1.本发明涉及于拱桥拱肋的脚手架技术领域,具体是一种用于拱桥拱肋的自行爬升脚手架装置。
背景技术:
2.拱桥即圆拱形的桥体,其所组成的支撑配件肋体也为拱形,一般在进行拱桥的建造或者检修时,需要沿着拱桥拱肋移动,主要依靠可进行爬升的脚手架移动,而工人站在脚手架配设的吊篮里,但是一般在将脚手架设备安装于拱桥拱肋上时,需要人工调节固定对接于脚手架上的滑轮位置,安装效率低下,由于拱肋外壁为弧面,一旦滑轮支撑点偏移拱肋中心点正上方,则无法确保滑轮对接后的移动平稳性。
技术实现要素:
3.本发明的目的在于提供一种用于拱桥拱肋的自行爬升脚手架装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.用于拱桥拱肋的自行爬升脚手架装置,包括:连接横板、吊篮和牵引机构。牵引机构与连接横板配合连接。用于拱桥拱肋的自行爬升脚手架装置还包括:滑动对接机构。滑动对接机构包括:主电动伸缩杆、联动杆、第一条形通口、吊杆、限位夹片、定位顶板、滑轮、副电动伸缩杆和辅助侧夹机构。主电动伸缩杆连接至连接横板。第一条形通口水平开设于连接横板上。吊杆穿过第一条形通口。限位夹片连接至吊杆上。联动杆一端活动连接至吊杆。同时联动杆的另一端活动连接至吊杆处。吊篮转动连接至吊杆上。定位顶板连接至吊杆。定位顶板的中心位置嵌合安装有压力感应开关。副电动伸缩杆固定连接至吊杆。滑轮安装于副电动伸缩杆。压力感应开关与副电动伸缩杆电连接。辅助侧夹机构安装于吊杆处。
6.作为本发明进一步的方案:牵引机构包括:牵引绳和电动卷绕机。牵引绳的一端连接至连接横板上,另一端连接至电动卷绕机上。
7.作为本发明进一步的方案:用于拱桥拱肋的自行爬升脚手架装置还包括:加固斜杆。加固斜杆倾斜固定连接至吊杆上,并且加固斜杆抵触在连接横板上。
8.作为本发明进一步的方案:用于拱桥拱肋的自行爬升脚手架装置还包括:滑动对接机构。滑动对接机构包括:滚轮和连接滑槽。滚轮固定安装于加固斜杆。连接滑槽水平开设于连接横板,并且滚轮抵触在连接滑槽内。
9.作为本发明进一步的方案:加固斜杆为钢杆。
10.作为本发明进一步的方案:辅助侧夹机构包括:条形板、第二条形通口、条形滑槽、第一连接弹簧、限位电动伸缩杆、下压板、伸缩连接杆、第二连接弹簧和侧夹板。条形板水平固定连接至吊杆。第二条形通口水平开设于条形板上。条形滑槽水平开设于第二条形通口内。侧夹板设置于条形板处,并且侧夹板穿过第二条形通口,同时侧夹板滑动连接至条形滑槽。第一连接弹簧连接至侧夹板和条形滑槽之间。限位电动伸缩杆水平固定连接至条形板
上。压力感应开关与限位电动伸缩杆电连接。下压板水平设置于条形板。下压板与副电动伸缩杆通过伸缩连接杆连接。第二连接弹簧套接至伸缩连接杆上。
11.作为本发明进一步的方案:下压板的下端面设置有用于卡住侧夹板的波浪卡槽。
12.作为本发明进一步的方案:侧夹板的端面上均匀分布有用于滑动的滚珠。
13.作为本发明进一步的方案:用于拱桥拱肋的自行爬升脚手架装置还包括:固定机构。固定机构包括:站板、重力感应开关、驱动电机和转动顶板。站板固定安装于吊篮内。重力感应开关安装于站板上。驱动电机固定安装于吊篮。转动顶板固定连接至驱动电机的主轴端。重力感应开关与驱动电机电连接。
14.作为本发明进一步的方案:用于拱桥拱肋的自行爬升脚手架装置还包括:凸齿体。凸齿体连接至转动顶板。
15.与现有技术相比,本发明的有益效果是:方便与拱桥拱肋自动对接,保证滑动连接的平稳性,加快安装效率。
16.主要依靠定位顶板中心位置的压力感应开关接触拱桥拱肋单边正上方凸起位置接触而使得滑轮支撑在拱桥拱肋的正上方。并且在滑轮下降对接时,联动侧夹板从侧面将拱桥拱肋固定夹住,保证对接的平稳性。同时提高设备安装效率。
17.两侧安装的吊篮则在检修作业过程中依靠转动顶板保持位置固定,避免晃动影响安全性。而在整个装置依靠牵引机构沿拱桥拱肋移动时,吊篮由于转动连接吊杆,故依靠重力保持在竖直位置,方便工人正常站在内侧。
18.本发明的其他特点和优点将会在下面的具体实施方式、附图中详细的揭露。
附图说明
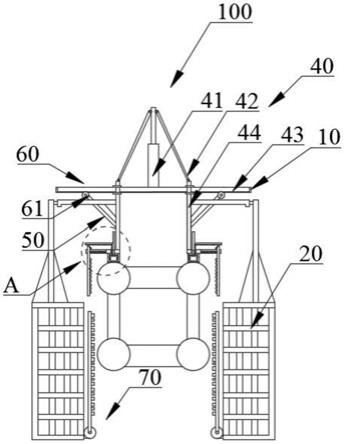
19.图1为本发明的用于拱桥拱肋的自行爬升脚手架装置的结构示意图。
20.图2为图1中本发明的用于拱桥拱肋的自行爬升脚手架装置的吊杆与连接横板配合连接的右视剖面结构图。
21.图3为图1中a处的放大结构图。
22.图4为图3中本发明的用于拱桥拱肋的自行爬升脚手架装置的侧夹板、限位电动伸缩杆和条形板配合连接的俯视结构图。
23.图5为图1中本发明的用于拱桥拱肋的自行爬升脚手架装置的吊篮、站板和重力感应开关配合连接的结构图。
24.图6为图1中本发明的用于拱桥拱肋的自行爬升脚手架装置的转动顶板和驱动电机配合连接的结构图。
25.图7为图1中本发明的用于拱桥拱肋的自行爬升脚手架装置的连接横板与牵引机构配合连接的俯视结构图。
26.附图标号清单:用于拱桥拱肋的自行爬升脚手架装置100;拱桥拱肋200;连接横板10、吊篮20;牵引机构30;牵引绳31;电动卷绕机32;滑动对接机构40:主电动伸缩杆41、联动杆42、第一条形通口43、吊杆44、限位夹片45、定位顶板46、滑轮47、副电动伸缩杆48;辅助侧夹机构49;条形板491、第二条形通口492、条形滑槽493、第一连接弹簧494、限位电动伸缩杆495、下压板496、伸缩连接杆497、第二连接弹簧498;侧夹板499;加固斜杆50;滑动对接机构60;滚轮61;连接滑槽62;固定机构70;站板71、重力感应开关72、驱动电机73;转动顶板74;
凸齿体75。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1至图7所示,本发明实施例中,用于拱桥拱肋的自行爬升脚手架装置100,包括:连接横板10、吊篮20和牵引机构30。牵引机构30与连接横板10配合连接,此处连接横板10用于架放在拱桥拱肋200上,而牵引机构30用于安装在拱桥拱肋200的拱顶位置,然后依靠牵引机构30的牵引使得连接横板10沿着拱桥拱肋200移动。用于拱桥拱肋的自行爬升脚手架装置100还包括:滑动对接机构40。滑动对接机构40包括:主电动伸缩杆41、联动杆42、第一条形通口43、吊杆44、限位夹片45、定位顶板46、滑轮47、副电动伸缩杆48和辅助侧夹机构49。主电动伸缩杆41竖直固定连接至连接横板10上端面中间位置,并且主电动伸缩杆41的上端为伸缩端,即在竖直方向上进行伸缩,并且主电动伸缩杆41配设有遥控开关,方便遥控进行伸缩运动。第一条形通口43水平开设于连接横板10上,并且第一条形通口43分为左右两端,中间部分为实心体,方便固定安装主电动伸缩杆41。吊杆44左右成对竖直穿过第一条形通口43,吊杆44方便在第一条形通口43内进行横向滑动。限位夹片45上下成对固定连接至吊杆44上,并且限位夹片45上下分布于连接横板10的上下端面处,限位夹片45避免吊杆44发生上下运动,保证吊杆44连接于连接横板10上。联动杆42左右成对通过铰链活动连接至吊杆44的上端。同时联动杆42的末端通过铰链活动连接至吊杆44的上端头处。主电动伸缩杆41进行伸缩运动时,致使左右两侧的联动杆42进行张合运动。此过程联动杆42便推拉吊杆44沿着第一条形通口43横向滑动,实现左右两侧吊杆44之间的间距调节功能。吊篮20通过水平转轴转动连接至吊杆44上,由于吊篮20转动连接在吊杆44上,在重力作用下,如此连接横板10带动吊杆44沿不同弧度的拱桥拱肋200移动时,吊篮20均可保持在竖直位置,方便工作人员在其内部进行作业。定位顶板46水平固定连接至吊杆44的下侧。定位顶板46的下端面中心位置嵌合安装有压力感应开关461。副电动伸缩杆48竖直固定连接至吊杆44的下侧。滑轮47安装于副电动伸缩杆48的下端,并且副电动伸缩杆48的下端为伸缩端,方便带动滑轮47进行升降。压力感应开关461与副电动伸缩杆48的伸长控制电路电连接,即压力感应开关461受到挤压时,产生感应,使得副电动伸缩杆48向下伸长运动。同时滑轮47初始位置处于定位顶板46的正前方上侧,即滑轮47位置高于定位顶板46。辅助侧夹机构49安装于吊杆44的斜下侧。
29.当连接横板10需要滑动连接至拱桥拱肋200上时,将连接横板10及其连接组件通过起吊机构吊至拱桥拱肋200的较低位置上方。然后根据拱桥拱肋200的宽度,控制主电动伸缩杆41进行伸缩运动。伸缩的主电动伸缩杆41便通过联动杆42带动左右成对的吊杆44横移调节间距,从而实现左右两侧的滑轮47进行间距调节。并且使得定位顶板46接触在拱桥拱肋200的上侧壁处,由于拱桥拱肋200单根侧边的截面为圆形,其正上方最高点向上凸起,故处于水平位置的定位顶板46在下降接触拱桥拱肋200时,仅与拱桥拱肋200上侧端面最高点接触。在接触时,使得定位顶板46下端面中心位置的压力感应开关461挤压到拱桥拱肋
200上,此时便可确定滑轮47处于拱桥拱肋200的侧边正上方。而压力感应开关461在受到挤压后便使得副电动伸缩杆48进行伸长。致使下侧的滑轮47抵触对接在拱桥拱肋200的端面拱起位置,同时在副电动伸缩杆48进行伸长时,辅助侧夹机构49联动,从侧面夹住拱桥拱肋200,实现连接横板10和吊篮20平稳对接在拱桥拱肋200上。
30.牵引机构30包括:牵引绳31和电动卷绕机32。牵引绳31的一端连接至连接横板10上,另一端连接至电动卷绕机32上。通过电动卷绕机32卷绕牵引绳31,拉动连接横板10沿拱桥拱肋200移动。
31.用于拱桥拱肋的自行爬升脚手架装置100还包括:加固斜杆50。加固斜杆50倾斜固定连接至吊杆44上,并且加固斜杆50的末端抵触在连接横板10的下侧。加固斜杆50用于保证吊杆44在竖直位置上的稳固性。
32.用于拱桥拱肋的自行爬升脚手架装置100还包括:滑动对接机构60。滑动对接机构60包括:滚轮61和连接滑槽62。滚轮61固定安装于加固斜杆50的上端。连接滑槽62水平开设于连接横板10的下侧,并且滚轮61抵触在连接滑槽62内。滚轮61和连接滑槽62的配合连接方便加固斜杆50随吊杆44横移。
33.加固斜杆50为钢杆。
34.辅助侧夹机构49包括:条形板491、第二条形通口492、条形滑槽493、第一连接弹簧494、限位电动伸缩杆495、下压板496、伸缩连接杆497、第二连接弹簧498和侧夹板499。条形板491水平固定连接至吊杆44的下端。第二条形通口492水平开设于条形板491上。条形滑槽493水平开设于第二条形通口492内壁上。侧夹板499竖直设置于条形板491的上侧,并且侧夹板499的上端穿过第二条形通口492,并且侧夹板499的上端滑动连接至条形滑槽493。第一连接弹簧494连接至侧夹板499和条形滑槽493之间。并且图示第一连接弹簧494处于拉伸状态。限位电动伸缩杆495水平固定连接至条形板491上,并且限位电动伸缩杆495的伸缩端处于侧夹板499靠近吊杆44的一侧。压力感应开关461与限位电动伸缩杆495的收缩控制电路电连接。下压板496水平设置于条形板491的上侧。下压板496与副电动伸缩杆48的伸缩端通过伸缩连接杆497连接。第二连接弹簧498套接至伸缩连接杆497上,并且第二连接弹簧498的两端分别固定连接至伸缩连接杆497的伸缩端和固定端。当压力感应开关461产生感应而使得副电动伸缩杆48向下伸长时,压力感应开关461同步使得限位电动伸缩杆495进行收缩脱离侧夹板499。侧夹板499便在第一连接弹簧494的回弹力作用下快速沿条形滑槽493滑动靠近吊杆44,最终侧夹板499贴合到拱桥拱肋200的侧壁上。同时由于副电动伸缩杆48向下伸长,致使下压板496下降压到侧夹板499上,使得侧夹板499保持贴合在拱桥拱肋200上。并且由于伸缩连接杆497的存在,在下压板496压在侧夹板499上时,副电动伸缩杆48正常进行伸缩,无阻碍。
35.下压板496的下端面设置有用于卡住侧夹板499的波浪卡槽4961。
36.侧夹板499的端面上均匀分布有用于滑动的滚珠。方便侧夹板499在夹住拱桥拱肋200后进行滑动。
37.用于拱桥拱肋的自行爬升脚手架装置100还包括:固定机构70。固定机构70包括:站板71、重力感应开关72、驱动电机73和转动顶板74。站板71水平固定安装于吊篮20的内部。重力感应开关72安装于站板71上。驱动电机73固定安装于吊篮20的底部外侧。转动顶板74固定连接至驱动电机73的主轴端。重力感应开关72与驱动电机73电连接,并且驱动电机
73配设有复位开关。当使用者处于吊篮20内,并且需要对拱桥拱肋200对应位置进行检修时,则站在站板71上。然后重力感应开关72便产生感应而使得驱动电机73启动。驱动电机73便使得转动顶板74旋转抵触到拱桥拱肋200上,使得吊篮20相对拱桥拱肋200保持稳固,从而便于工作人员进行检修工作,避免检修过程中吊篮20发生晃动。
38.用于拱桥拱肋的自行爬升脚手架装置100还包括:凸齿体75。凸齿体75连接至转动顶板74靠近拱桥拱肋200的端面上,凸齿体75方便转动顶板74稳固抵触在拱桥拱肋200上。
39.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
40.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。