1.本实用新型涉及一种水平关节机器人 。
背景技术:
2.关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。
技术实现要素:
3.本实用新型的目的在于提供一种多角度旋转,升降且便于外部设备供电的一种水平关节机器人。
4.本实用新型的目的是这样实现的:
5.一种水平关节机器人,包括固定座、第一旋转装置、第一关节臂、底座、升降装置、第二旋转装置、第二关节臂、第三旋转装置、连接端头和用于给外部设备供电的供电插座,所述固定座开有安装区域,所述第一旋转装置设置在安装区域内,所述第一关节臂一端伸入安装区域内连接第一旋转装置,第一旋转装置带动第一关节臂旋转;
6.所述升降装置包括丝杆、螺母和升降电机,所述丝杆以转动方式设置在底座内,所述升降电机置于底座内,升降电机和丝杆连接并带动丝杆旋转,所述第一关节臂另一端设置有螺母,所述螺母套置在丝杆上,所述升降电机带动丝杆旋转,丝杆沿螺母升降,底座跟随丝杆升降;
7.所述第二旋转装置设置在底座上,所述第二关节臂一端连接第二旋转装置,第二旋转装置带动第二关节臂旋转,所述连接端头以转动方式设置在第二关节臂上,所述第三旋转装置和连接端头连接,第三旋转装置带动连接端头旋转,所述供电插座设置在第二关节臂上。
8.用户通过启动第一旋转装置即可调节第一关节臂的旋转角度,用户通过启动升降装置即可控制底座的升降位置,从而调节第二关节臂的高度,用户通过启动第二旋转装置即可调节第二关节臂的旋转角度,而且用户将外部设备和连接端头连接,用户通过启动第三旋转装置即可调节外部设备的旋转角度,从而实现多角度、多高度位置调节外部设备的位置,满足不同的生产需求,而且外部设备的电源线直接插接在第二关节臂上供电插座内,即可完成供电,距离短,而且无需额外引线连接外部电源,使用方便,便于外部设备工作。
9.本实用新型的目的还可以采用以下技术措施解决:
10.进一步地,所述第一旋转装置包括第一旋转电机、减速组件和转盘,所述转盘内置有减速组件安装区域,所述减速组件限制在减速组件安装区域内,所述第一旋转电机置于第一关节臂内,第一旋转电机的转轴伸出第一关节臂外连接减速组件,所述固定座固定在地面/机床上,所述固定座对应安装区域位置开有转盘腔,所述转盘以转动方式设置在转盘腔内,所述第一旋转电机带动减速组件减速旋转,转盘跟随减速组件减速旋转,第一关节臂
跟随转盘旋转。
11.进一步地,所述减速组件包括三个减速齿轮,所述减速齿轮置于减速组件安装区域,所述第一旋转电机的转轴分别与减速齿轮啮合。
12.进一步地,所述升降装置还包括第一主动轮、第一从动轮和第一皮带,所述第一主动轮固定在升降电机的转轴上,所述第一从动轮固定在丝杆上,所述第一皮带套置在第一主动轮和第一从动轮上,升降电机通过第一皮带带动丝杆旋转。
13.进一步地,所述第二旋转装置包括第二旋转电机、齿轮和旋转体,所述第二旋转电机置于底座上,所述齿轮固定在第二旋转电机的转轴上,所述旋转体以转动方式设置在底座上,旋转体外壁设置有齿牙,齿牙和齿轮啮合,第二旋转电机带动旋转体旋转,所述第二关节臂和旋转体连接,第二关节臂跟随旋转体旋转。
14.进一步地,所述第三旋转装置包括第三旋转电机、第二主动轮、第二从动轮和第二皮带,所述第三旋转电机设置在第二关节臂上,所述第二主动轮固定在第三旋转电机的转轴上,所述第二从动轮固定在连接端头上,所述第二皮带套置在第二主动轮和第二从动轮上,第三旋转电机通过第二皮带带动连接端头旋转。
15.进一步地,所述第二关节臂设置有安装座,所述供电插座设置在安装座上。所述供电插座直接设置在第二关节臂上,便于外部设备连接,提高水平关节机器人的实用性。
16.进一步地,所述安装座还设置有数据传输插座。所述数据传输插座直接设置在第二关节臂上,便于外部设备连接,提高水平关节机器人的实用性。
17.进一步地,所述外部设备为夹爪或喷头,夹爪或喷头以可拆方式设置在连接端头上。
18.本实用新型的有益效果如下:
19.本实用新型,用户通过启动第一旋转装置即可调节第一关节臂的旋转角度,用户通过启动升降装置即可控制底座的升降位置,从而调节第二关节臂的高度,用户通过启动第二旋转装置即可调节第二关节臂的旋转角度,而且用户将外部设备和连接端头连接,用户通过启动第三旋转装置即可调节外部设备的旋转角度,从而实现多角度、多高度位置调节外部设备的位置,满足不同的生产需求,而且外部设备的电源线直接插接在第二关节臂上供电插座内,即可完成供电,距离短,而且无需额外引线连接外部电源,使用方便,便于外部设备工作。
20.本实用新型,所述供电插座直接设置在第二关节臂上,便于外部设备连接,提高水平关节机器人的实用性。
21.本实用新型,所述数据传输插座直接设置在第二关节臂上,便于外部设备连接,提高水平关节机器人的实用性。
附图说明
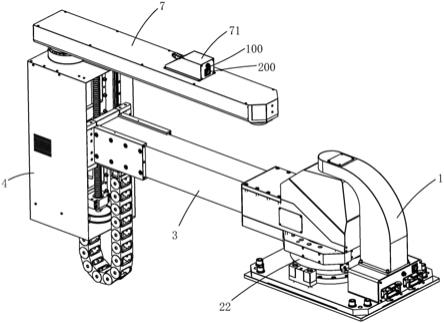
22.图1为水平关节机器人的示意图。
23.图2为水平关节机器人的底座上升示意图。
24.图3为水平关节机器人的第二关节臂旋转示意图。
25.图4为水平关节机器人的第一关节臂旋转示意图。
26.图5为水平关节机器人的底座和固定座装配示意图。
27.图6为水平关节机器人的剖面示意图。
具体实施方式
28.下面结合附图及实施例对本实用新型作进一步描述:
29.实施例,结合图1到图6所示,一种水平关节机器人,包括固定座1、第一旋转装置2、第一关节臂3、底座4、升降装置5、第二旋转装置6、第二关节臂7、第三旋转装置8、连接端头9和用于给外部设备供电的供电插座100和数据传输插座200。
30.所述固定座1固定在地面上,固定座1开有安装区域11,固定座1对应安装区域11的位置开有转盘腔12,所述转盘以转动方式设置在转盘腔12内。
31.所述第一旋转装置2包括第一旋转电机21、减速组件和转盘22,所述转盘22内置有减速组件安装区域221,所述减速组件包括三个减速齿轮23,三个减速齿轮23以转动方式限制于减速组件安装区域221内。
32.所述第一旋转电机21设置在第一关节臂3内,第一旋转电机21的转轴伸出第一关节臂3外并伸入转盘22内,第一旋转电机21的转轴分别与减速齿轮23啮合。
33.所述第一旋转电机21工作时,第一旋转电机21通过减速齿轮23进行减速并带动转盘22减速旋转,转盘22可以进行360度旋转,第一关节臂3跟随转盘22进行360度旋转。
34.所述升降装置5包括丝杆51、螺母52、升降电机53、第一主动轮54、第一从动轮55和第一皮带56,所述升降电机53置于底座4内,所述第一主动轮54固定在升降电机53的转轴上,所述丝杆51以转动方式设置在底座4内,第一从动轮55固定在丝杆51上。
35.所述第一关节臂3的另一端设置有螺母52,所述螺母52套置在丝杆51上,所述第一皮带56套置在第一主动轮54和第一从动轮55上,升降电机53通过第一皮带56带动丝杆51旋转,导致丝杆51沿螺母52升降,所述底座4跟随丝杆51升降。
36.所述第二旋转装置6包括第二旋转电机61、齿轮62和旋转体63,所述第二旋转电机61置于底座4上,所述齿轮62固定在第二旋转电机61的转轴上,所述旋转体63以转动方式设置在底座4上,旋转体63外壁设置有齿牙,齿牙和齿轮62啮合。
37.所述第二关节臂7一端连接旋转体63,所述连接端头9以转动方式设置在第二关节臂7上,所述第二旋转电机61带动旋转体63进行360度旋转,第二关节臂7跟随旋转体63进行360度旋转。
38.所述第三旋转装置8包括第三旋转电机81、第二主动轮82、第二从动轮83和第二皮带84,所述第三旋转电机81设置在第二关节臂7上,所述第二主动轮82固定在第三旋转电机81的转轴上,所述第二从动轮83固定在连接端头9上,所述第二皮带84套置在第二主动轮82和第二从动轮83上,第三旋转电机81通过第二皮带84带动连接端头9进行360度旋转。
39.所述第二关节臂7设置有安装座71,所述供电插座100和数据传输插座200设置在安装座71上。
40.所述外部设备为夹爪(图纸未出示),夹爪以可拆方式设置在连接端头9上,夹爪的供电线连接供电插座100,夹爪的数据线连接数据传输插座200。
41.工作原理:
42.控制第一关节臂3旋转:
43.用户启动第一旋转电机21,第一旋转电机21工作时,第一旋转电机21通过减速齿
轮6223进行减速并带动转盘22减速旋转,转盘22可以进行360度旋转,第一关节臂3跟随转盘22进行360度旋转。
44.控制底座4升降:
45.用户启动升降电机53,升降电机53通过第一皮带56带动丝杆51旋转,导致丝杆51沿螺母52升降,底座4跟随丝杆51升降。
46.控制第二关节臂7旋转:
47.用户启动第二旋转电机61,所述第二旋转电机61带动旋转体63进行360度旋转,第二关节臂7跟随旋转体63进行360度旋转。
48.控制夹爪旋转:
49.用户启动第三旋转电机81,第三旋转电机81通过第二皮带84带动连接端头9进行360度旋转,夹爪跟随连接端头9进行360度旋转。