道,所述豆浆桶与蒸汽发生器之间连接有蒸汽管道,所述豆浆桶的中心分别安装有液位传感器和温度传感器,所述豆浆桶一侧底部固定连接有分流管,所述分流管中部分别安装有第一输送泵、第二输送泵、第一流量计、第一电磁阀、第二电磁阀以及第三电磁阀,所述磨浆机中心的顶部设置有水管,所述水管的中部分别安装有第四电磁阀、第二流量计以及变流量微型泵,所述磨浆机的一侧安装有豆渣备料盘;
8.泡豆桶外部增加温控伴热带以及温度传感器,以帮助冬季时能够精准控制黄豆的泡发至饱满,泡豆桶底部增加承重传感器,能够精确计量黄豆的总量,以及控制加水的重量,能够更好的量化黄豆的泡发,泡豆桶底部同时设有电磁阀,在黄豆泡发完成后自动把多余的水分排掉,然后再利用步进电机精准控转旋转提升蛟龙输送已泡发完成的黄豆;
9.旋转提升蛟龙输送的黄豆进入磨浆机,磨浆机启动,水管的第四电磁阀打开,变流量微型泵运行,经第二流量计精准供水,变流量供水能够更好的控制出浆率,以及保证豆浆的浓度,稳定质量,出浆后经链接管道过滤网进入到链接管道内备用,黄豆经磨浆机研磨后
分离出的豆渣储存到豆渣备料盘,当豆浆桶内液位传感器监测到豆浆液位达到一定液位后,豆渣备料盘的豆渣二次加水研磨,二次研磨豆渣的目的为更多的出浆,一次研磨渣桨分离并不彻底,经过二次研磨后能够多出20%豆浆;
10.当液位传感器监测到豆浆桶豆浆液位到一定量程时,启动蒸汽发生器,经蒸汽管道将蒸汽输送给豆浆加热,此时磨浆机持续运行,一直运行到液位传感器监测到豆浆桶内豆浆达到设定的液位停止;
11.此时温度传感器持续监测豆浆的温度变化,当豆浆加热的温度达到设定温度后,关闭蒸汽发生器,等待一定的时间后再打开蒸汽发生器,做间歇性的豆浆加热,间歇性加热可以节省蒸汽能源,防止豆浆沸腾溢出,同时豆浆的持续加热能够去除生豆的腥气;当豆浆加热完成后打开第一电磁阀,使豆浆经第一流量计、第一输送泵、第二电磁阀输送至杯子中,不做豆腐脑成型;豆浆加热完成后打开第一电磁阀,使豆浆经第一流量计、第二输送泵、第三电磁阀输送至豆脑全自动成型模块。
12.所述豆脑全自动成型模块包括承重转盘,所述承重转盘的顶部分别设置有第一保温桶、第二保温桶、第三保温桶、第四保温桶、第五保温桶以及第六保温桶,所述承重转盘顶部分别设置有第一步进电机和第二步进电机,所述承重转盘的顶部设置有出浆管,所述承重转盘顶部一侧设置有投料组合;
13.所述投料组合包括料仓和混料仓,所述料仓的一侧设置有第三步进电机,所述料仓底部中心安装有第一称重传感器,所述料仓的中心设置有与第三步进电机相对应的旋转出料轴,所述混料仓底部中心安装有第五电磁阀,所述混料仓一侧连接管的中心分别设置有第一微型泵以及流量传感器,所述混料仓的底部安装有第六电磁阀,所述混料仓一侧底部安装有超声波液位传感器;
14.豆浆经出浆管储存在第一保温桶、第二保温桶、第三保温桶、第四保温桶、第五保温桶以及第六保温桶中,经承重转盘豆浆加工部分的投料组合准确统计出的数据,料仓经第三步进电机拖动旋转出料轴持续往混料仓投料,一直经称重传感器计量,计量满足时,第三步进电机停止;打开第五电磁阀,经第一微型泵、流量传感器加入定量温水混合,混合完成后,第六电磁阀打开混合料加入到第一保温桶、第二保温桶、第三保温桶、第四保温桶、第五保温桶以及第六保温桶,第一步进电机拖动承重转盘整体旋转移动,第六保温桶移动至第二步进电机位置后,第一步进电机停止,停止后第二步进电机做正反转运动,达到规定的运行时间停止,第二步进电机做正反运动其目的为投入的料液能够不用人工干预的情况下混合均匀。
15.所述智能豆腐脑分餐机械手包括原料桶,所述原料桶的后端设置有支撑臂,所述支撑臂外壁的中心安装有第十步进电机,所述支撑臂的顶部安装有第二齿条滑竿,所述第二齿条滑竿的中心分别安装有第八步进电机和第九步进电机,所述第二齿条滑竿的两端均固定连接有第一齿条滑竿,所述第一齿条滑竿底部一侧安装有第四步进电机,所述第一齿条滑竿的底端安装有第二称重传感器,所述第一齿条滑竿的底部分别安装有第五步进电机、第六步进电机、第一铲勺、椭圆导轨、第二铲勺以及上下滑块、第七步进电机,所述原料桶的底部中心安装有超声波液位计,所述原料桶的底部安装有第十一步进电机;
16.第十步进电机拖动支撑臂旋转度,第四步进电机拖动第一齿条滑竿向下运动,向下运动的数据由超声波液位计来测量数据给定,同时第八步进电机拖动第二齿条滑竿运
动,运动的数据从原料桶中间位置开始,以上运动到位后,第六步进电机旋转拖动第一铲勺垂直向下,第一铲勺为个或多个,第五步进电机旋转拖动第一铲勺的上下滑块在椭圆导轨上运动,到位后,第六步进电机拖动第一铲勺旋转90度,在第六步进电机拖动第一铲勺旋转90度的同时,第十一步进电机旋转拖动原料桶,以上两个动作同步完成,盛取豆腐脑第一步完成;第五步进电机再次旋转拖动第一铲勺的上下滑块在椭圆导轨上运动,到高位后,第七步进电机拖动第二铲勺旋转90度,在低位等待,此时称重传感器计量第一铲勺的豆腐脑总量,重量达到后装碗,如重量不够继续在第六步进电机拖动第一铲勺旋转90度的同时第十一步进电机旋转拖动原料桶,以上两个动作同步完成;盛取豆腐脑,重量达到后,第十步进电机拖动支撑臂旋转度准备装碗;第十步进电机拖动支撑臂旋转180度的同时另一个机械臂可重复以上动作,机械臂可以是一条或者多条,设多条的目的是提高工作效率节约时间。
17.所述自动送碗模块包括蒸汽管、碗托盘、第十五步进电机、传送带、第十三步进电机以及吸气管,所述蒸汽管的底部安装有蒸汽喷头,所述碗托盘的底端安装有第十二步进电机,所述碗托盘的一侧设置有丝杆,所述丝杆的底端固定连接有第十四步进电机,所述丝杆的外壁安装有与碗托盘相对应的传送臂,所述吸气管一端的底部设置有负压吸嘴;
18.蒸汽经蒸汽管、蒸汽喷头给碗高温杀菌消毒,第十二步进电机拖动碗托盘旋转置位,第十四步进电机旋转带动丝杆旋转,从而带动传送臂上升把碗托起到位,负压吸嘴吸住碗底,第十三步进电机做180度旋转,并将负压吸嘴吸住的碗释放到传送带带,第十五步进电机传送碗到位,第十步进电机拖动支撑臂旋转180度准备装碗,第十二步进电机再次旋转拖动第一铲勺的上下滑块在椭圆导轨上运动,到达低位后,第十三步进电机拖动第一铲勺旋转90度,把第一铲勺豆腐脑装碗,完成后,第十二步进电机再次旋转,第十五步进电机拖动第二铲勺旋转90度,把第二铲勺豆腐脑装碗,装碗完成。
19.所述调料自动加料控制模块包括调料盒、蠕动泵以及出料口,传送带拖动装好的豆腐脑到达指定位置准备加调料,调料盒的调料经蠕动泵精准控制,经出料口投放到碗里,豆腐脑装碗完成,调料盒与蠕动泵相对应,为多组组合,蠕动泵为步进电机控制精准投料,以保证成品口味的同一,同时可以调整步进电机的转动控制蠕动泵投放调料的多少来实现口味个性化订制。
20.优选的,所述分流管有多根分管组合而成。
21.优选的,所述第一保温桶、第二保温桶、第三保温桶、第四保温桶、第五保温桶以及第六保温桶均在承重转盘顶部均匀分布。
22.优选的,所述支撑臂包括底固定柱和顶部旋转柱,且顶部旋转柱与底固定柱转动连接。
23.优选的,所述碗托盘的顶部周侧固定连接有多组与盛放碗相对应的限位杆。
24.优选的,所述调料盒和出料口均在传送平台顶部呈对称结构设置。
25.本实用新型的有益效果如下:
26.本实用新型通过设计豆浆加工模块、豆脑全自动成型模块、智能豆腐脑分餐机械手、自动送碗模块以及调料自动加料控制模块,能够实现智能泡豆、磨浆、磨浆水精确输送、豆渣复磨、蒸汽发生器管理、豆浆加热、豆浆转场、豆脑定型料精准投放、自动搅匀混合液、豆腐脑成型、豆脑分餐、豆脑称重、器皿消毒、器皿自动到位、豆脑的装碗以及调味料精准投放,同时也能够实现热豆浆分餐精准计量,全程无需人工干预,从而使其整体的工作效率大
大提高。
附图说明
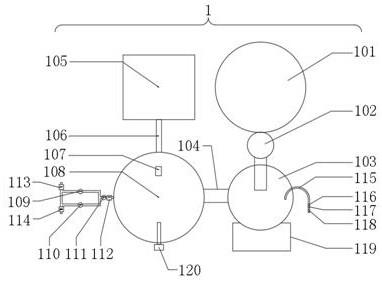
27.图1为本实用新型豆浆加工模块的结构示意图;
28.图2为本实用新型豆脑全自动成型模块的结构示意图;
29.图3为本实用新型投料组合的结构示意图;
30.图4为本实用新型智能豆腐脑分餐机械手的结构示意图;
31.图5为本实用新型自动送碗模块的结构示意图;
32.图6为本实用新型碗托盘的结构示意图;
33.图7为本实用新型调料自动加料控制模块的结构示意图。
34.图中:1、豆浆加工模块;101、泡豆桶;102、旋转提升蛟龙;103、磨浆机;104、链接管道;105、蒸汽发生器;106、蒸汽管道;107、液位传感器;108、豆浆桶;109、第一输送泵;110、第二输送泵;111、第一流量计;112、第一电磁阀;113、第二电磁阀;114、第三电磁阀;115、水管;116、第四电磁阀;117、第二流量计;118、变流量微型泵;119、豆渣备料盘;120、温度传感器;2、豆脑全自动成型模块;201、承重转盘; 202、第一保温桶;203、第二保温桶;204、第一步进电机;205、第二步进电机;206、第三保温桶;207、出浆管;208、第四保温桶;209、第五保温桶;210、第六保温桶;211、投料组合;21101、料仓;21102、第三步进电机;21103、第一称重传感器;21104、旋转出料轴;21105、第五电磁阀;21106、第一微型泵;21107、流量传感器;21108、混料仓;21109、第六电磁阀;21110、超声波液位传感器;3、智能豆腐脑分餐机械手;301、第一齿条滑竿;302、第四步进电机;303、第二称重传感器;304、第五步进电机;305、第六步进电机;306、第一铲勺;307、椭圆导轨;308、第二铲勺;309、上下滑块;310、第七步进电机;311、第二齿条滑竿;312、第八步进电机;313、第九步进电机;314、第十步进电机;315、支撑臂; 316、原料桶;317、超声波液位计;318、第十一步进电机;4、自动送碗模块;401、蒸汽管;402、蒸汽喷头;403、碗托盘;404、第十二步进电机;405、第十三步进电机;406、负压吸嘴;407、传送臂;408、第十四步进电机;409、丝杆;410、第十五步进电机;411、传送带;5、调料自动加料控制模块;501、调料盒;502、蠕动泵;503、出料口。
具体实施方式
35.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
36.请参阅图1-7,人工智能豆腐脑机,包括豆浆加工模块1、豆脑全自动成型模块2、智能豆腐脑分餐机械手3、自动送碗模块4以及调料自动加料控制模块5;
37.如图1所示,豆浆加工模块1包括泡豆桶101、旋转提升蛟龙102、磨浆机103、蒸汽发生器105以及豆浆桶108,磨浆机103与豆浆桶108之间安装有链接管道104,豆浆桶108与蒸汽发生器105之间连接有蒸汽管道 106,豆浆桶108的中心分别安装有液位传感器107和温度传感器120,豆浆桶108一侧底部固定连接有分流管,分流管有多根分管组合而成,分流管中部分别安装有第一输送泵109、第二输送泵110、第一流量计111、第一电磁阀112、第二电磁阀113以及第三电磁阀114,磨浆机103中心的顶部设置有水管115,水管115的中部分别安
装有第四电磁阀116、第二流量计117以及变流量微型泵118,磨浆机103的一侧安装有豆渣备料盘119;
38.泡豆桶101外部增加温控伴热带以及温度监测器,以帮助冬季时能够精准控制黄豆的泡发至饱满,泡豆桶101底部增加承重传感器,能够精确计量黄豆的总量,以及控制加水的重量,能够更好的量化黄豆的泡发,泡豆桶101底部同时设有电磁阀,在黄豆泡发完成后自动把多余的水分排掉,然后再利用步进电机精准控转旋转提升蛟龙102输送已泡发完成的黄豆;
39.旋转提升蛟龙102输送的黄豆进入磨浆机103,磨浆机103启动,水管115的第四电磁阀116打开,变流量微型泵118运行,经第二流量计117 精准供水,变流量供水能够更好的控制出浆率,以及保证豆浆的浓度,稳定质量,出浆后经链接管道104过滤网进入到链接管道104内备用,黄豆经磨浆机103研磨后分离出的豆渣储存到豆渣备料盘119,当豆浆桶108 内液位传感器107监测到豆浆液位达到一定液位后,豆渣备料盘119的豆渣二次加水研磨,二次研磨豆渣的目的为更多的出浆,一次研磨渣桨分离并不彻底,经过二次研磨后能够多出20%豆浆;
40.当液位传感器107监测到豆浆桶108豆浆液位到一定量程时,启动蒸汽发生器105,经蒸汽管道106将蒸汽输送给豆浆加热,此时磨浆机103 持续运行,一直运行到液位传感器107监测到豆浆桶108内豆浆达到设定的液位停止;
41.此时温度传感器120持续监测豆浆的温度变化,当豆浆加热的温度达到设定温度后,关闭蒸汽发生器105,等待一定的时间后再打开蒸汽发生器105,做间歇性的豆浆加热,间歇性加热可以节省蒸汽能源,防止豆浆沸腾溢出,同时豆浆的持续加热能够去除生豆的腥气;当豆浆加热完成后打开第一电磁阀112,使豆浆经第一流量计111、第一输送泵109、第二电磁阀113输送至杯子中,不做豆腐脑成型;豆浆加热完成后打开第一电磁阀112,使豆浆经第一流量计111、第二输送泵110、第三电磁阀114输送至豆脑全自动成型模块2。
42.如图2-3所示,豆脑全自动成型模块2包括承重转盘201,承重转盘 201的顶部分别设置有第一保温桶202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209以及第六保温桶210,第一保温桶202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209以及第六保温桶210均在承重转盘201顶部均匀分布,承重转盘201顶部分别设置有第一步进电机204和第二步进电机205,承重转盘201的顶部设置有出浆管207,承重转盘201顶部一侧设置有投料组合211;
43.投料组合211包括料仓21101和混料仓21108,料仓21101的一侧设置有第三步进电机21102,料仓21101底部中心安装有第一称重传感器 21103,料仓21101的中心设置有与第三步进电机21102相对应的旋转出料轴21104,混料仓21108底部中心安装有第五电磁阀21105,混料仓21108 一侧连接管的中心分别设置有第一微型泵21106以及流量传感器21107,混料仓21108的底部安装有第六电磁阀21109,混料仓21108一侧底部安装有超声波液位传感器21110;
44.豆浆经出浆管207储存在第一保温桶202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209以及第六保温桶210中,经承重转盘201豆浆加工部分的投料组合211准确统计出的数据,料仓21101经第三步进电机21102拖动旋转出料轴21104持续往混料仓21108投料,一直经第一称重传感器21103计量,计量满足时,第三步进电机21102停止;打
开第五电磁阀21105,经第一微型泵21106、流量传感器21107加入定量温水混合,混合完成后,第六电磁阀21109打开混合料加入到第一保温桶 202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209 以及第六保温桶210,第一步进电机204拖动承重转盘201整体旋转移动,第六保温桶210移动至第二步进电机205位置后,第一步进电机204停止,停止后第二步进电机205做正反转运动,达到规定的运行时间停止,第二步进电机205做正反运动其目的为投入的料液能够不用人工干预的情况下混合均匀。
45.如图4所示,智能豆腐脑分餐机械手3包括原料桶316,原料桶316 的后端设置有支撑臂315,支撑臂315包括底固定柱和顶部旋转柱,且顶部旋转柱与底固定柱转动连接,支撑臂315外壁的中心安装有第十步进电机314,支撑臂315的顶部安装有第二齿条滑竿311,第二齿条滑竿311的中心分别安装有第八步进电机312和第九步进电机313,第二齿条滑竿311 的两端均固定连接有第一齿条滑竿301,第一齿条滑竿301底部一侧安装有第四步进电机302,第一齿条滑竿301的底端安装有第二称重传感器303,第一齿条滑竿301的底部分别安装有第五步进电机304、第六步进电机305、第一铲勺306、椭圆导轨307、第二铲勺308以及上下滑块309、第七步进电机310,原料桶316的底部中心安装有超声波液位计317,原料桶316的底部安装有第十一步进电机318;
46.第十步进电机314拖动支撑臂315旋转180度,第四步进电机302拖动第一齿条滑竿301向下运动,向下运动的数据由超声波液位计317来测量数据给定,同时第八步进电机312拖动第二齿条滑竿311运动,运动的数据从原料桶316中间位置开始,以上运动到位后,第六步进电机305旋转拖动第一铲勺306垂直向下,第一铲勺306为1个或多个,第五步进电机304旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到位后,第六步进电机305拖动第一铲勺306旋转90度,在第六步进电机 305拖动第一铲勺306旋转90度的同时,第十一步进电机318旋转拖动原料桶316,以上两个动作同步完成,盛取豆腐脑第一步完成;第五步进电机304再次旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到高位后,第七步进电机310拖动第二铲勺308旋转90度,在低位等待,此时第二称重传感器303计量第一铲勺306的豆腐脑总量,重量达到后装碗,如重量不够继续在第六步进电机305拖动第一铲勺306旋转90度的同时第十一步进电机318旋转拖动原料桶316,以上两个动作同步完成;盛取豆腐脑,重量达到后,第十步进电机314拖动支撑臂315旋转180度准备装碗;第十步进电机314拖动支撑臂315旋转180度的同时另一个机械臂可重复以上动作,机械臂可以是一条或者多条,设多条的目的是提高工作效率节约时间。
47.如图5所示,自动送碗模块4包括蒸汽管401、碗托盘403、第十五步进电机410、传送带411、第十三步进电机405以及吸气管,蒸汽管401的底部安装有蒸汽喷头402,碗托盘403的底端安装有第十二步进电机404,碗托盘403的一侧设置有丝杆409,丝杆409的底端固定连接有第十四步进电机408,丝杆409的外壁安装有与碗托盘403相对应的传送臂407,吸气管一端的底部设置有负压吸嘴406;如图6所示,碗托盘403的顶部周侧固定连接有多组与盛放碗相对应的限位杆;
48.蒸汽经蒸汽管401、蒸汽喷头402给碗高温杀菌消毒,第十二步进电机404拖动碗托盘403旋转置位,第十四步进电机408旋转带动丝杆409 旋转,从而带动传送臂407上升把碗托起到位,负压吸嘴406吸住碗底,第十三步进电机405做180度旋转,并将负压吸嘴406吸住的碗释放到传送带411带,第十五步进电机410传送碗到位,第十步进电机314拖动支撑臂
315旋转180度准备装碗,第十二步进电机404再次旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到达低位后,第十三步进电机405拖动第一铲勺306旋转90度,把第一铲勺306豆腐脑装碗,完成后,第十二步进电机404再次旋转,第十五步进电机410拖动第二铲勺308 旋转90度,把第二铲勺308豆腐脑装碗,装碗完成。
49.如图7所示,调料自动加料控制模块5包括调料盒501、蠕动泵502 以及出料口503,调料盒501和出料口503均在传送平台顶部呈对称结构设置,传送带411拖动装好的豆腐脑到达指定位置准备加调料,调料盒501 的调料经蠕动泵502精准控制,经出料口503投放到碗里,豆腐脑装碗完成,调料盒501与蠕动泵502相对应,为多组组合,蠕动泵502为步进电机控制精准投料,以保证成品口味的同一,同时可以调整步进电机的转动控制蠕动泵502投放调料的多少来实现口味个性化订制。
50.本实用新型在使用时,将黄豆导入泡豆桶101中,泡豆桶101底部增加承重传感器,能够精确计量黄豆的总量,以及控制加水的重量,能够更好的量化黄豆的泡发,泡豆桶101底部同时设有电磁阀,在黄豆泡发完成后自动把多余的水分排掉,旋转提升蛟龙102输送的黄豆进入磨浆机103,磨浆机103启动,水管115的第四电磁阀116打开,变流量微型泵118运行,经第二流量计117精准供水,出浆后经链接管道104过滤网进入到链接管道104内备用,黄豆经磨浆机103研磨后分离出的豆渣储存到豆渣备料盘119,当豆浆桶108内液位传感器107监测到豆浆液位达到一定液位后,豆渣备料盘119的豆渣二次加水研磨,当液位传感器107监测到豆浆桶108豆浆液位到一定量程时,启动蒸汽发生器105,经蒸汽管道106将蒸汽输送给豆浆加热,此时磨浆机103持续运行,一直运行到液位传感器 107监测到豆浆桶108内豆浆达到设定的液位停止;此时温度传感器120 持续监测豆浆的温度变化,当豆浆加热完成后打开第一电磁阀112,使豆浆经第一流量计111、第二输送泵110、第三电磁阀114输送至豆脑全自动成型模块2;豆浆经出浆管207储存在第一保温桶202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209以及第六保温桶210中,经承重转盘201豆浆加工部分的投料组合211准确统计出的数据,料仓 21101经第三步进电机21102拖动旋转出料轴21104持续往混料仓21108 投料,一直经第一称重传感器21103计量,计量满足时,第三步进电机21102 停止;打开第五电磁阀21105,经第一微型泵21106、流量传感器21107加入定量温水混合,混合完成后,第六电磁阀21109打开混合料加入到第一保温桶202、第二保温桶203、第三保温桶206、第四保温桶208、第五保温桶209以及第六保温桶210,第一步进电机204拖动承重转盘201整体旋转移动,第六保温桶210移动至第二步进电机205位置后,第一步进电机204停止,停止后第二步进电机205做正反转运动,达到规定的运行时间停止;第十步进电机314拖动支撑臂315旋转180度,第四步进电机302 拖动第一齿条滑竿301向下运动,向下运动的数据由超声波液位计317来测量数据给定,同时第八步进电机312拖动第二齿条滑竿311运动,运动的数据从原料桶316中间位置开始,以上运动到位后,第六步进电机305 旋转拖动第一铲勺306垂直向下,第一铲勺306为1个或多个,第五步进电机304旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到位后,第六步进电机305拖动第一铲勺306旋转90度,在第六步进电机305拖动第一铲勺306旋转90度的同时,第十一步进电机318旋转拖动原料桶316,以上两个动作同步完成,盛取豆腐脑第一步完成;第五步进电机304再次旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到高位后,第七步进电机310拖动第二铲勺308旋转90度,在低位等待,此时第二称重传感器303计量第一铲勺
306的豆腐脑总量,重量达到后装碗,如重量不够继续在第六步进电机305拖动第一铲勺306旋转90度的同时第十一步进电机318旋转拖动原料桶316,以上两个动作同步完成;盛取豆腐脑,重量达到后,第十步进电机314拖动支撑臂315旋转180度准备装碗;第十步进电机314拖动支撑臂315旋转180度的同时另一个机械臂可重复以上动作;蒸汽经蒸汽管401、蒸汽喷头402给碗高温杀菌消毒,第十二步进电机404拖动碗托盘403旋转置位,第十四步进电机408旋转带动丝杆409旋转,从而带动传送臂407上升把碗托起到位,负压吸嘴406 吸住碗底,第十三步进电机405做180度旋转,并将负压吸嘴406吸住的碗释放到传送带411带,第十五步进电机410传送碗到位,第十步进电机 314拖动支撑臂315旋转180度准备装碗,第十二步进电机404再次旋转拖动第一铲勺306的上下滑块309在椭圆导轨307上运动,到达低位后,第十三步进电机405拖动第一铲勺306旋转90度,把第一铲勺306豆腐脑装碗,完成后,第十二步进电机404再次旋转,第十五步进电机410拖动第二铲勺308旋转90度,把第二铲勺308豆腐脑装碗,装碗完成;传送带 411拖动装好的豆腐脑到达指定位置准备加调料,调料盒501的调料经蠕动泵502精准控制,经出料口503投放到碗里,豆腐脑装碗完成,调料盒 501与蠕动泵502相对应,为多组组合,蠕动泵502为步进电机控制精准投料,以保证成品口味的同一,同时可以调整步进电机的转动控制蠕动泵 502投放调料的多少来实现口味个性化订制。
51.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。